



💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
在当今数字化时代,随着物联网设备的爆炸式增长和对实时数据处理需求的不断提高,边缘计算作为一种能够在数据源附近提供计算服务的技术应运而生。多无人机辅助边缘计算网络则进一步拓展了边缘计算的应用范围和灵活性,而路径规划是确保该网络高效运行的关键环节。深度强化学习的引入为解决多无人机路径规划问题带来了新的思路和方法。
多无人机辅助边缘计算网络背景
边缘计算通过将计算和数据存储靠近数据源,减少数据传输延迟,提高系统响应速度。然而,传统的边缘计算节点位置固定,在一些场景下难以满足动态变化的计算需求。多无人机辅助边缘计算网络利用无人机的机动性,将其作为可移动的边缘计算节点,能够快速部署到需要的区域,为物联网设备提供及时的计算服务。例如,在自然灾害救援现场、大型户外活动现场等场景中,无人机可以迅速到达指定位置,为救援人员的设备或现场的监测设备提供计算支持。
路径规划的挑战
在多无人机辅助边缘计算网络中,路径规划面临诸多挑战。一方面,需要考虑多个无人机之间的协作与避碰,避免无人机相互干扰或发生碰撞,确保飞行安全。另一方面,要综合考虑边缘计算任务的需求,如任务的计算量、实时性要求等,合理安排无人机的飞行路径,使无人机能够及时到达任务发生地,为设备提供有效的计算服务。此外,环境因素如天气、障碍物等也会对无人机的飞行产生影响,增加了路径规划的复杂性。
深度强化学习的原理及优势
深度强化学习结合了深度学习强大的感知和表示能力与强化学习的决策能力。在深度强化学习中,智能体(如无人机)通过与环境进行交互,不断尝试不同的动作,并根据环境反馈的奖励信号来学习最优的策略。对于多无人机路径规划问题,深度强化学习具有以下优势: 适应动态环境:能够实时感知环境的变化,如障碍物的移动、任务需求的更新等,并及时调整无人机的飞行路径,具有很强的适应性。
考虑长期收益:通过强化学习的机制,智能体不仅关注当前的奖励,还会考虑长期的累积奖励,从而制定出更全局优化的路径规划策略。
处理高维复杂问题:深度学习的神经网络可以处理高维的状态和动作空间,能够有效应对多无人机路径规划中涉及的复杂信息,如多个无人机的位置、速度、任务状态等。
基于深度强化学习的路径规划方法
环境建模:将多无人机辅助边缘计算网络抽象为一个环境模型,包括无人机的状态(位置、速度、剩余电量等)、任务的状态(计算量、截止时间等)、环境的状态(障碍物分布、天气情况等)。
智能体设计:每个无人机作为一个智能体,其动作空间包括飞行方向、速度调整等。智能体根据当前的状态,通过深度强化学习模型选择合适的动作。 -
奖励设计:设计合理的奖励函数是深度强化学习的关键。奖励函数应综合考虑多个因素,如无人机是否按时到达任务点、是否与其他无人机发生碰撞、是否有效完成计算任务等。通过奖励信号引导智能体学习到最优的路径规划策略。
模型训练:使用大量的模拟数据对深度强化学习模型进行训练。在训练过程中,智能体不断与环境进行交互,根据奖励信号更新模型的参数,逐渐收敛到最优策略。
应用前景与挑战
应用前景:基于深度强化学习的多无人机辅助边缘计算网络路径规划在多个领域具有广阔的应用前景。在工业物联网中,可以实现对工厂内设备的实时监测和故障诊断;在智能交通中,为交通监控设备提供实时数据处理服务,提高交通管理效率;在农业领域,用于农田的精准监测和灌溉控制等。
挑战:尽管深度强化学习为多无人机路径规划提供了有效的方法,但仍然面临一些挑战。例如,训练深度强化学习模型需要大量的计算资源和时间;在实际应用中,环境的不确定性和复杂性可能导致模型的泛化能力不足;此外,多无人机之间的通信和协作机制也需要进一步完善,以确保整个网络的稳定运行。 综上所述,基于深度强化学习的多无人机辅助边缘计算网络路径规划是一个具有重要研究价值和应用前景的领域。随着技术的不断发展和完善,有望为解决复杂场景下的边缘计算需求提供更加高效、灵活的解决方案。
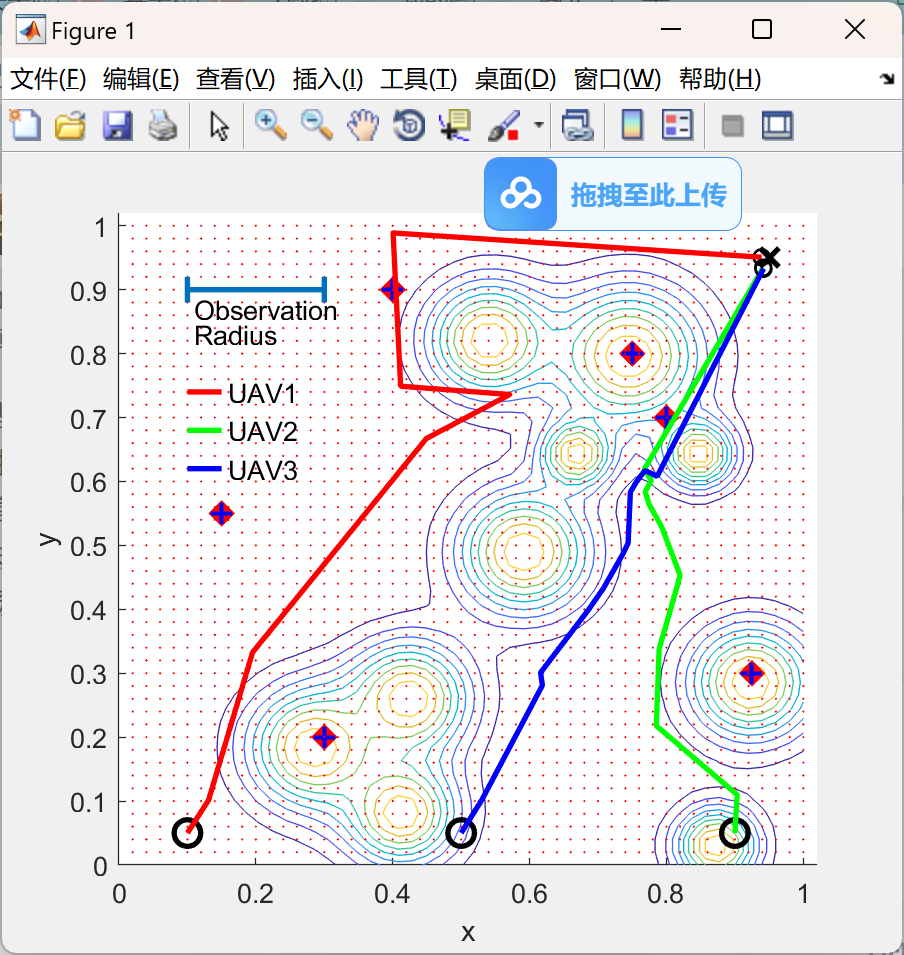
📚2 运行结果
主函数部分代码:
clc;clear;close all;
tic;
global N; %divide [0,1]*[0,1] map into N*N grid
global N2; % divide [0,1]*[0,1] map into N2*N2 grid when calculating weight matrix
global EPISOD_SUM;
global n; % parameter in sigmoid demand function
global B; % parameter in sigmoid demand function
global OBSER_RADIS; % observe radius 0<x<1
global SERVICE_RADIS; % the radius within which a TU can be served
global stepWay; % UAV one step length
global TU_info; % TUs location matrix
global TU_demand_matrix; % TUs service demand weight matrix
global K; %risk coefficient
global M; %service demand coefficient
global imgnum;
global plotFigure;
%% Customized parameters
K=20;
M=1;
isSigmoid=1; % 1-sigmoid,0-linear
plotFigure=1; % 1-Plotting,0-No plotting
%% map information
N=20;
N2=50;
EPISOD_SUM=20*N;
n=2;
B=8;
%% UAV information
OBSER_RADIS=0.2;
SERVICE_RADIS=0.2;
stepWay=0.02;
%% RUN
fprintf('K = %.1f, M = %.3f \n',K,M);
TU_info=getTU_info;
if(isSigmoid==1)
fprintf('Using sigmoid demand function.\n');
TU_demand_matrix=TU_demand;
else
fprintf('Using linear demand function.\n')
TU_demand_matrix=TU_demand_linear;
end
COUNT=zeros(1,size(TU_info,1)); % count each TU service time
initialize;
drawBackground;
main_UAVs;
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]夏云峰.无人机辅助移动边缘计算的路径规划和资源分配[D].哈尔滨工程大学,2024.
[2]何畅.基于智能优化算法的多无人机联合搜救路径规划与通信覆盖研究[D].广州大学,2024.DOI:10.27040/d.cnki.ggzdu.2024.001420.
🌈4 Matlab代码实现



















 925
925

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









