



💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
一、引言
在控制领域,线性二次型调节器(LQR)与强化学习(RL)是两种极具影响力的方法。LQR 凭借其成熟的理论基础,能针对线性系统,基于给定的二次型性能指标,高效求解最优控制策略,实现系统稳定与优化。强化学习则模拟生物从环境交互中学习的模式,通过智能体不断试错,依据奖励反馈来学习最优行为策略,以适应复杂多变的环境。当二者结合,有望融合 LQR 的精准高效与强化学习的灵活应变,为解决复杂系统控制问题开辟新路径。
二、结合方式与优势
- 初始化与引导:利用 LQR 为强化学习提供初始策略。对于复杂系统,强化学习从零开始学习策略耗时久,LQR 的最优控制律可作为初始策略,智能体基于此在环境中微调,加速学习进程。例如在机器人路径规划中,LQR 给出基本稳定路径,强化学习再优化避开动态障碍。
- 约束与优化:结合 LQR 的性能指标优化强化学习目标。强化学习追求奖励最大化,有时会忽视控制成本,引入 LQR 的二次型指标,能在优化奖励时兼顾控制能量消耗等因素,实现更平衡的控制。像无人机飞行控制,既保障飞行任务完成,又节省能源。
- 模型融合:构建混合模型架构。部分状态空间用 LQR 精确控制,复杂、不确定部分交给强化学习应对。如工业自动化生产线,设备常规运行由 LQR 维持,故障突发、工况剧变时,强化学习介入调整,提升系统整体可靠性。
三、应用领域
- 自动驾驶:车辆纵向控制结合 LQR 稳定车速,强化学习应对复杂路况如超车、避障,优化驾驶策略,提升行车安全性与舒适性。
- 机器人控制:机器人关节运动,LQR 保障基础动作精准,强化学习助力适应不同任务、抓取不规则物体,拓展机器人作业能力。
- 智能电网:电网频率调节,LQR 维持日常稳定,强化学习在用电高峰、故障冲击下灵活调配资源,保障供电可靠性。
四、挑战与展望
虽二者结合前景广阔,但挑战并存。一方面,二者融合的理论体系尚不完善,参数协调、模型切换等机制需深入研究;另一方面,计算复杂度高,尤其在大规模系统,实时性要求难以满足。未来,随着算法优化、硬件算力提升,LQR 与强化学习结合有望攻克难题,在更多前沿领域,如深空探测、生物医疗等,发挥关键控制效能,推动科技进步。
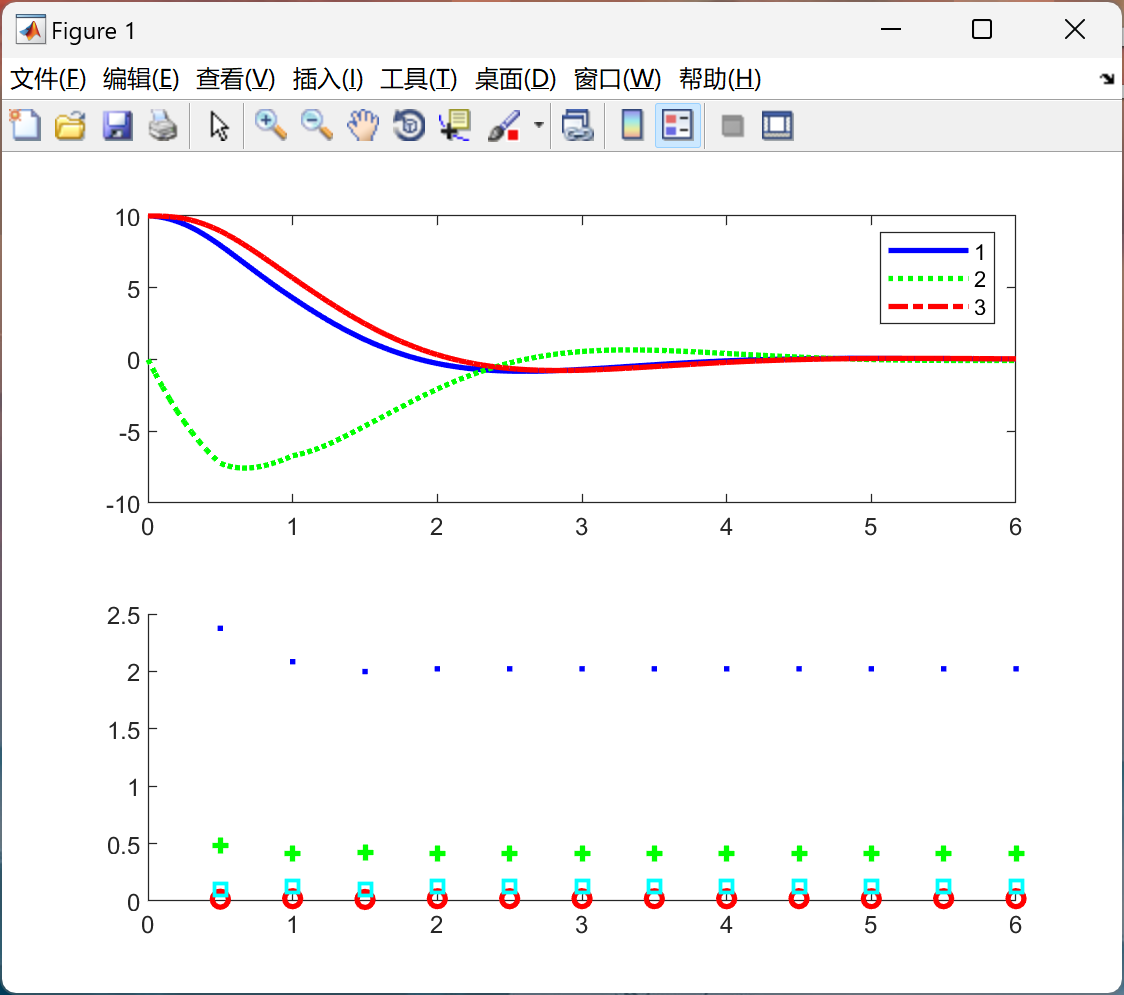
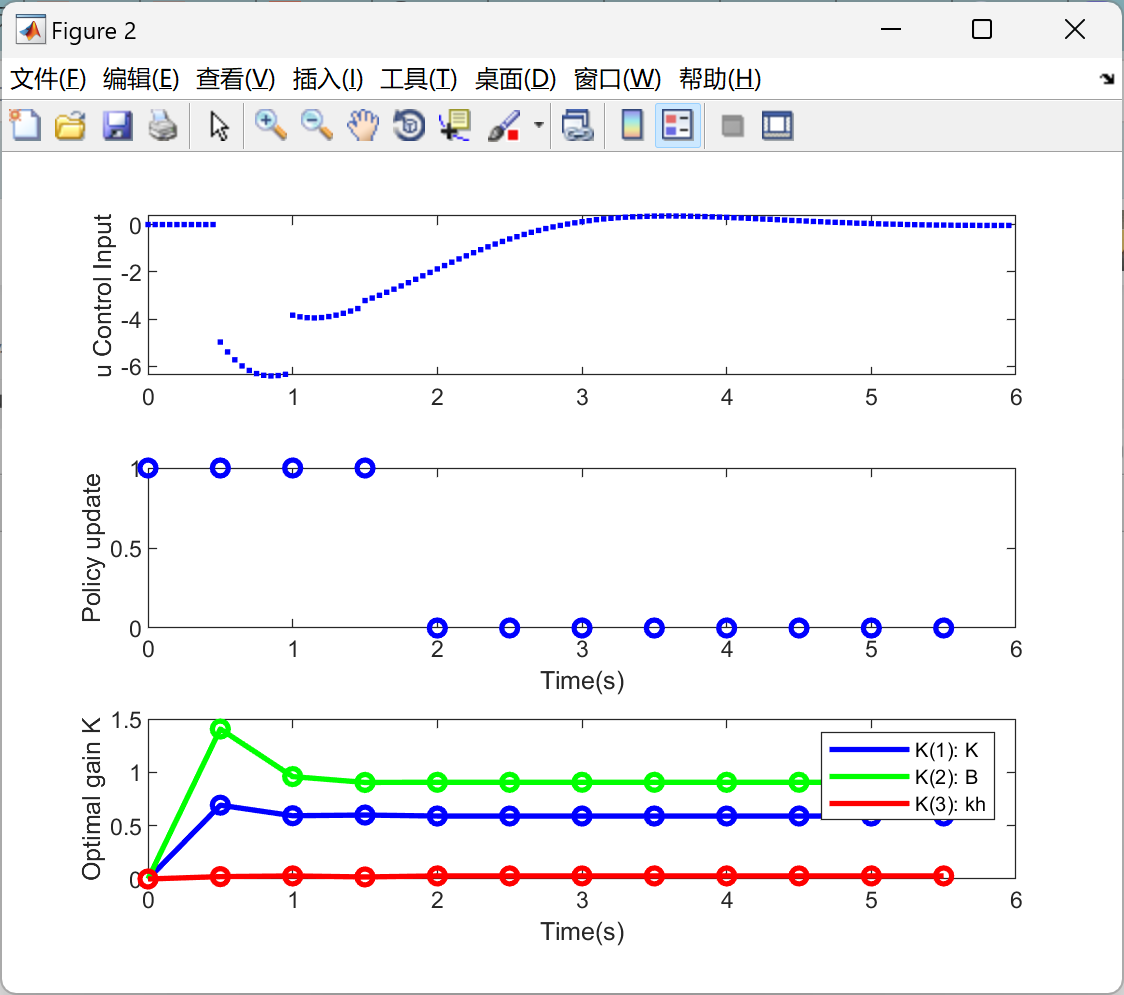
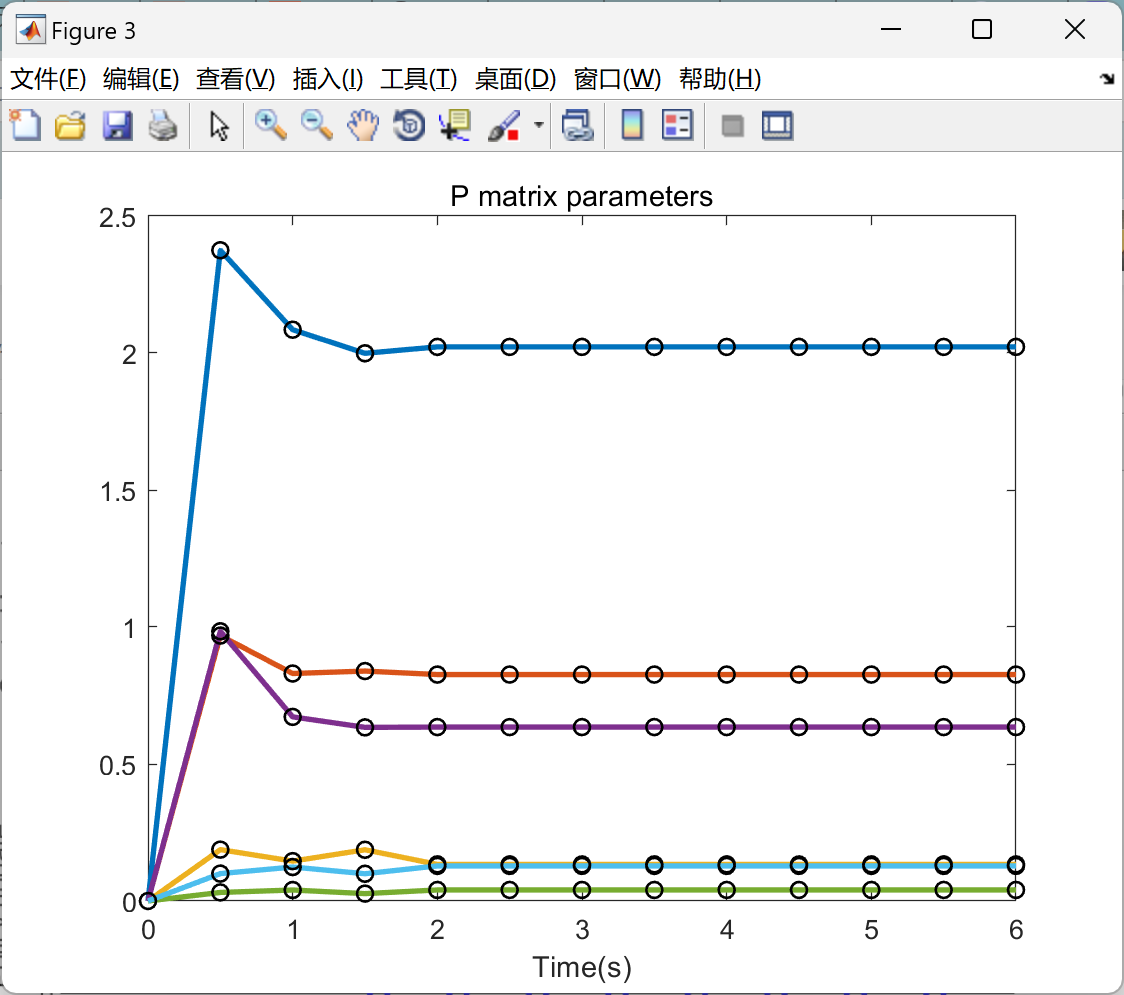
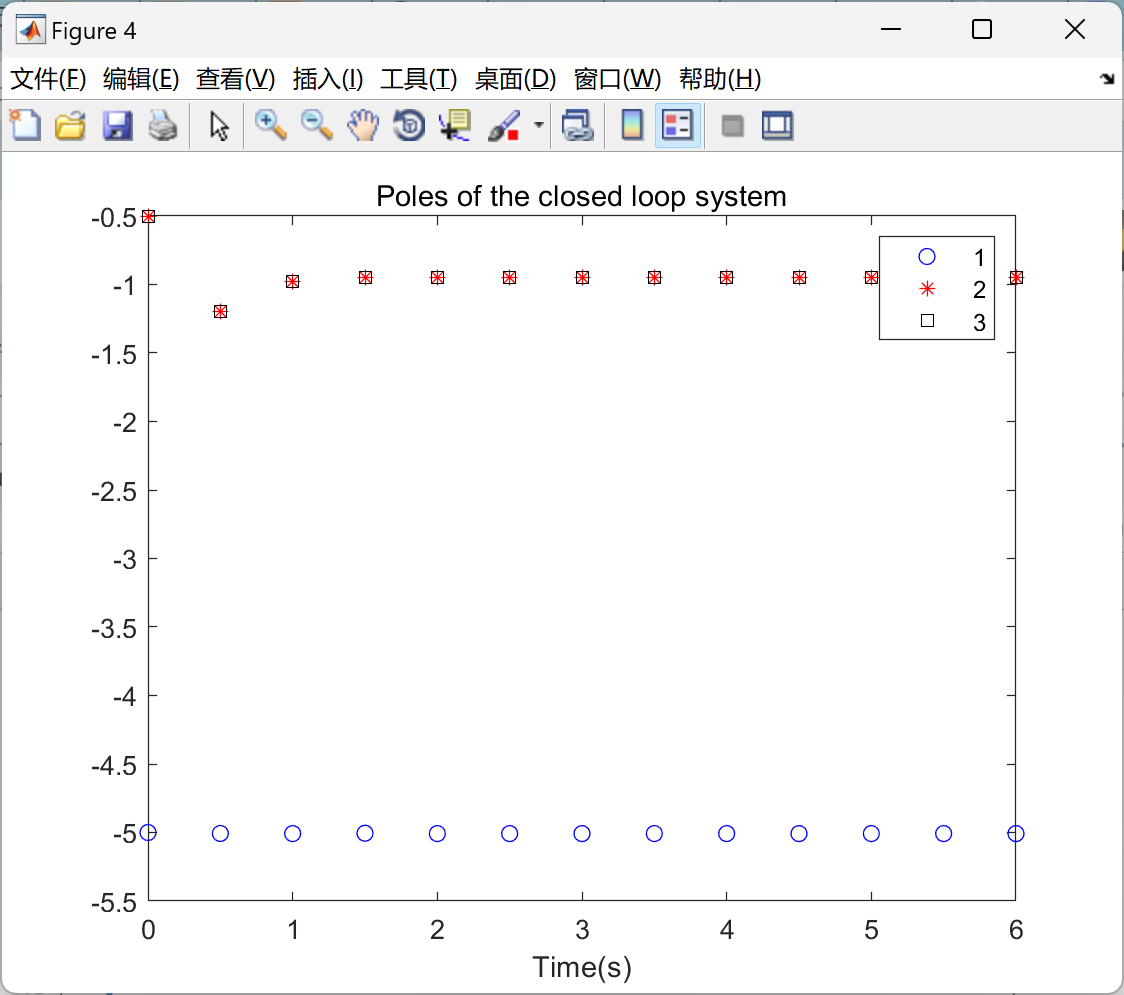
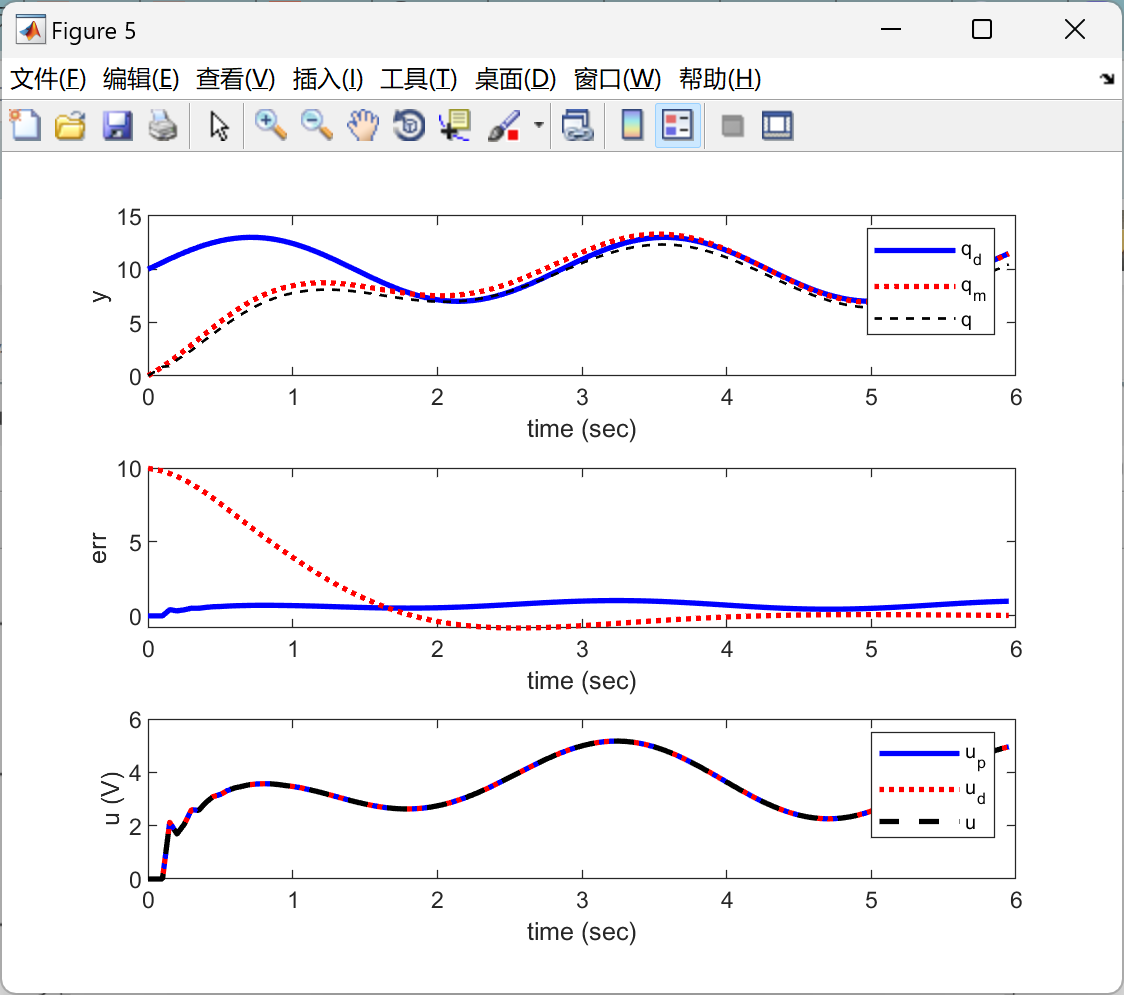
📚2 运行结果
主函数部分代码:
clear all;close all;clc;
%% Initialization
global P u T Tfinal epsilon A B C R HH C1 C2
global zero_G pole_G gain_G ke kd kp wn ode_k noise
% sample time
T=0.05; Tfinal = 6;
N=Tfinal/T; % Length of the simulation in samples
epsilon = 0.00000001; % For the converge
R = 0.7;
HH = 10; % Period of update policy
%system matrix
zero_G = []; pole_G = [-5]; gain_G = 5; % Human's model (zero, pole, gain)
G_fh = zpk(zero_G,pole_G,gain_G); [num, den] = tfdata(G_fh, 'v');
ke = num(2); kp = den(2); kd = den(1); % Human's parameter
wn = 1; % Natural frequency
A = [0 1 0; % System matrix
-2*wn -wn^2 0;
% 0 0 0;
ke/kd 0 -kp/kd];
B = -[0; 1; 0]; % Input matrix
C = [1 0 0];
eig_A = eig(A)
%initial conditions
x0_set = [10,0,10,0]
x0=x0_set; % 3 vectors and J
P=[0 0 0;
0 0 0;
0 0 0]; % Positive definite and symmetric matrix P
Pold = eye(3); Psave = zeros(length(P),length(P),2); % For monitoring P matrix
uu=[]; % saving the control signal for plot
xx=[]; % saving the state for plot
KK=[]; % saving the optimal gain for plot
% Vectorization: Parameters returned by the least squares
WW=[P(1,1); 2*P(1,2); 2*P(1,3); P(2,2); 2*P(2,3); P(3,3)];
WWP=[WW; 0];
% Parameters for the batch least squares
j=0; Xpi=[];
E=real(eig(A-B*inv(R)*B'*P)); % saves the poles of the closed loop system
EE = [E];
upd=[]; % stores information relative to updates the parameters
k=1; ch=0; % Real time iteration, Interval iteration
qm = zeros(10,1);
qd = zeros(10,1); qd(1) = x0_set(1);
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]陈戈,张俊勃,彭颖,等.基于空间裁剪强化学习的连锁故障调切结合紧急控制方法[J/OL].电力系统自动化,1-15[2025-02-27].http://kns.cnki.net/kcms/detail/32.1180.TP.20250223.1915.002.html.
[2]孙慧.结合学生学习特点,强化英语词汇落实——以牛津译林版六年级上册Unit 7为例[J].英语画刊(高中版),2025,(05):67-69.
🌈4 Matlab代码实现


















 4987
4987

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









