



💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
在当今复杂多变的海洋局势下,无人水面航行器(USV)的应用日益广泛,无论是在军事对抗、海上安保还是海洋科考等领域,其渗透与拦截策略模拟都具有至关重要的意义,为实战运用、任务规划以及风险评估提供了关键的决策依据。
一、模拟基础
- 环境建模:构建逼真的海洋环境是模拟的首要任务。这涵盖了对海洋地理信息的精准描绘,包括不同深度的海底地形、海岸线轮廓、岛屿分布等,利用数字化地图与地理信息系统(GIS)技术,将这些静态特征直观呈现。同时,动态环境因素同样不可忽视,如实时的海流流向与流速变化,通过海洋监测数据结合流体力学模型进行模拟;海面的风浪状况,依据气象预报数据与波浪理论生成相应的波浪高度、周期等参数,为 USV 的行动塑造出一个复杂且多变的海洋场景。
- USV 建模:准确刻画 USV 的物理特性与性能参数是模拟的核心要素之一。从船体的几何形状、尺寸大小到重量分布,这些因素决定了 USV 在水中的浮力、稳定性与操控性。动力系统建模尤为关键,详细描述推进器类型、功率、效率以及其在不同工况下的运行特性,这直接关乎 USV 的航速、加速度与续航能力。此外,还需考虑 USV 搭载的各类传感器,如雷达、声呐、光学相机等,对它们的探测范围、精度、盲区以及数据传输延迟等进行建模,模拟出接近真实作战或作业场景下 USV 的信息感知能力。
二、渗透策略模拟
- 路径规划:在模拟渗透场景中,USV 需要巧妙避开敌方的监测与拦截,选择最优的渗透路径。基于 A*、Dijkstra 等经典路径搜索算法,结合海洋环境模型,考虑海流助力、风浪影响以及避开已知敌方巡逻区域等因素,规划出一条隐蔽且高效的航线。例如,利用海流推动降低能耗,同时借助复杂的海底地形或岛屿阴影隐藏行踪,逐步靠近目标区域。
- 伪装与隐身:为增强渗透成功率,模拟 USV 采用多种伪装与隐身技术。在电磁频谱方面,通过吸波材料降低雷达反射截面积,模拟雷达隐身效果;对于声学探测,优化 USV 的外形设计与推进系统降噪技术,减少水下噪声辐射,躲避声呐搜索。还可利用环境光、海水颜色等因素,调整 USV 的外观涂装,使其视觉上更难被发现,在模拟环境中实现全方位的隐蔽渗透。
- 智能决策:引入人工智能算法,让 USV 在渗透过程中能够根据实时的环境变化与敌方动态,自主做出决策。例如,当遭遇敌方临时增设的巡逻船只时,基于机器学习模型判断是绕行、潜伏等待还是采取迷惑手段,确保渗透行动顺利进行,最大程度地达成战略目标。
三、拦截策略模拟
- 目标探测与定位:模拟拦截方利用多种手段对入侵的 USV 进行早期探测与精确定位。通过岸基、海基或空基的雷达网络,协同声呐浮标等水下探测设备,构建全方位的立体探测体系,实时监测海域动态,一旦发现可疑目标,迅速融合多源数据,精准锁定 USV 的位置、航速、航向等关键信息,为后续拦截行动提供准确情报。
- 拦截路径优化:依据探测到的 USV 信息,运用模型预测控制、快速搜索随机树(RRT)等算法,为拦截 USV 的己方舰艇或无人机规划最佳拦截路径。考虑到双方的速度、机动性以及海洋环境因素,确保拦截路径既高效又可行,能够在最短时间内与目标接触,实现成功拦截。
- 协同作战:在模拟场景中,展现多平台协同拦截的威力。将舰艇、直升机、固定翼飞机以及其他 USV 等不同作战平台有机组合,根据各自的优势进行任务分工。舰艇利用其强大的火力与续航能力进行远程追击;直升机凭借灵活的机动性进行低空快速侦察与近距离干扰;USV 则可在复杂海域或危险区域代替有人舰艇执行任务,通过数据链实现信息共享与协同作战,形成一张严密的拦截大网,有效应对 USV 的渗透威胁。
四、模拟应用
- 军事训练:为海军、海岸警卫队等提供高度逼真的虚拟训练环境,让操作人员熟悉 USV 的渗透与拦截战术,提升实战技能,减少实兵演练的成本与风险,同时可以反复演练不同场景下的应对策略,快速积累作战经验。
- 作战方案评估:在战前规划阶段,通过模拟不同的渗透和拦截策略,对作战方案进行可行性分析与优化。评估各种策略下己方的胜算、可能的损失以及潜在风险,为决策者提供科学依据,确保作战计划的周密性与可靠性。
- 技术研发验证:针对新型 USV 技术、传感器装备或作战算法,利用模拟环境进行验证测试。观察它们在渗透与拦截场景中的表现,发现问题及时改进,加速新技术的研发与应用进程,推动 USV 相关技术的不断进步。
五、挑战与展望
- 模型精度挑战:尽管努力构建逼真的环境与 USV 模型,但海洋环境的极端复杂性以及 USV 技术的快速发展,使得模型误差难以完全避免。深海高压、低温环境下的物理特性模拟,以及新型 USV 的独特性能刻画,都需要进一步提升模型精度,以确保模拟结果的可靠性。
- 算法复杂度与实时性矛盾:在模拟过程中,一些先进的路径规划、决策算法计算量大,在追求高精度模拟的同时,可能无法满足实时性要求,影响模拟的流畅性与实用性。未来需要在算法优化、硬件加速等方面下功夫,解决这一矛盾。
- 多智能体交互难题:随着 USV 与其他作战平台协同作战趋势的增强,模拟多智能体之间的复杂交互成为新的难题。如何准确模拟它们之间的信息共享、协作冲突以及动态协调机制,是提升模拟效果的关键所在。
展望未来,随着人工智能、大数据、高性能计算等技术的飞速发展,USV 渗透和拦截策略模拟将迎来新的突破。更精准的模型、更高效的算法、更逼真的模拟场景将不断涌现,为海洋安全与军事对抗领域提供更强大的技术支撑,助力应对日益复杂的海上挑战。
📚2 运行结果
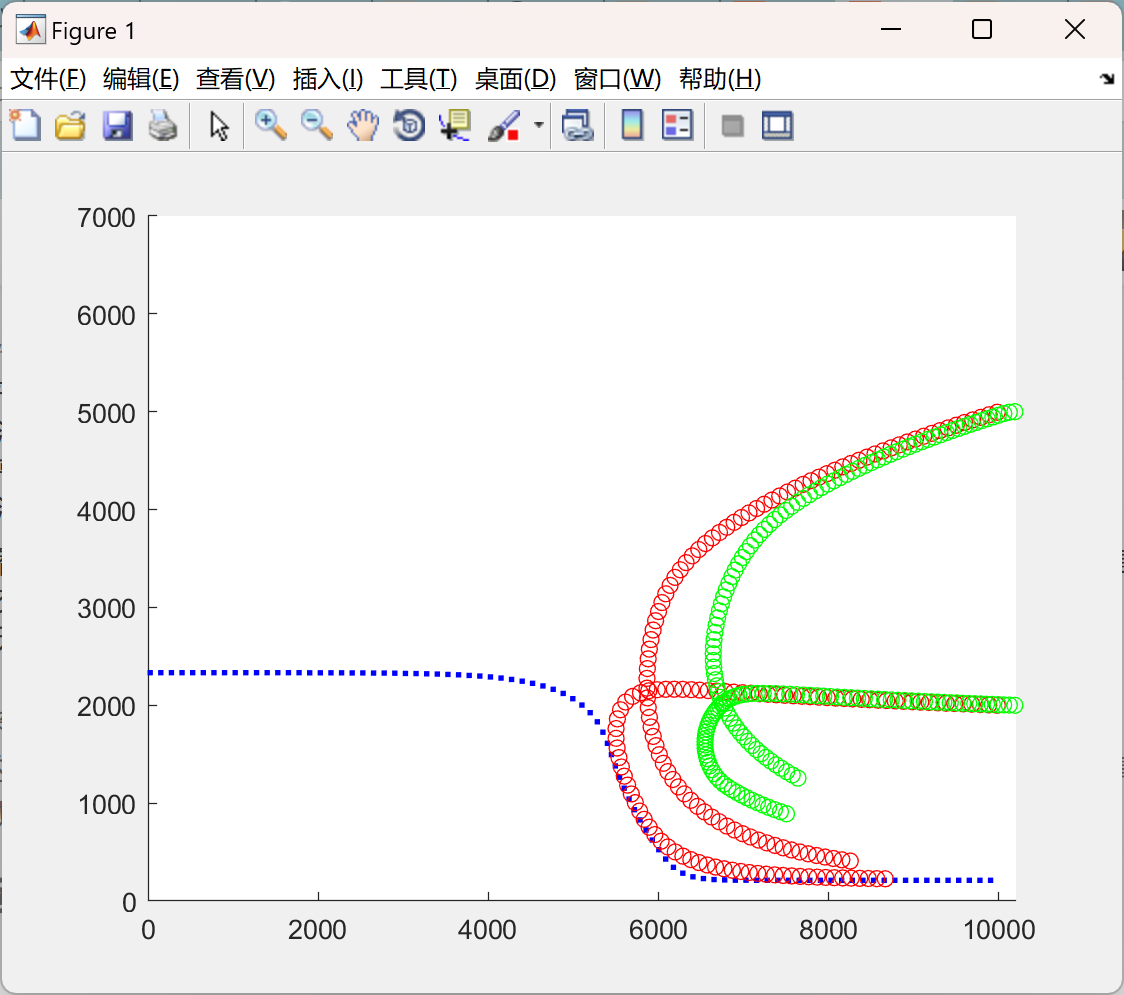
部分函数代码:
close all
global ddBmax dt vB M vRc0 vRcmax
L=1e4;
M=7000;
pR1n=[L,5*M/7];%红中心点1初始位置坐标[x,y]
pR2n=[L,2*M/7];
pRc1n=[L+200,pR1n(2)];%红运输舰初始位置 在红集群之后200m
pRc2n=[L+200,pR2n(2)];%以后Rc代表红运输舰,R代表红集群中心
pBn=[0,M/3];
rB=100;%蓝最小转弯半径
rR=80;
rRc=500;
vB=25;%蓝速度m/s
vR=20;%红中心点速度m/s
vRc0=13;%红运输舰初始速度
vRcmax=16;%红运输舰最大速度
ddBmax=dt*vB/rB;%蓝方向变化最大角度
ddRmax=dt*vR/rR;
dt=1;%模拟间隔时间
dBn=0;%蓝初始方向角
dR1n=atan((pBn(2)-pR1n(2))/(pBn(1)-pR1n(1)))+pi;%红1初始化方向,指向蓝方
dR2n=atan((pBn(2)-pR2n(2))/(pBn(1)-pR2n(1)))+pi;%第23象限角,朝x负方向运动
dRc1n=pi; dRc2n=pi;
Dth=123;
t=0;
hold on
axis([0 L+200 0 M])%坐标轴范围
vRc1=vRc0; vRc2=vRc0;
while pBn(1)<L & t<700 & min(norm(pBn-pR1n),norm(pBn-pR2n))>Dth
pB=pBn;%更新位置
pR1=pR1n; pR2=pR2n; pRc1=pRc1n; pRc2=pRc2n;
dB=dBn;%更新方向
dR1=dR1n; dR2=dR2n; dRc1=dRc1n; dRc2=dRc2n;
dBn=cal_direcB(dB,pB,pR1,pR2);%下一蓝速度方向角
pBn=cal_position(pB,vB,dB);%下一蓝位置坐标
%由蓝的位置坐标计算红的速度方向
dR1n=cal_direc(dR1,pB,pR1,ddRmax);%下一红1速度方向角
%输入上一个红的方向角,蓝的位置坐标为目标,红的位置坐标,输出下一个红的方向角
dR2n=cal_direc(dR2,pB,pR2,ddRmax);
ddRcmax1=dt*vRc1/rRc;
ddRcmax2=dt*vRc2/rRc;
dRc1n=cal_direc(dRc1,pB,pRc1,ddRcmax1);%下一红运输舰1速度方向角
%红集群的位置坐标为目标
dRc2n=cal_direc(dRc2,pB,pRc2,ddRcmax2);
pR1n=cal_position(pR1,vR,dR1);%由速度方向确定下一红1位置坐标
pR2n=cal_position(pR2,vR,dR2);
vRc1=get_vRc(pR1,pB,pRc1);%获得运输舰速度大小 由相对位置决定
vRc2=get_vRc(pR2,pB,pRc2);
pRc1n=cal_position(pRc1,vRc1,dRc1);%下一红运载舰1位置坐标
pRc2n=cal_position(pRc2,vRc2,dRc2);
if min(norm(pRc1n-pB),norm(pRc2n-pB))<1000
disp('蓝与红运载舰距离过近')
r=2;
return
end
if max(norm(pRc1n-pR1n),norm(pRc2n-pR2n))>2000+Dth
disp('红运载舰与集群距离过远')
r=2;
return
end
if mod(t,5)<0.1 %5s更新一次图
scatter(pBn(1),pBn(2),'b.')
scatter(pR1n(1),pR1n(2),'r')
scatter(pR2n(1),pR2n(2),'r')
scatter(pRc1n(1),pRc1n(2),'g')
scatter(pRc2n(1),pRc2n(2),'g')
end
pause(0.0002)
t=t+dt;
end
if min(norm(pBn-pR1n),norm(pBn-pR2n))<=Dth
disp('successful interception')
r=0;
elseif t>=700
disp('time out')
r=0;
else
disp('successful penetration')
r=1;
end
function dBn=cal_direcB(dB,pB,pRc1,pRc2)
%输入上一个蓝的方向角,蓝的位置坐标,红的位置坐标,输出下一个蓝的方向角
global ddBmax vB M
Dbr=min(norm(pRc1-pB),norm(pRc2-pB));
D0=300;%临界距离 该距离下蓝方竖直速度最大
Deth=500;%蓝方与边界距离阈值,小于后竖直速度减小
a0=0.001;
if pB(2)<M/2 %下半平面蓝向下运动
k=-1;
else
k=1;
end
if Dbr>D0
vy=k*vB*exp(-a0*(Dbr-D0));
else
vy=k*vB;
end
if k==1%向上运动
De=M-pB(2);%到上边界的距离
else%向下
De=pB(2);
end
if De<Deth
vy=vy*(-3/Deth^2*De*(De-2*Deth)-2);
end
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]郝琨,杨林菲,刘琦,等.改进动态避障策略和可变步长A*的USV路径规划[J].物联网技术,2025,15(03):90-99.DOI:10.16667/j.issn.2095-1302.2025.03.023.
[2]盛金亮,董早鹏,匡文琪,等.基于改进DWA的无人艇编队避障及MPC轨迹跟踪[J].大连海事大学学报,2024,50(04):12-21.DOI:10.16411/j.cnki.issn1006-7736.2024.04.002.
🌈4 Matlab代码实现


















 33
33

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









