



💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
移动机器人的路径规划优化是指在给定环境中,通过算法和技术确定机器人从起点到目标点的最优路径。这个过程旨在使机器人尽快、尽量避开障碍物地到达目的地。 移动机器人在执行任务时需要遵循特定的路径,例如在仓库中移动货物、在城市中导航等。 环境中可能存在障碍物、限制条件(如最小转弯半径、最大速度等)以及其他机器人等因素,这些因素都会影响路径规划的复杂性和优化目标。 路径规划通常包括建立地图、确定起点和目标、搜索路径和优化路径等步骤。 优化路径可以是最短路径、最快路径、最节能路径或最安全路径,具体取决于机器人的任务和环境条件。移动机器人的路径规划优化涉及到算法、环境和任务目标等多方面因素,在不同的场景下可能采用不同的方法和技术来实现最优路径规划。
📚2 运行结果
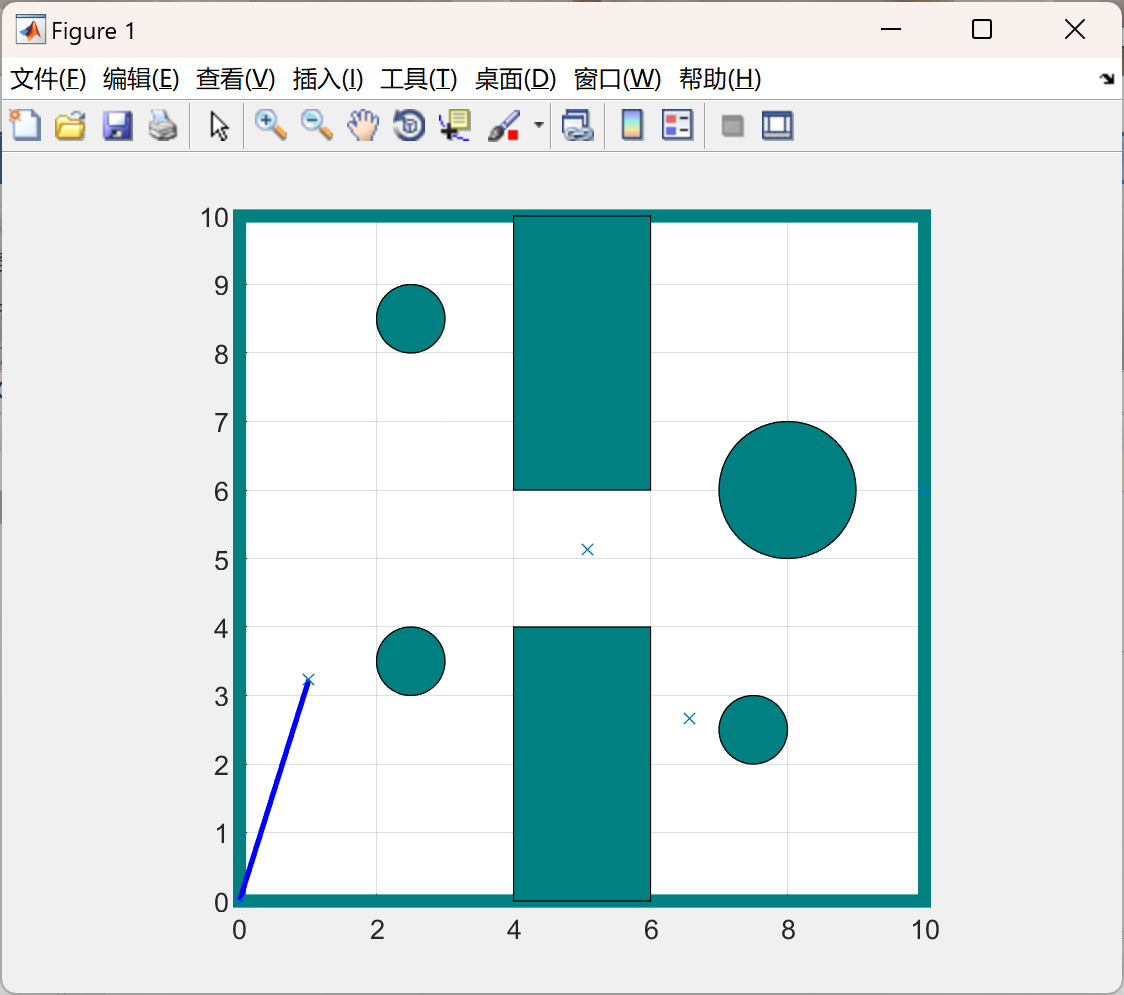
主函数部分代码:
%%
clear all
clc
close all
%%
%Declare initial and final positions required
robot_initial_pos=[0, 0];
robot_final_pos=[10, 6];
f=pathplan(robot_initial_pos,robot_final_pos);
environment;
pos=[robot_initial_pos;f;robot_final_pos];
%%
%Plotting functions included here
i=1;
fx=size(f);
while i<=fx(1)+1
if i==1
plot([robot_initial_pos(1),f(i,1)],[robot_initial_pos(2),f(i,2)],'b','LineWidth',2)
elseif i==fx(1)+1
plot([f(i-1,1),robot_final_pos(1)],[f(i-1,2),robot_final_pos(2)],'y','LineWidth',2)
else
plot([f(i,1),f(i,1)],[f(i,2),f(i,2)],'r','LineWidth',2)
end
plot(pos(:,1),pos(:,2),'x')
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]李宗刚,王治平,夏广庆,等.基于动态避障风险区域的仿生机器鱼路径规划方法[J/OL].机器人:1-15[2024-06-03].https://doi.org/10.13973/j.cnki.robot.230281.
[2]罗荣浩,干熊,杨光友.具有避障功能的农机自动作业全覆盖路径规划方法[J/OL].农机化研究:1-8[2024-06-03].https://doi.org/10.13427/j.cnki.njyi.20240528.006.
🌈4 Matlab代码实现


















 865
865

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









