



💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
避障路径规划避障路径规划是机器人、自动驾驶等领域中的关键问题之一。其主要目标是为移动主体(如机器人、车辆等)在存在各种障碍物的环境中找到一条安全、高效的路径,从起始位置到达目标位置。 在避障路径规划中,首先需要对环境进行感知和建模。通过传感器(如激光雷达、摄像头等)获取周围环境的信息,并将其转化为适合路径规划算法处理的模型,如栅格地图、拓扑地图等。 然后,选择合适的路径规划算法。常见的算法包括 A*算法、Dijkstra 算法、人工势场法等。这些算法根据环境模型和特定的优化目标,计算出从起始点到目标点的最佳路径。优化目标通常包括路径长度最短、时间最短、能耗最低等。 在路径规划过程中,必须考虑障碍物的存在。算法需要实时检测和避开障碍物,以确保移动主体的安全。这可能涉及到动态调整路径、重新规划等操作。 对于复杂的动态环境,还需要考虑其他因素,如其他移动对象的行为预测、环境变化的不确定性等。一些先进的避障路径规划方法结合了机器学习和人工智能技术,以提高对复杂环境的适应能力和规划效率。 总之,避障路径规划是一个复杂而具有挑战性的任务,需要综合考虑环境感知、算法选择、障碍物处理和动态适应性等多个方面,以实现移动主体在各种环境中的安全、高效导航。
📚2 运行结果
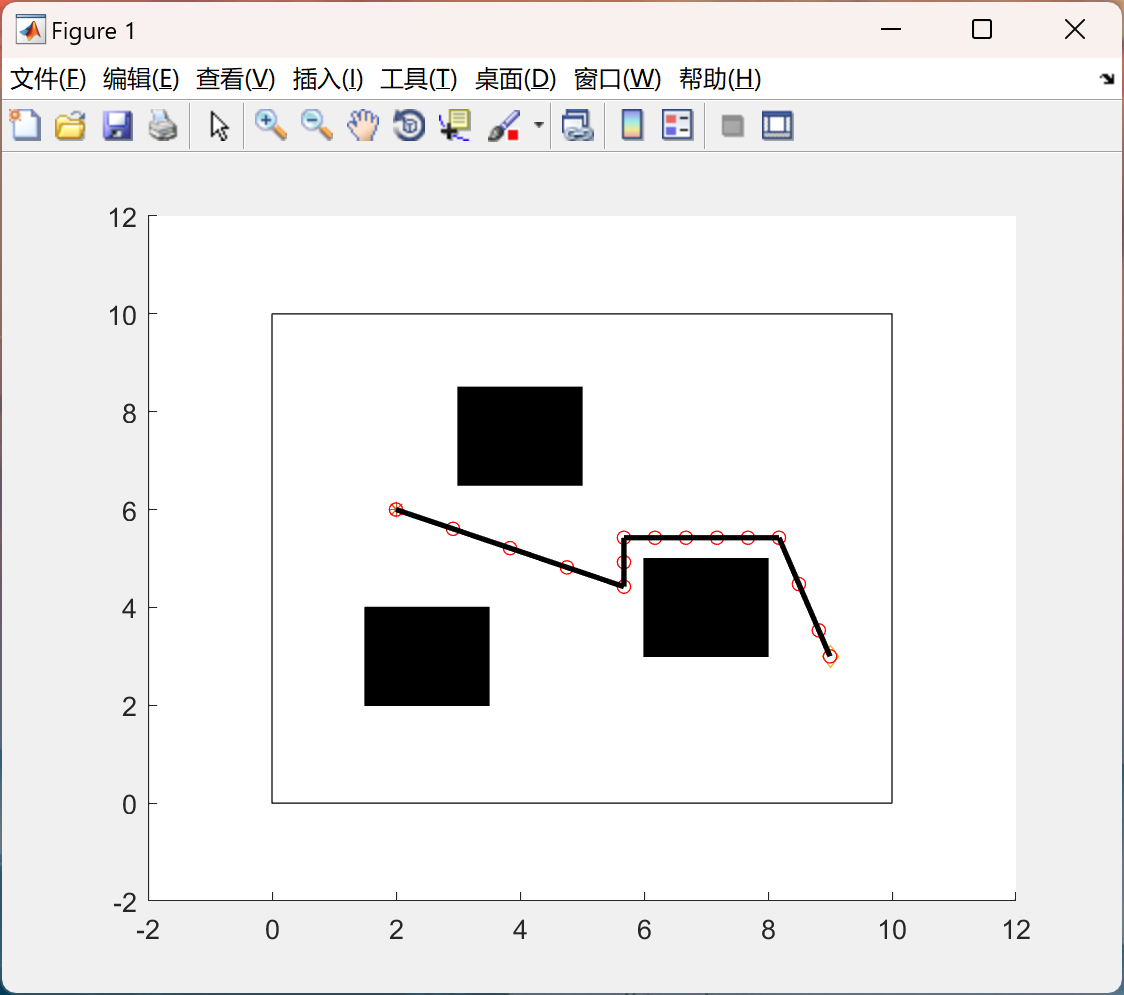
主函数部分代码:
close all
clear all
clc
% Making Rectangular arena first of 10*10
arena = polyshape([0 10 10 0],[0 0 10 10]);
plot(arena,'Facecolor','white');
% Making Obstacles within the arena
obstacles = [1.5 2 3.5 2 3.5 4 1.5 4;
3 6.5 5 6.5 5 8.5 3 8.5;
6 3 8 3 8 5 6 5];
num_obstacles = size(obstacles,1);
for i_obs = 1:num_obstacles
obs_x = [obstacles(i_obs,1) obstacles(i_obs,3) obstacles(i_obs,5) obstacles(i_obs,7)];
obs_y = [obstacles(i_obs,2) obstacles(i_obs,4) obstacles(i_obs,6) obstacles(i_obs,8)];
patch(obs_x,obs_y,'black');
end
hold on
% Declare the starting point and goal point
x_s = 2;
y_s = 6;
x_g = 9;
y_g = 3;
hold on
plot(x_s,y_s,'*');
plot(x_g,y_g,'d');
% Calling Planner
path = planner(x_s,y_s,x_g,y_g,obstacles);
path(size(path,1),1) = x_g;
path(size(path,1),2) = y_g;
for i = 1:size(path,1)
hold on
plot(path(i,1),path(i,2),'ro','MarkerSize',5);
if i>1
hold on
plot([path(i,1) path(i-1,1)],[path(i,2) path(i-1,2)],'k','LineWidth',2);
end
pause(.1)
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]王修业,周贤,孙芹芹,等.复杂场景下无人机自主路径规划与避障控制:穿越迷宫[J/OL].控制工程,1-10[2024-10-26].https://doi.org/10.14107/j.cnki.kzgc.20240590.
[2]曾庆杨,王荣浩.基于目标搜索的无人车路径规划研究[J/OL].自动化技术与应用,1-7[2024-10-26].http://kns.cnki.net/kcms/detail/23.1474.TP.20241018.1103.034.html.
🌈4 Matlab代码实现


















 659
659

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









