



💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
文献来源:

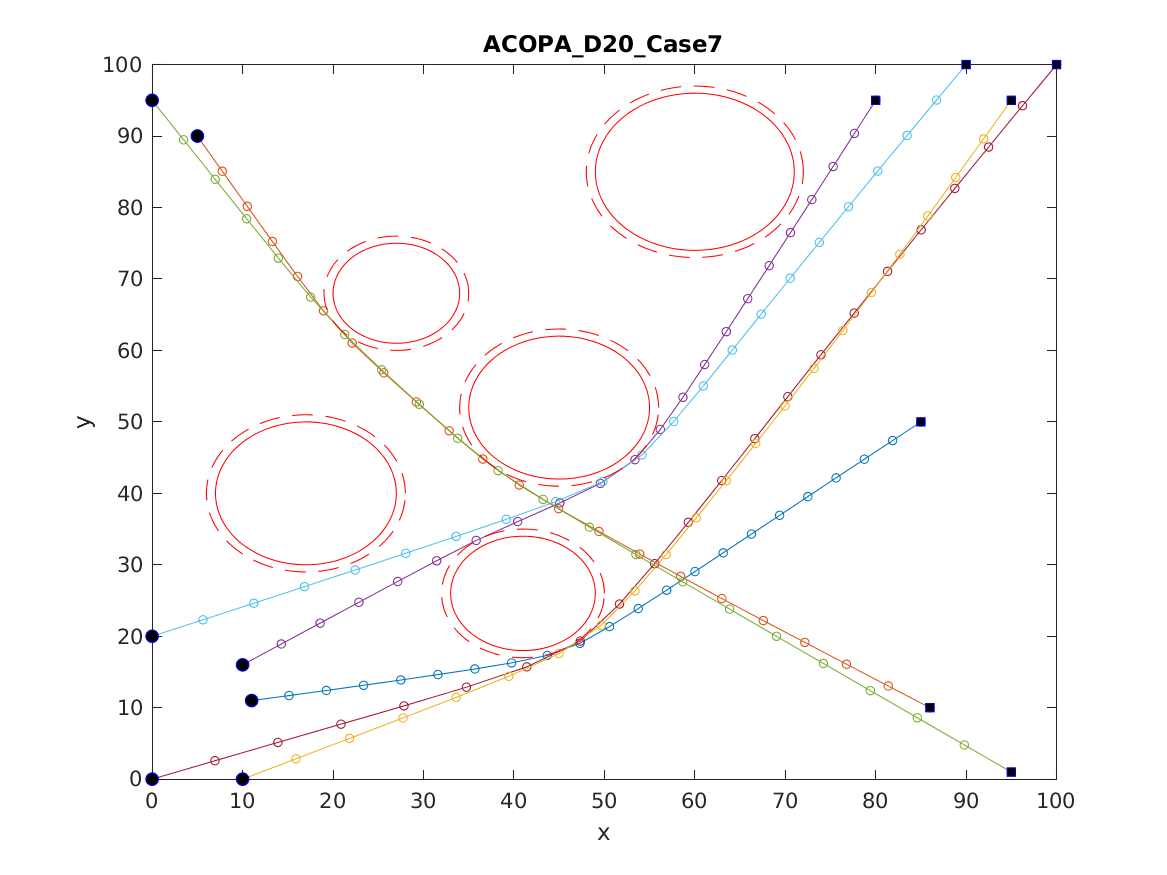
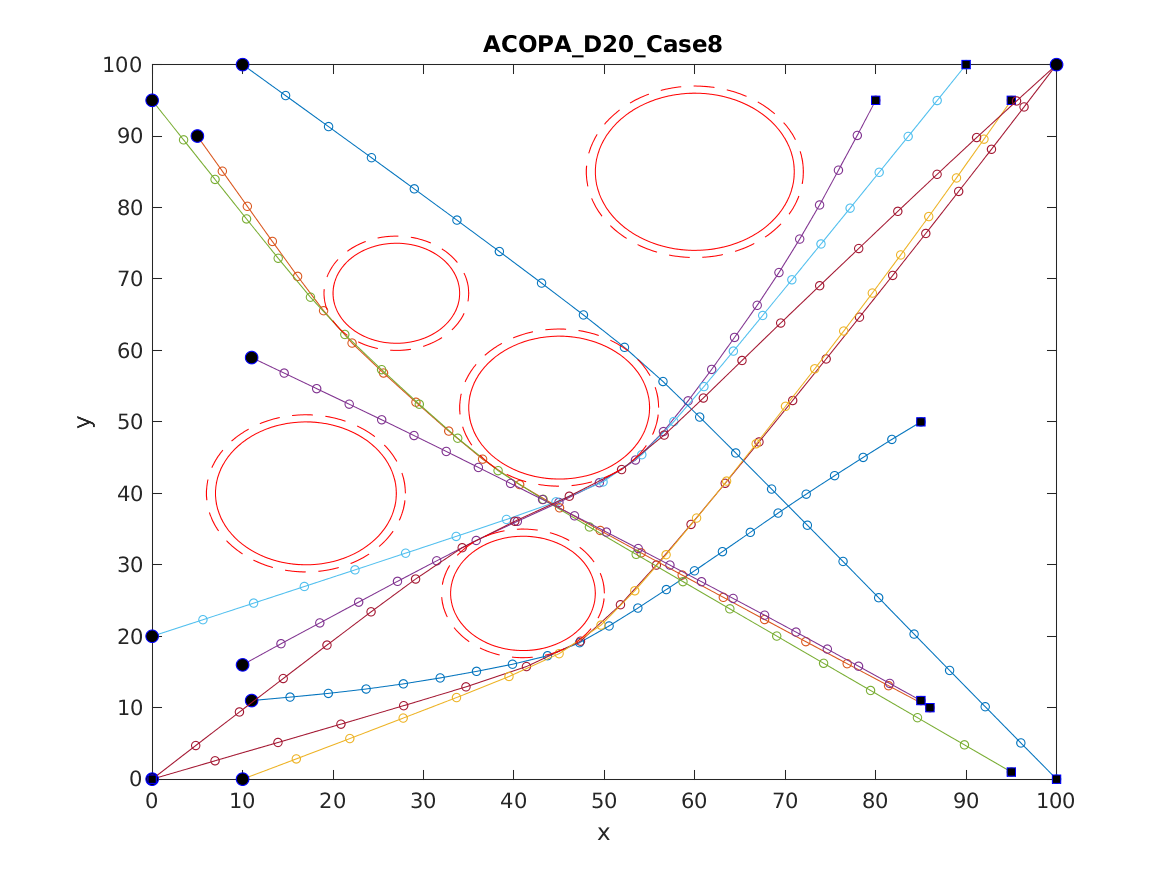
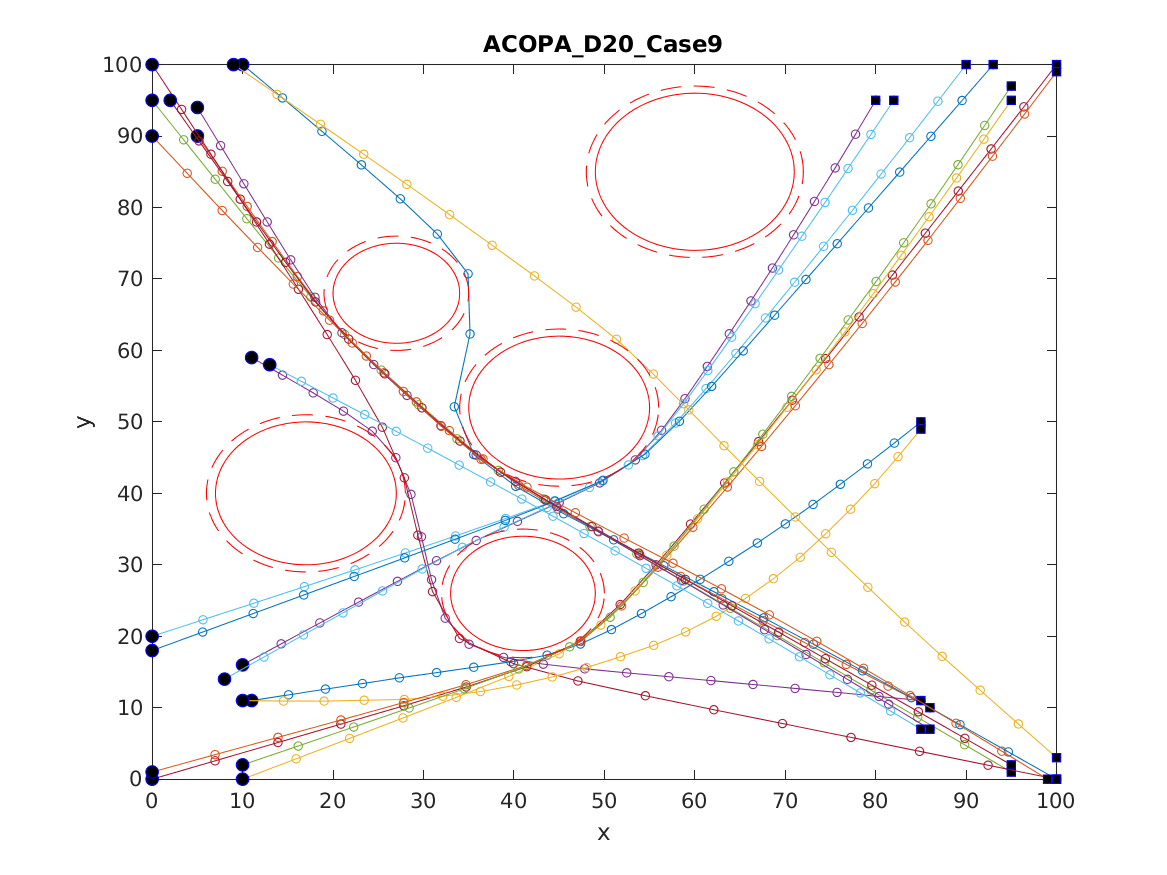
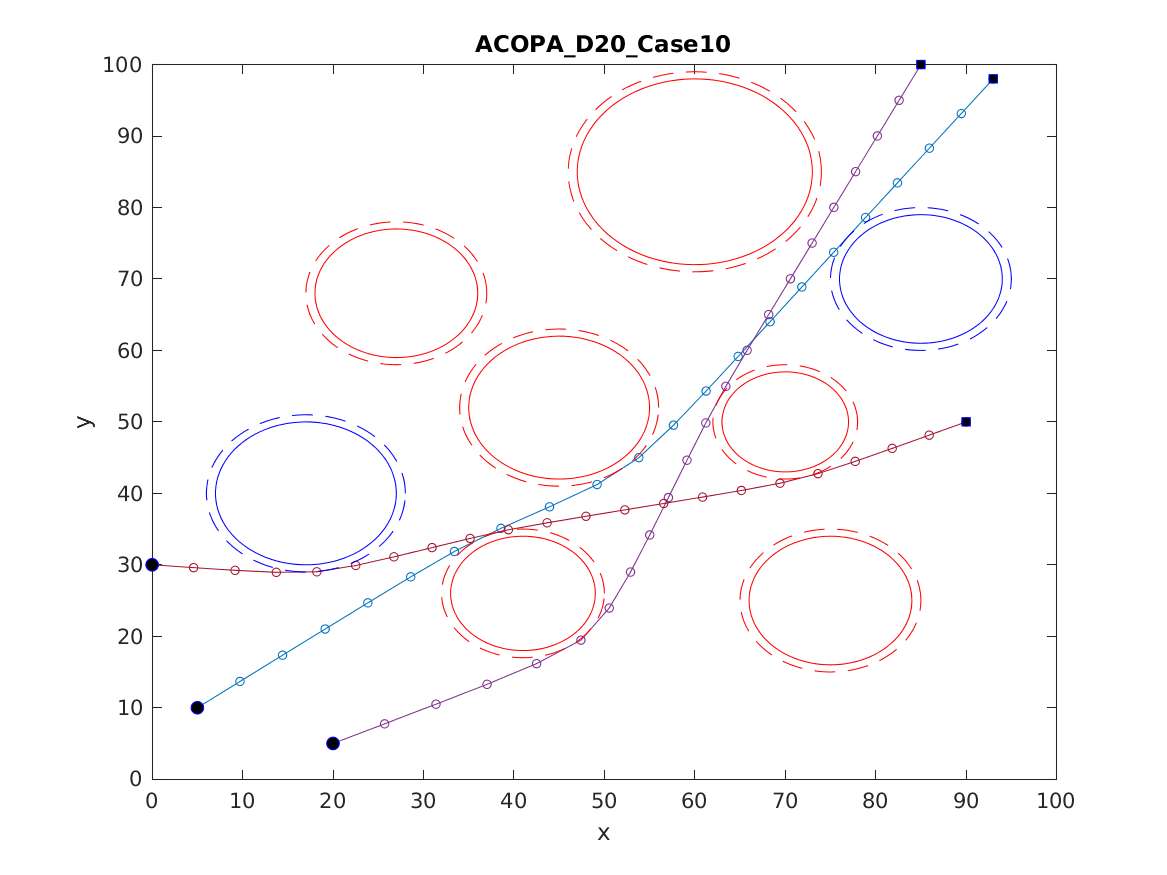
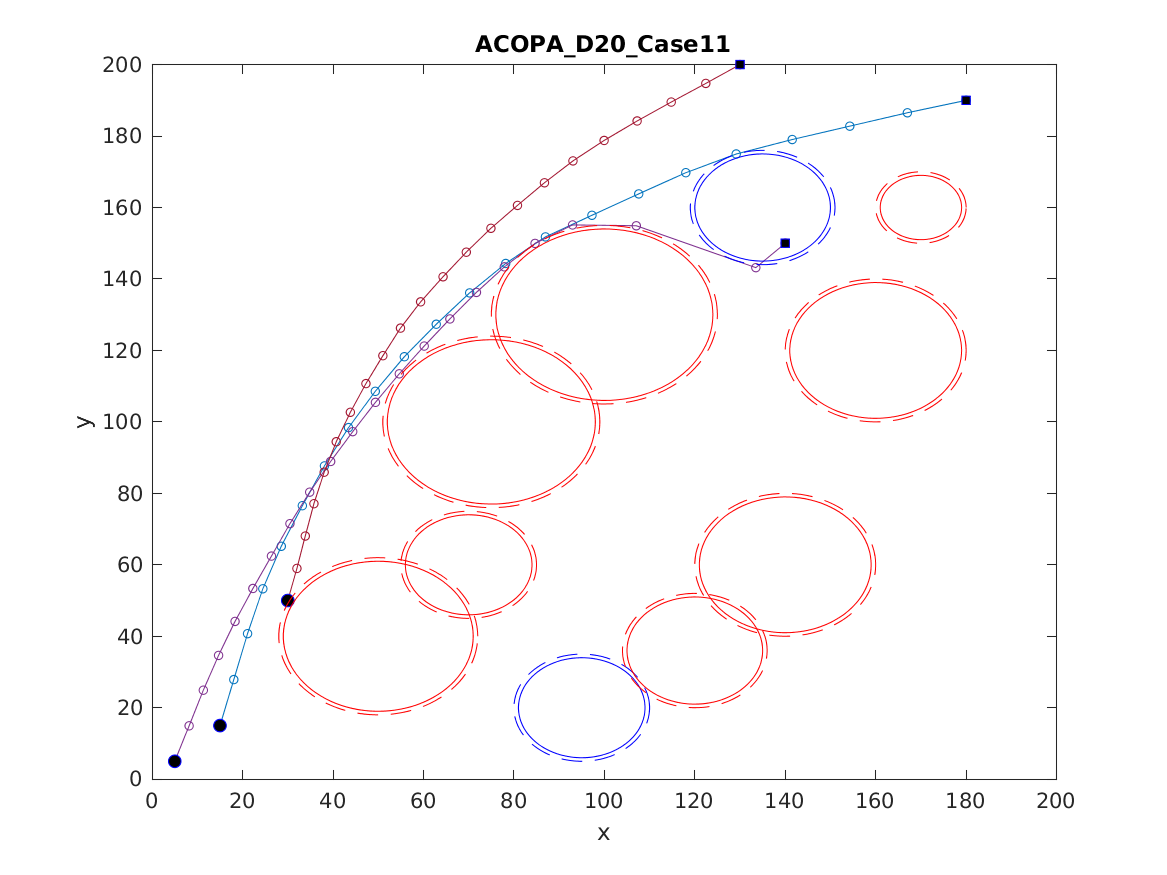
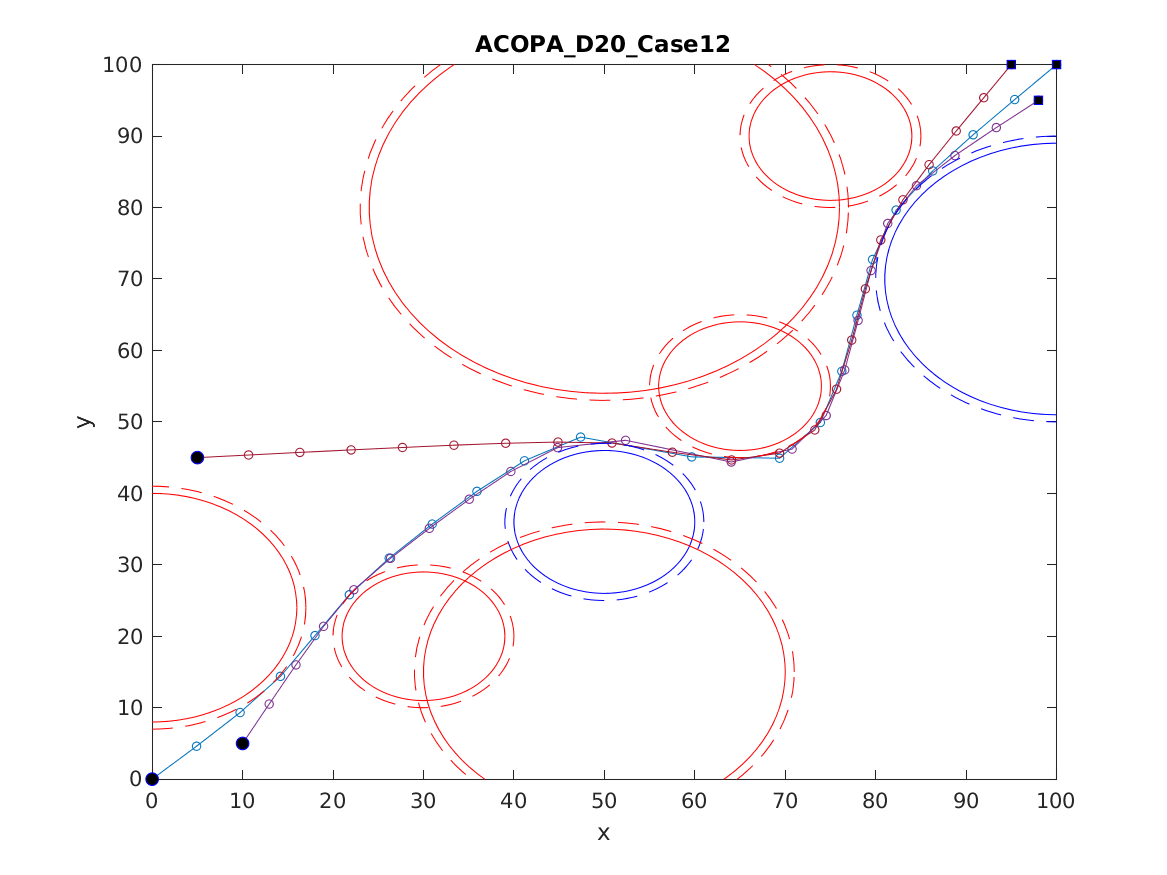
摘要:本文研究了无人地面车辆的路径规划,基于全局路径生成最优路径。提出的算法应用于D*Lite和横向避让算法。该算法用于全局地图和障碍物搜索。通过自主车辆的速度提出了安全避让路径规划思路。根据速度进行安全障碍物避让。当前的自动驾驶车辆在驾驶研究中具有安全性和可靠性。本文中,自动驾驶车辆作为逃避横向避让D*Lite算法的一种方式被使用。根据车辆速度进行光学横向避让控制,以便生成路径。所提出的研究是无人地面车辆驾驶研究中探索和避免无限路径上未知障碍物的一部分。
关键词:无人车辆 路径规划 全局路径 横向避让 D* Lite
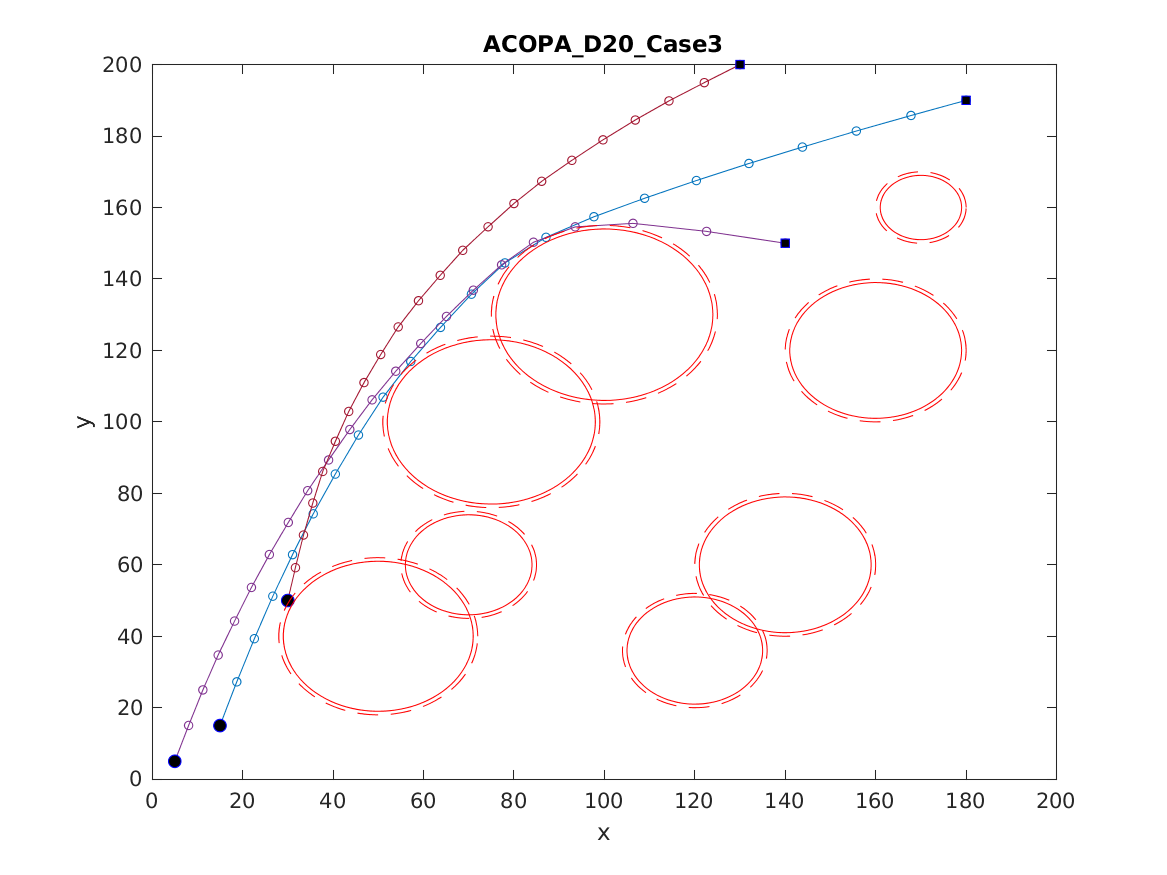
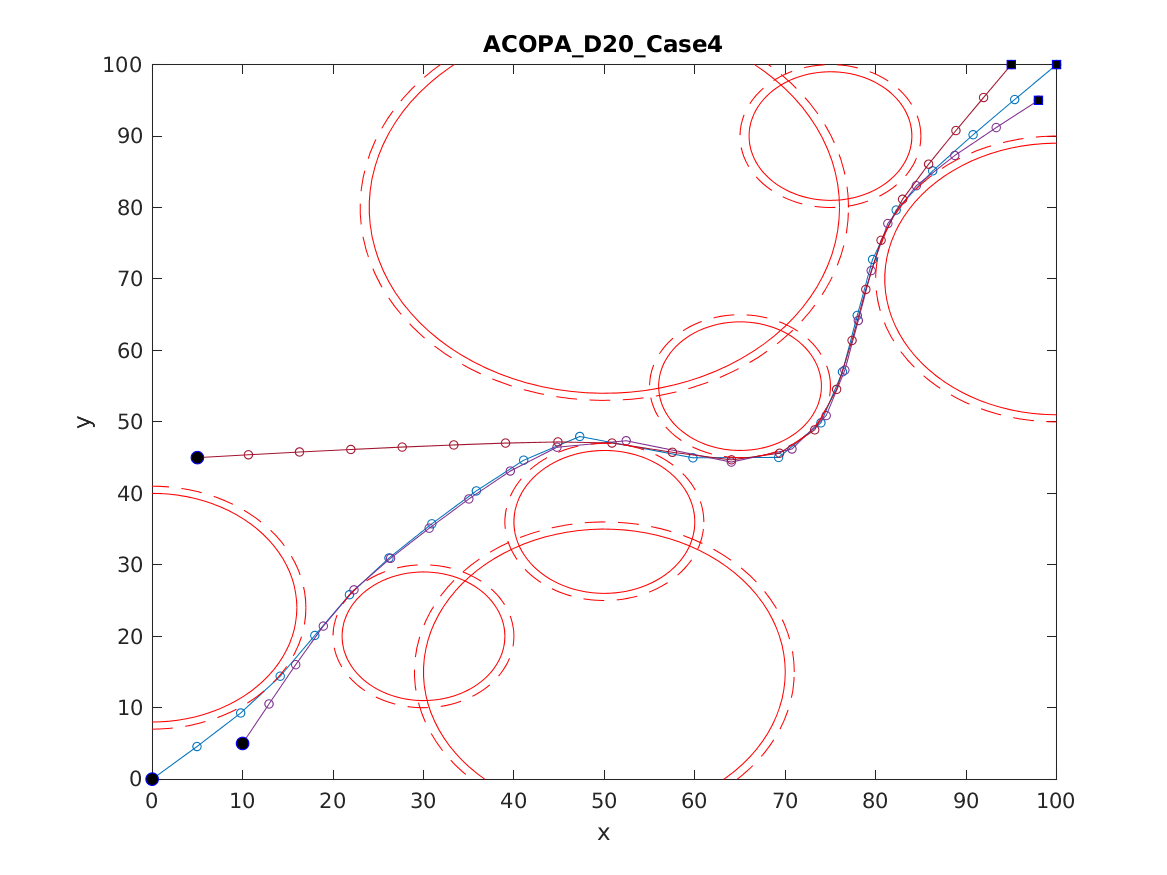
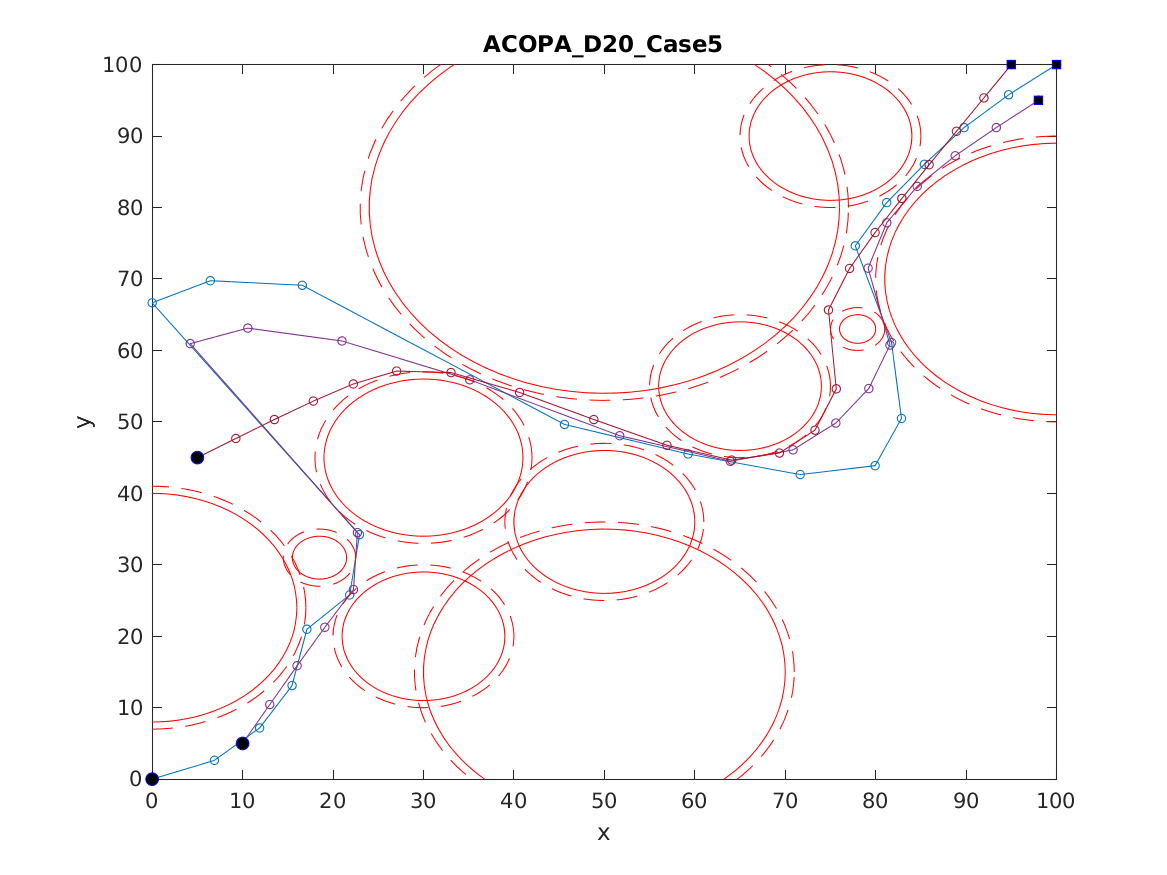
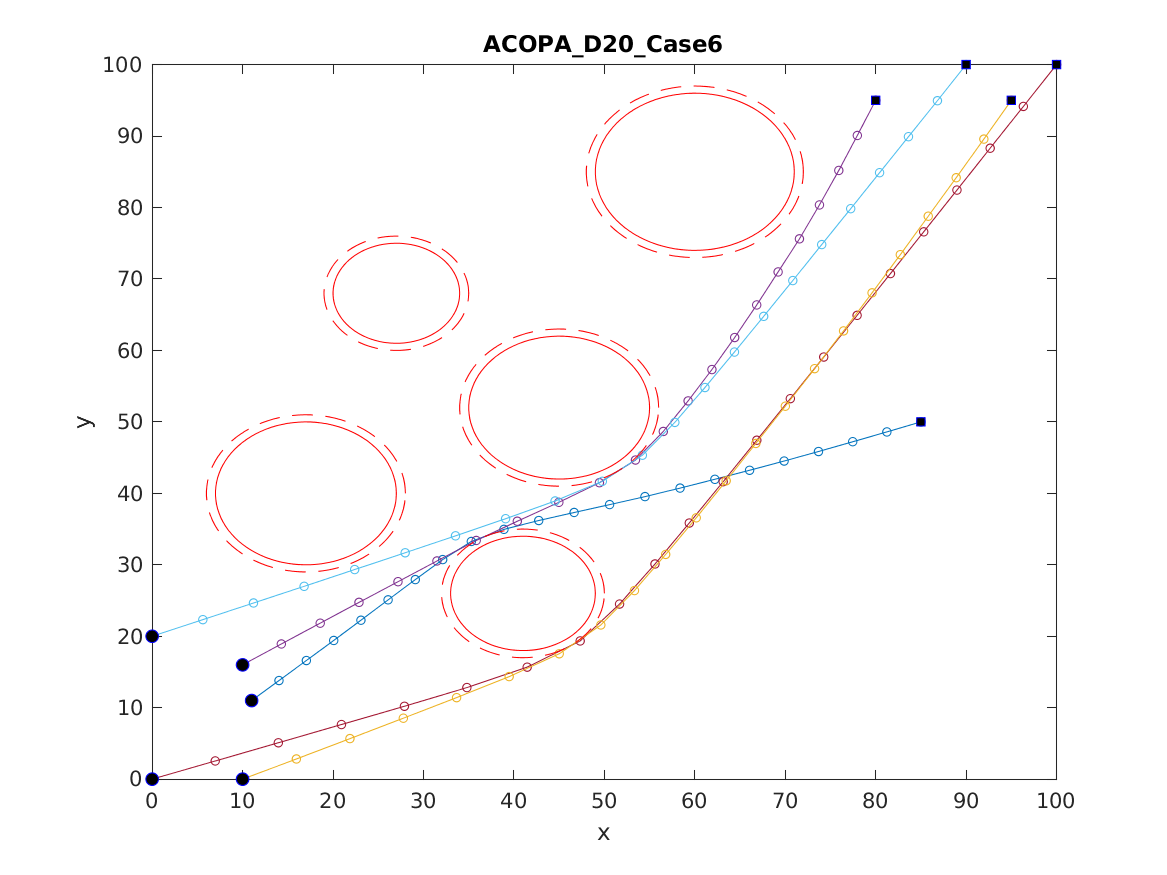
📚2 运行结果
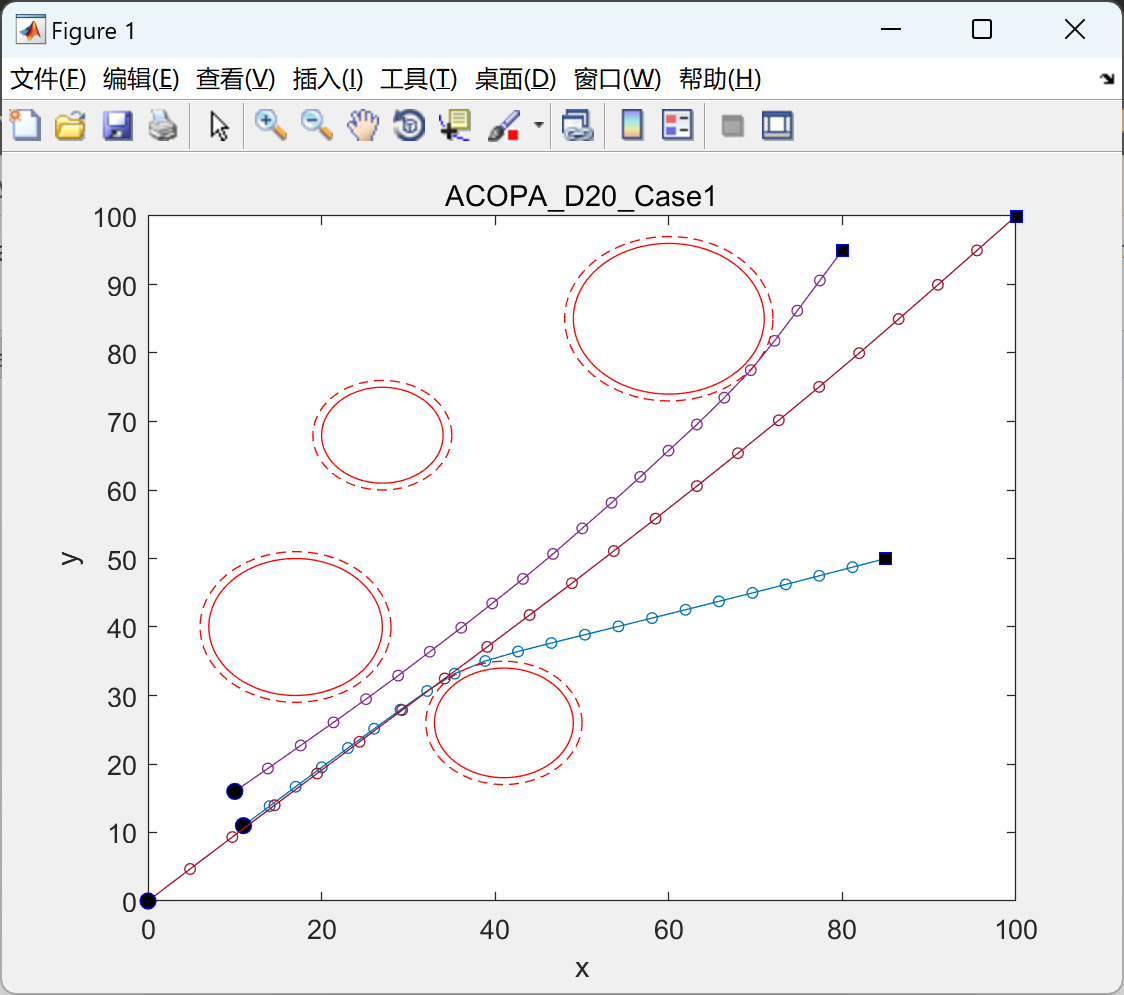
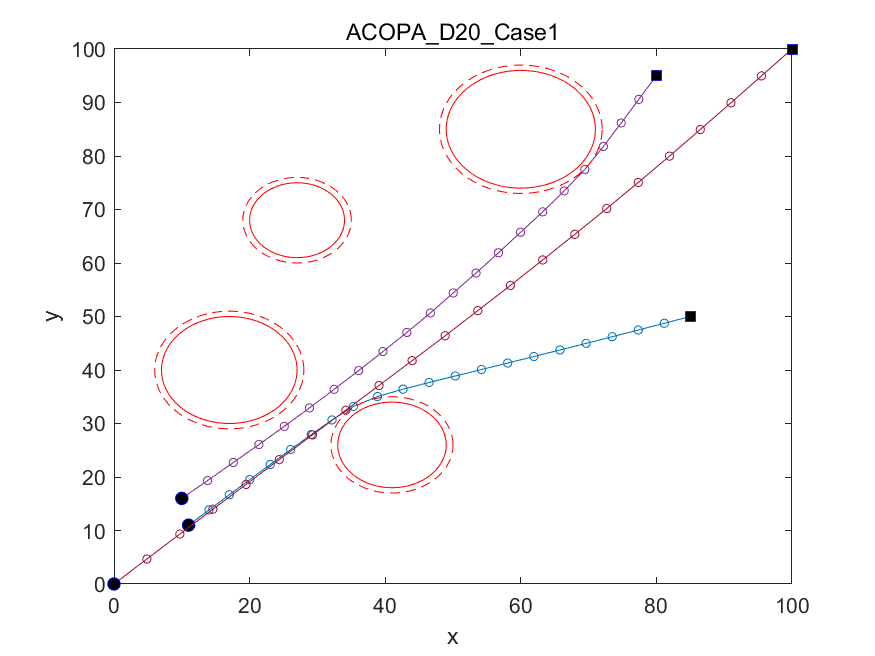
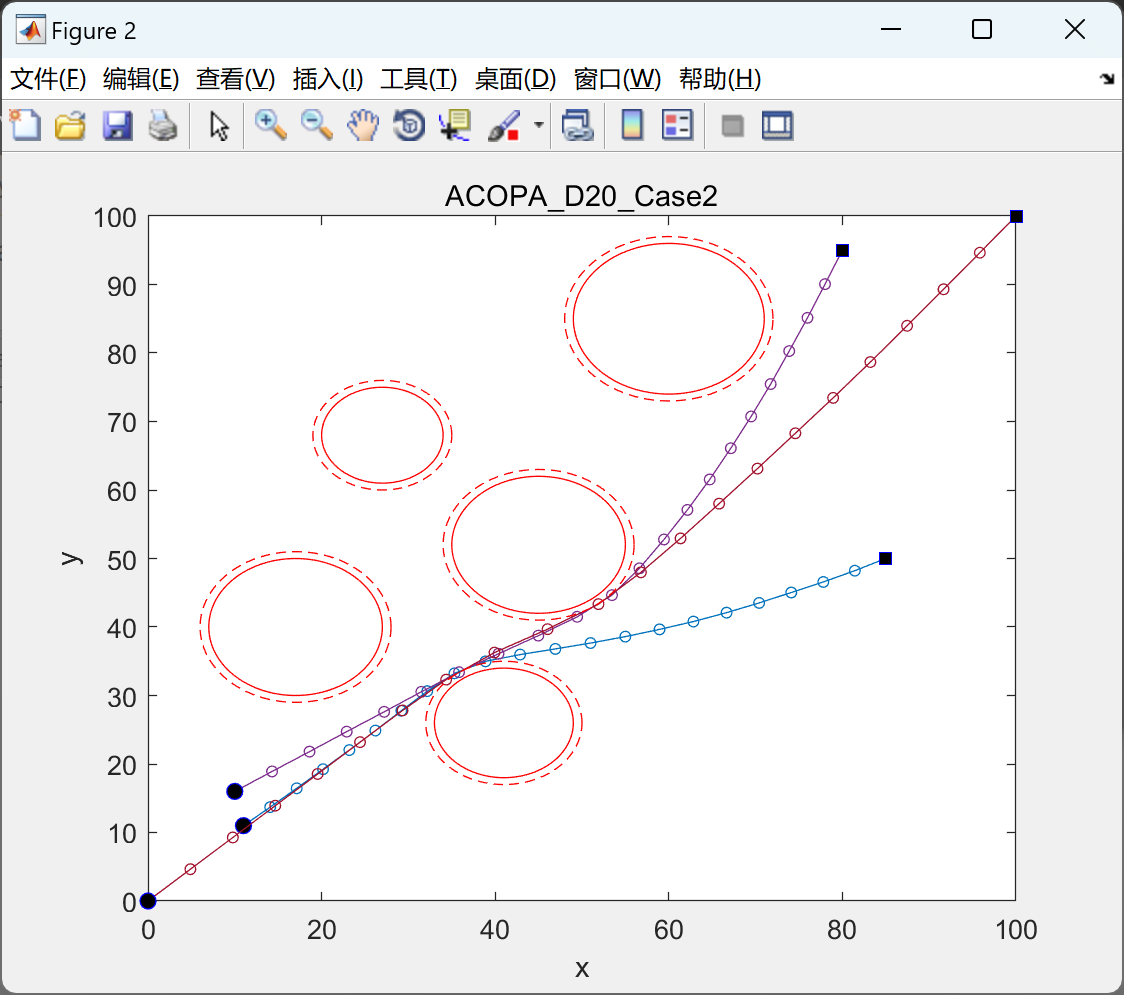
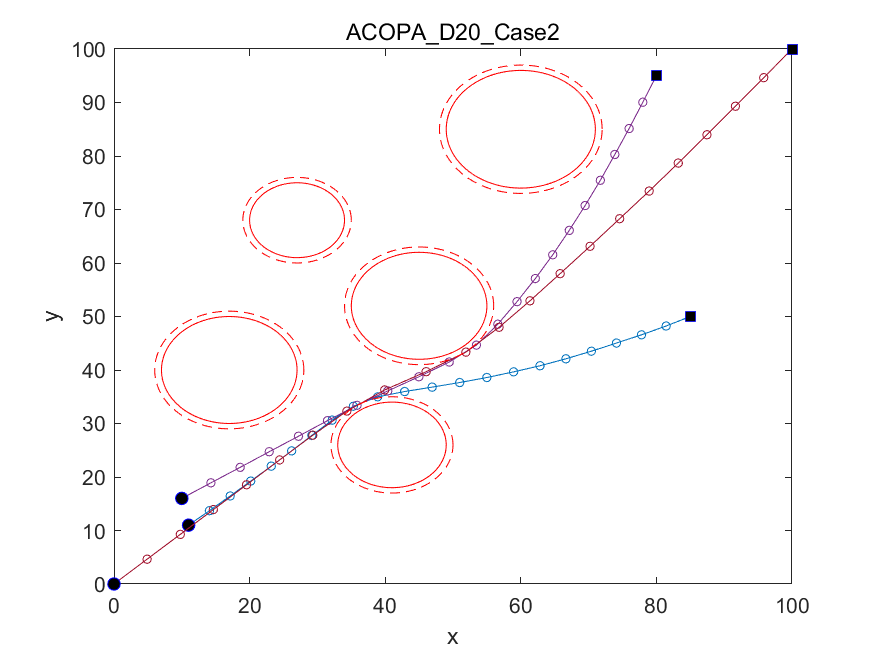
以下结果图去掉Matlab图框。
部分代码:
% ACOPA for path planning
function [TGbest, TGbestValue, FEvBestFitness]= ACOPA (MaximumFEs, SwarmSize, InitPos, ModelInfor, pRepair)
flag_restart=1;
zeta=0.6;
q=0.2;
win=10;
AgentIndex=1;
eval_agent(AgentIndex)=1; % fitness values evaluations (FEs) count for each robot(agent)
TModelInfor=CordinateTransformation(ModelInfor, AgentIndex); % thansfer the coordinate system
TaskNumber=TModelInfor.TaskNumber; % number of tasks/robots
...
for Dimension=[20 ] % the number of waypoints 20 30 40 60
for Task=1:12 % 1:12
%% Path plannning
mainPathPlanning (Dimension, Task)
%% Multi-agent coordination
mainMultiagentCoordination (Dimension, Task)
%% plot
pathplot (Dimension, Task)
end
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。

https://xueshu.baidu.com/usercenter/paper/show?paperid=95f501ad853c30970c0ee163a11dab95&site=xueshu_se&hitarticle=1
















 285
285

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









