







如果想要通过发布力和力矩控制全驱无人机,那么就需要发布三个方向的力矩和三个方向的力,总共六个控制量,而对于默认原版的actuator_control消息,其中只有四个控制量,因此需要进行修改。具体修改流程如下:
一、修改UORB消息
在msg文件夹下对actuator_controls.msg文件进行修改,增添三方向力参数,分别命名为INDEX_X_THRUST、INDEX_Y_THRUST、INDEX_Z_THRUST,控制通道数由8改为11
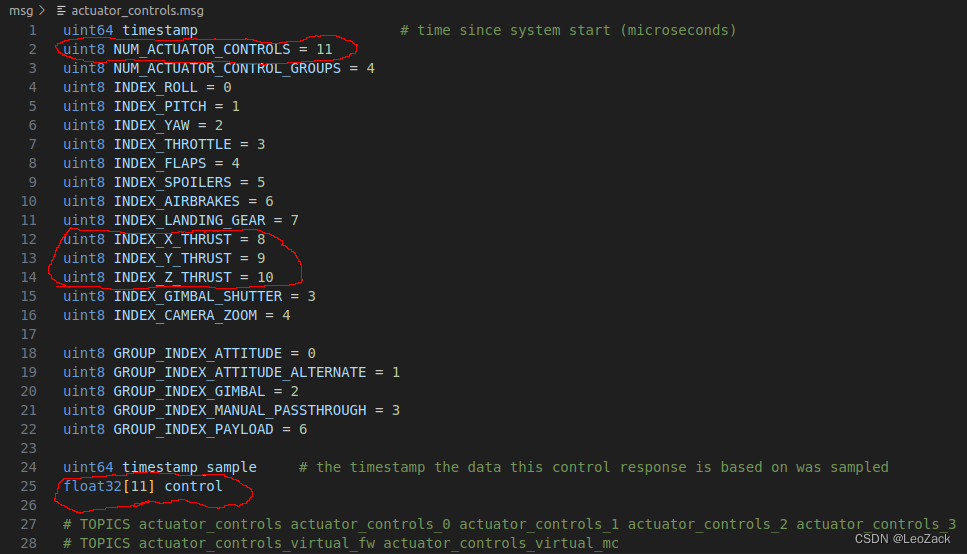
修改完成后编译,会生成对应.h头文件
make px4_sitl gazebo二、修改MAVROS包
因为我们需要对MAVROS和MAVLINK包进行二次开发,因此这里不建议使用二进制安装,更推荐使用源码安装,安装步骤可参考我之前的博客:源码方式安装MAVROS包;如果是已经进行过二进制安装的,也建议将之前的包删除,避免不必要的麻烦。
在mavros_msg/msg文件夹下找到ActuatorControl.msg文件,将控制通道数由8改为11
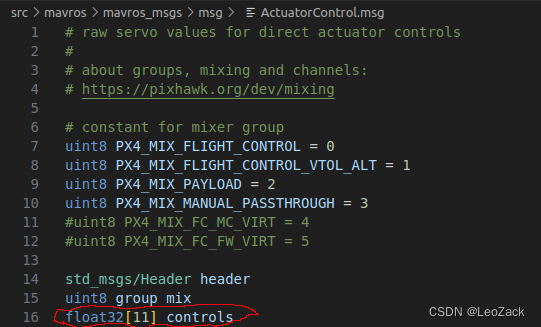
这里我们先不编译,等到修改MavLink包后一同编译
三、修改MAVLINK包
在mavlink/message_definition/v1.0/文件夹下找到common.xml文件,分别将“SET_ACTUATOR_CONTROL_TARGET”和“ACTUATOR_CONTROL_TARGET”这两块对应的控制通道数改为11
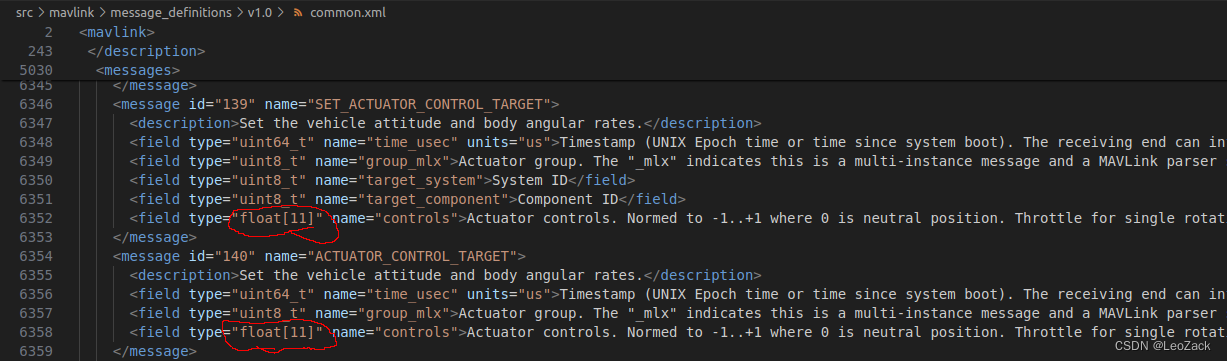
保存后进行编译
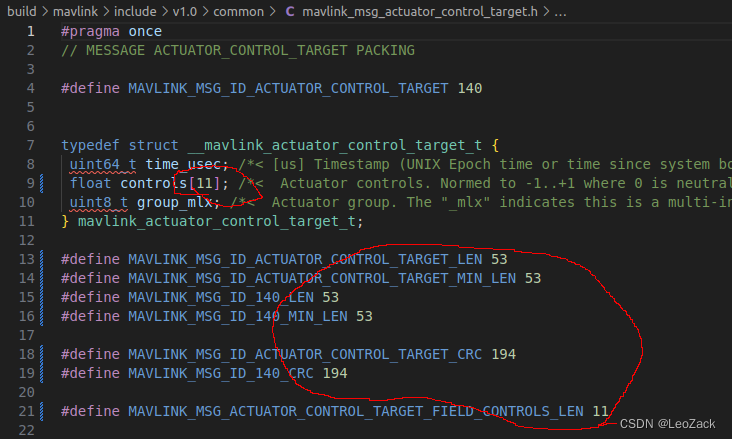
catkin build若修改成功,可以在build文件夹下找到mavlink_msg_actuator_control_target.h文件,检查通道数与一些其他参数是否发生改变;若发生改变,则说明修改成功
四、修改PX4/Firmware中的mavlink包
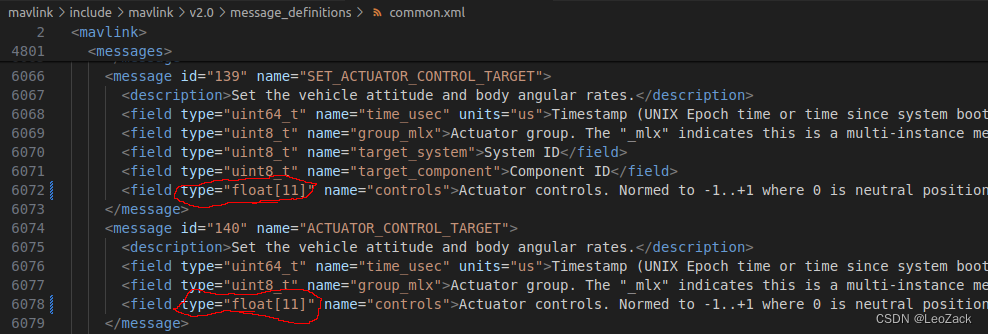
步骤同上,在mavlink/include/mavlink/v2.0/message_definition/文件夹下找到common.xml文件,分别将“SET_ACTUATOR_CONTROL_TARGET”和“ACTUATOR_CONTROL_TARGET”这两块对应的控制通道数改为11
 保存后,首先需要使用Mavlink Generator工具进行编译,可以在源码安装的mavlink包中找到mavgenerate.py文件,在命令行中输入
保存后,首先需要使用Mavlink Generator工具进行编译,可以在源码安装的mavlink包中找到mavgenerate.py文件,在命令行中输入
python3 mavgenerate.py即可运行Mavlink Generator工具
XML一栏选择~/Firmware/mavlink/include/mavlink/v2.0/message_definitions/standard.xml
输出一栏选择~/Firmware/mavlink/include/mavlink/v2.0
语言一栏选择 C
选择 2.0
勾选 Validate
点击 Generate 按钮
若修改成功,可以在mavlink/include/mavlink/v2.0/common文件夹下找到mavlink_msg_actuator_control_target.h文件,检查通道数与一些其他参数是否发生改变;若发生改变,则说明修改成功,注意此时与步骤三中最后生成的文件完成一致,若有部分参数不一致,说明修改失败

五、修改PX4/Firmware中的mavlink_receiver模块
在src/modules/mavlink文件夹下找到mavlink_receiver.cpp,对handle_message_set_actuator_control_target函数进行修改


六、修改参数ENABLE_LOCKSTEP_SCHEDULER
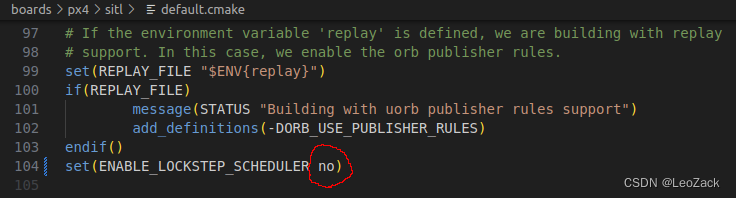
在boards/px4/sitl文件夹下找到default.cmake文件,修改参数ENABLE_LOCKSTEP_SCHEDULER为no
在对应模型的sdf文件中修改mavlink插件下的参数enable_lockstep为0

结束后再对整个固件进行编译
make px4_sitl gazebo七、测试
启动mavros仿真
roslaunch mavros_posix_sitl.launch运行自定义mavros程序,发布actuator_control数据,示例代码如下:
#! /usr/bin/env python
import rospy
import math
from geometry_msgs.msg import PoseStamped
from mavros_msgs.msg import State, ActuatorControl
from mavros_msgs.srv import CommandBool, CommandBoolRequest, SetMode, SetModeRequest
current_state = State()
def state_cb(msg):
global current_state
current_state = msg
local_pos = PoseStamped()
def local_pos_cb(local_pos_msg):
global local_pos
local_pos = local_pos_msg
if __name__ == "__main__":
rospy.init_node("offb_force_py")
state_sub = rospy.Subscriber("mavros/state", State, callback = state_cb)
local_pos_sb = rospy.Subscriber("mavros/local_position/pose", PoseStamped, callback = local_pos_cb)
local_pos_pub = rospy.Publisher("mavros/setpoint_position/local", PoseStamped, queue_size=10)
ActuatorControl_pub = rospy.Publisher("mavros/actuator_control", ActuatorControl, queue_size=10)
rospy.wait_for_service("/mavros/cmd/arming")
arming_client = rospy.ServiceProxy("mavros/cmd/arming", CommandBool)
rospy.wait_for_service("/mavros/set_mode")
set_mode_client = rospy.ServiceProxy("mavros/set_mode", SetMode)
# Setpoint publishing MUST be faster than 2Hz
rate = rospy.Rate(250)
# Wait for Flight Controller connection
while(not rospy.is_shutdown() and not current_state.connected):
rate.sleep()
pose = PoseStamped()
pose.pose.position.x = 0
pose.pose.position.y = 0
pose.pose.position.z = 2
actuator_control = ActuatorControl()
actuator_control.group_mix = 0
actuator_control.controls[0] = 0.000 # ROLL
actuator_control.controls[1] = 0.000 # PITCH
actuator_control.controls[2] = 0.000 # YAW
actuator_control.controls[3] = 0.824 # THROTTLE
actuator_control.controls[4] = 0.0 # FLAPS
actuator_control.controls[5] = 0.0 # SPOILERS
actuator_control.controls[6] = 0.0 # AIRBRAKES
actuator_control.controls[7] = -1.0 # LANDING_GEAR
actuator_control.controls[8] = 0.000 # X_THRUST
actuator_control.controls[9] = -0.00 # Y_THRUST
actuator_control.controls[10] = -0.824 # Z_THRUST
# actuator_control.header.seq = 1
# actuator_control.header.stamp = rospy.Time.now()
# actuator_control.header.frame_id = "test"
# Send a few setpoints before starting
for i in range(100):
if(rospy.is_shutdown()):
break
local_pos_pub.publish(pose)
ActuatorControl_pub.publish(actuator_control)
rate.sleep()
offb_set_mode = SetModeRequest()
offb_set_mode.custom_mode = 'OFFBOARD'
arm_cmd = CommandBoolRequest()
arm_cmd.value = True
last_req = rospy.Time.now()
count = 0
take_off = False
reach_height = False
while(not rospy.is_shutdown()):
if(current_state.mode != "OFFBOARD" and (rospy.Time.now() - last_req) > rospy.Duration(2.0)):
if(set_mode_client.call(offb_set_mode).mode_sent == True):
rospy.loginfo("OFFBOARD enabled")
last_req = rospy.Time.now()
else:
if(not current_state.armed and (rospy.Time.now() - last_req) > rospy.Duration(2.0)):
if(arming_client.call(arm_cmd).success == True):
rospy.loginfo("Vehicle armed")
take_off = True
last_req = rospy.Time.now()
if(count == 0 and not reach_height):
local_pos_pub.publish(pose)
if(math.fabs(local_pos.pose.position.z - 2) <= 0.3):
reach_height = True
rospy.loginfo("Reach Height!")
count = 1
elif(take_off and count == 1):
actuator_control.header.stamp = rospy.Time.now()
ActuatorControl_pub.publish(actuator_control)
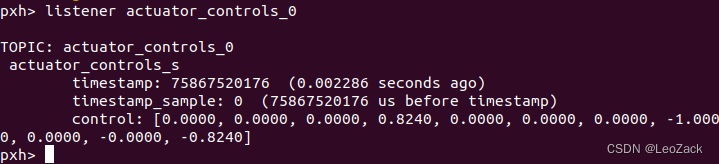
rate.sleep()在mavros仿真窗口中输入
listener actuator_controls_0可以看到如下结果,说明修改成功



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











