







一、卡尔曼滤波(Kalman Filter):动态系统的状态估计神器
1. 基本原理
卡尔曼滤波是一种递归状态估计算法,通过融合预测模型和观测数据,实时更新动态目标的状态(如位置、速度、加速度)。其核心思想是利用系统的状态转移方程和观测方程,最小化估计误差的协方差。
纯靠自学!4小时我居然就搞懂了卡尔曼滤波deepsort!不愧是计算机博士,草履虫都能学会的目标追踪实战!—人工智能/matlab/卡尔曼滤波器
2. 数学模型与工作流程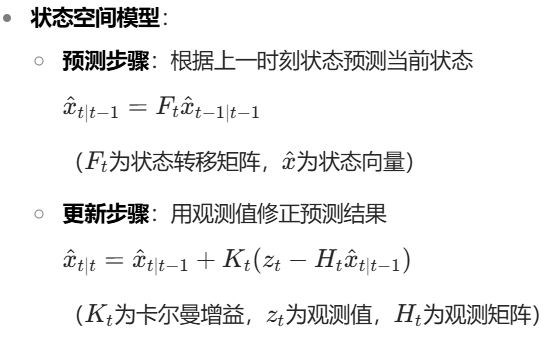
直观类比:类似天气预报,结合历史趋势(预测)和当前观测(气象数据)得到更准确的估计。
3. 目标跟踪中的应用
- 优势:
- 高效处理线性系统的噪声干扰,对目标运动进行平滑预测。
- 计算量小,适合实时场景(如视频监控、自动驾驶)。
二、DeepSORT:从 SORT 到深度学习增强的目标跟踪
1. SORT(Simple Online and Realtime Tracking)的局限
- 核心思想:基于 IOU(交并比)匹配前后帧的检测框,结合卡尔曼滤波预测目标运动。
- 缺点:当目标长时间遮挡或外观变化时,容易因匹配失败导致 ID 切换(ID Switching)。
2. DeepSORT 的改进:引入深度特征
-
架构升级:
- 特征提取:使用 CNN(如 ResNet)提取目标的外观特征(如颜色、纹理、形状)。
- 级联匹配:优先匹配最近出现的目标,减少遮挡导致的 ID 混乱。
- 运动模型:继承卡尔曼滤波的状态预测,处理目标的动态变化。
-
匹配策略:
- 运动匹配:基于卡尔曼滤波预测的位置计算 IOU。
- 外观匹配:计算深度特征的余弦距离,双重约束提升匹配准确率。
三、卡尔曼滤波在 DeepSORT 中的核心作用
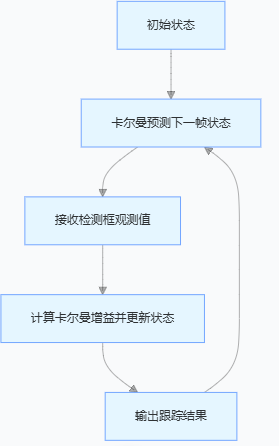
1. 状态预测与更新流程
graph TD
A[初始状态] --> B[卡尔曼预测下一帧状态]
B --> C[接收检测框观测值]
C --> D[计算卡尔曼增益并更新状态]
D --> E[输出跟踪结果]
E --> B2. 具体应用场景
-
目标运动建模:
- 对匀速或匀加速运动的目标(如行驶车辆、行人),通过状态转移矩阵预测位置。
- 示例:车辆在视频中每一帧的位置变化可近似为线性运动,卡尔曼滤波可预测其下一帧位置。
-
处理检测缺失:
- 当目标被临时遮挡(检测框丢失)时,依靠卡尔曼滤波的预测结果维持跟踪,避免 ID 丢失。
四、DeepSORT 与其他跟踪算法对比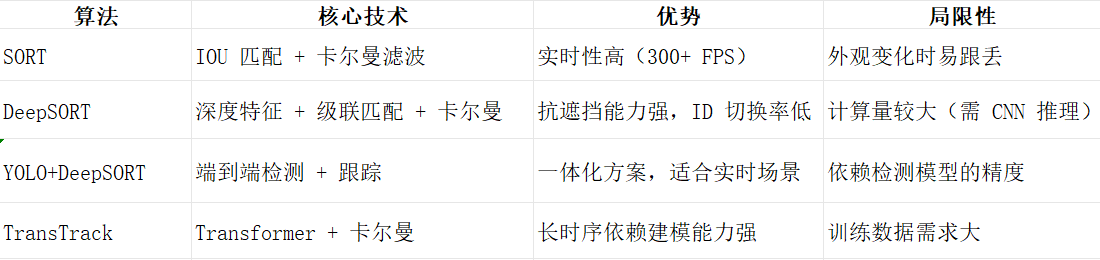
五、实战案例:行人跟踪系统的实现
1. 关键步骤
- 检测阶段:使用 YOLO 或 Faster R-CNN 获取行人检测框。
- 特征提取:通过预训练的 ResNet 提取行人外观特征(维度通常为 128 维)。
- 卡尔曼滤波:预测行人下一帧位置,更新状态向量。
- 匹配过程:
- 计算预测位置与检测框的 IOU(运动匹配)。
- 计算外观特征的余弦距离(外观匹配)。
- 利用匈牙利算法解决二分图匹配问题,分配跟踪 ID。
2. 代码示例(简化逻辑)
# 初始化卡尔曼滤波器
kf = KalmanFilter()
# 初始化跟踪器列表
trackers = []
# 深度特征提取器
feature_extractor = load_cnn_model()
while True:
frame = get_next_frame()
detections = detector(frame) # 获取检测框
# 1. 卡尔曼滤波预测所有跟踪器的状态
for tracker in trackers:
tracker.predict()
# 2. 提取检测框的外观特征
features = feature_extractor(frame, detections)
# 3. 计算运动匹配和外观匹配的成本矩阵
cost_matrix = compute_cost_matrix(trackers, detections, features)
# 4. 匈牙利算法匹配跟踪器与检测框
matches, unmatched_tracks, unmatched_dets = matching(cost_matrix)
# 5. 更新匹配的跟踪器
for track_idx, det_idx in matches:
trackers[track_idx].update(detections[det_idx], features[det_idx])
# 6. 删除长时间未匹配的跟踪器
for track_idx in unmatched_tracks:
if trackers[track_idx].age > max_age:
trackers.pop(track_idx)
# 7. 初始化新检测到的目标
for det_idx in unmatched_dets:
new_tracker = DeepSORTTracker(detections[det_idx], features[det_idx], kf)
trackers.append(new_tracker)六、技术挑战与发展趋势
1. 现存挑战
- 计算效率:深度特征提取需 GPU 加速,难以部署在嵌入式设备(如无人机、手机)。
- 复杂场景:多目标密集交互、快速运动、外观相似目标(如双胞胎)易导致跟踪混乱。
- 实时性与精度平衡:高帧率场景下(如 120 FPS 视频),需优化卡尔曼滤波参数减少误差累积。
2. 前沿方向
- 轻量化特征提取:使用 MobileNet、ShuffleNet 等轻量级网络压缩模型体积。
- 多传感器融合:结合雷达、红外图像提升低光照或遮挡场景的鲁棒性。
- 无监督 / 自监督学习:减少对大规模标注数据的依赖,适应跨场景跟踪。
七、应用场景
- 智能交通系统:车辆流量统计、违章行为检测(如压实线、逆行)。
- 安防监控:人群异常行为识别(如聚集、奔跑)、目标轨迹分析。
- 人机交互:手势跟踪、虚拟现实(VR)中的人体动作捕捉。
- 自动驾驶:多目标跟踪(车辆、行人、障碍物)辅助路径规划。
总结
卡尔曼滤波与 DeepSORT 的结合,实现了动态目标跟踪中 “运动预测” 与 “外观识别” 的优势互补。卡尔曼滤波通过数学建模解决目标的动态估计问题,而 DeepSORT 通过深度学习增强外观特征的区分能力,两者共同推动了目标跟踪技术在复杂场景下的实用化。未来,随着边缘计算技术和轻量化模型的发展,这一组合将在更多实时跟踪场景中发挥关键作用。

有以下论文写作问题的可以扫下方名片详聊
前沿顶会、期刊论文、综述文献浩如烟海,不知道学习路径,无从下手?
没时间读、不敢读、不愿读、读得少、读不懂、读不下去、读不透彻一篇完整的论文?
CVPR、ICCV、ECCV、ICLR、NeurlPS、AAAI……想发表顶会论文,找不到创新点?
读完论文,仍旧无法用代码复现……
然而,导师时常无法抽出时间指导,想写论文却无人指点…

















 859
859

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









