







transformer 架构如此强大,因为它不会在文本、图像或任何数据及其组合之间产生任何差异。“Attention” 模型计算序列中每个标记之间的自相似性,允许汇总和生成任何类型的数据。Vision Transformer 通过将图像分解为二次色块来实现这一点,然后将其展平为单个矢量嵌入。此时,可以像处理文本嵌入(或任何其他嵌入)一样处理它们,甚至可以与其他数据类型连接。通常,创建 patchs 的步骤与使用 2D 卷积的第一个可学习的非线性转换相结合,这可能很难解包。本文将深入探讨这一步。本文的编写目的是,您可以通过将代码片段复制并粘贴到 colab 工作表中来进行作。
数据
我们将使用 MNIST 数据集,这是一组手写数字,通常用于训练基本图像分类器。MNIST 镜像在 Torch 中可用,并且可以方便地使用 DataLoader 类加载:
from torchvision.datasets.mnist import MNIST
from torch.utils.data import DataLoader
import torchvision.transforms as T
import torch
torch.manual_seed(42)
img_size = (32,32) # We will resize MNIST images to this size
batch_size = 4
transform = T.Compose([
T.ToTensor(),
T.Resize(img_size)
])
train_set = MNIST(
root="./../datasets", train=True, download=True, transform=transform
)
train_loader = DataLoader(train_set, shuffle=True, batch_size=batch_size)
batch = next(iter(train_loader)) # loads the first batch
该代码下载 MNIST 数据集,提供 Torch 转换,将图像转换为 Torch 张量并将其大小调整为 32x32。然后,我们使用 DataLoader 类加载一批 batch_size = 4 张图像。我们使用 torch.manual_seed 将随机生成器初始化为相同的值,从而允许您在笔记本中看到与此处相同的图像。
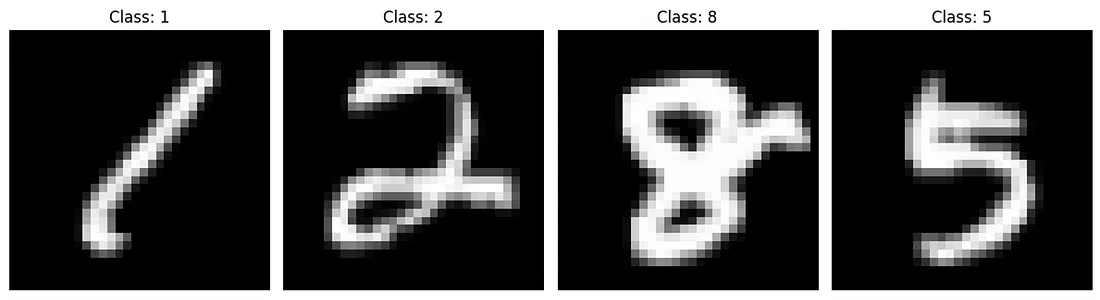
您可以使用 matplotlib 可视化由四个图像和四个标签组成的批处理:
import matplotlib.pyplot as plt
# batch[0] contains the images and batch[1] the labels
images = batch[0]
labels = batch[1]
# Create a figure and axes for the subplots
fig, axes = plt.subplots(1, batch_size, figsize=(12, 4))
# Iterate through the batch of images and labels
for i in range(batch_size):
# Convert the image tensor to a NumPy array and remove the channel dimension if it's a grayscale image
image_np = images[i].numpy().squeeze()
# Display the image in the corresponding subplot
axes[i].imshow(image_np, cmap='gray') # Use 'gray' cmap for grayscale images
axes[i].set_title(f"Class: {labels[i].item()}") # Assuming labels are tensors, use .item() to get the value
axes[i].axis('off')
# Adjust the spacing between subplots
plt.tight_layout()
# Display the plot
plt.show()
创建映像修补程序
使用 Transformer 神经网络处理图像时,第一步是将其分解为多个块。在这种情况下,我们可以将 32x32 图像分成 64 个 4x4 (16) 块、16 个 8x8 (64) 块或 8 个 16x16 (256) 页面:
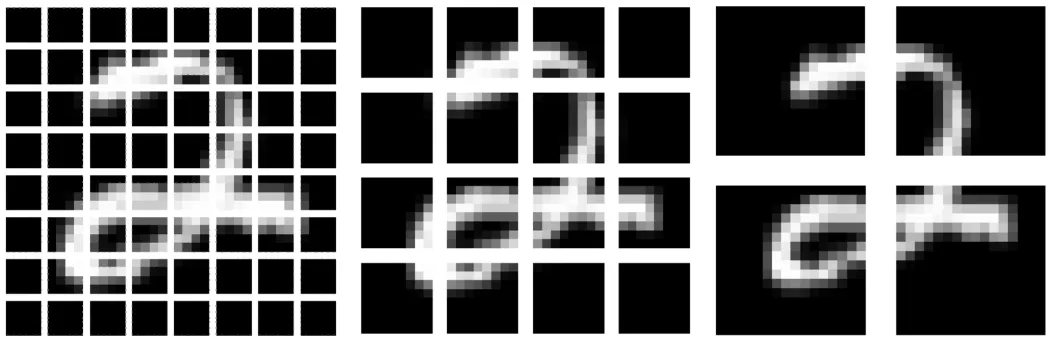
虽然我们以二次形式显示这些补丁,但我们也可以将它们存储在维数为 16、64 或 256 的列向量中。此时,它们已经与文本嵌入无法区分,并且它们的序列就像一串字符或单词一样。
以下是使用 Torch 的 unfold 运算符将图像分开的代码:
import torch
import torch.nn as nn
import matplotlib.pyplot as plt
import numpy as np
# Image and patch sizes
img_size = (32, 32)
patch_size = (8, 8)
n_channels = 1
image = batch[0][1].unsqueeze(0)
# Patch Class
class Patch(nn.Module):
def __init__(self, img_size, patch_size, n_channels):
super().__init__()
self.patch_size = patch_size
self.n_channels = n_channels
def forward(self, x): # B x C x H X W
x = x.unfold(
2, self.patch_size[0], self.patch_size[0]
).unfold(
3,self.patch_size[1],self.patch_size[1]
) # (B, C, P_row, P_col, P_height, P_width)
x = x.flatten(2) #(B, C, P_row*P_col*P_height*P_width)
x = x.transpose(1, 2) # (B, P_row*P_col*P_height*P_width, C)
return x
# Instantiate model
patch = Patch(img_size, patch_size, n_channels)
# Extract patches
with torch.no_grad():
patches = patch(image)
# Visualize
patches = patches.squeeze(0) # Remove batch dimension -> (P, d_model)
patches = patches.view(-1, patch_size[0], patch_size[1]) # reshape back into 8x8
npatches = img_size[0] // patch_size[0]
# Plot patches
fig, axs = plt.subplots(npatches, npatches, figsize=(6, 6)) # 4x4 grid for (32x32) -> 16 patches
for i in range(npatches):
for j in range(npatches):
patch_idx = i * npatches + j # Patch index
axs[i, j].imshow(patches[patch_idx], cmap="gray", vmin=0, vmax=1)
axs[i, j].axis("off")
plt.show()
该作像往常一样发生在我们从 nn 派生的 Patch 类的 forward 方法中。模块,通过先沿高度维度展开,然后沿宽度维度展开来作。所有作都在注释中显示它们的维度,其中 B 代表批处理,C 代表通道数(在本例中为 1),H 代表高度,W 代表宽度。展开后,我们从存储图像数据的第二维开始展平张量,最后转置它,使颜色通道排在最后。
代码的其余部分实例化该类,转换图像并对其进行可视化。请注意,我们需要删除批量维度,然后将 1D 图像数据转换回 2D 张量才能正确显示它们。
创建 Patch 嵌入
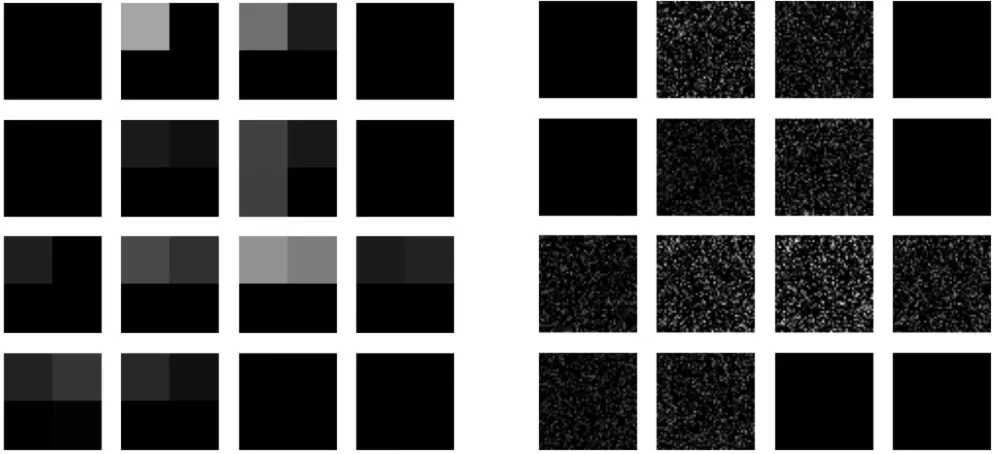
您可能已经注意到,这种方法在某种程度上将嵌入的维度限制为原始图像维度的倍数。这可以通过使用线性投影进行展开作来更改,从而创建可学习的嵌入。
此外,这些嵌入已转换回 2D 张量以进行可视化,并说明了线性项目如何按补丁运行。初始化 nn.以单位矩阵为权重的线性类显示原始数据被保留。使用随机权重,我们可以看到图像中值为零的部分保持不变。最后,我们可以添加一个偏差项来表明转换确实对每个 patch 的影响相同 — 所有空 patch 都显示完全相同的偏差。
这是新类,现在称为 PatchEmbedding,并带有一行代码来实例化它。请注意,我们引入了新的变量 d_model,这是输出嵌入的所需维数。现在可以是任何数字。我们在这里选择了 d_model=64,因为这是上图的设置,但不再有限制。

class PatchEmbedding(nn.Module):
def __init__(self, img_size, patch_size, n_channels, d_model):
super().__init__()
self.patch_size = patch_size
self.n_channels = n_channels
self.d_model = d_model
# Linear projection layer to map each patch to d_model
self.linear_proj = nn.Linear(patch_size[0] * patch_size[1] * n_channels, d_model,bias=False)
# The next two lines are unnecessary, but help to visualize that the linear
# projection operates along the correct dimensions
#with torch.no_grad():
# self.linear_proj.weight.copy_(torch.eye(self.linear_proj.weight.shape[0]))
def forward(self, x): # B x C x H X W
x = x.unfold(
2, self.patch_size[0], self.patch_size[0]
).unfold(
3,self.patch_size[1],self.patch_size[1]
) # (B, C, P_row, P_col, P_height, P_width)
B, C, P_row, P_col, P_height, P_width = x.shape
x = x.reshape(B,C,P_row*P_col,P_height*P_width)
x = self.linear_proj(x) # (B*N, d_model)
x = x.flatten(2) #(B, C, P_row*P_col*P_height*P_width)
x = x.transpose(1, 2) # (B, P_row*P_col*P_height*P_width, C)
x = x.view(B, -1, self.d_model)
return x
d_model = 64
# Instantiate model
patch = PatchEmbedding(img_size, patch_size, n_channels, d_model)
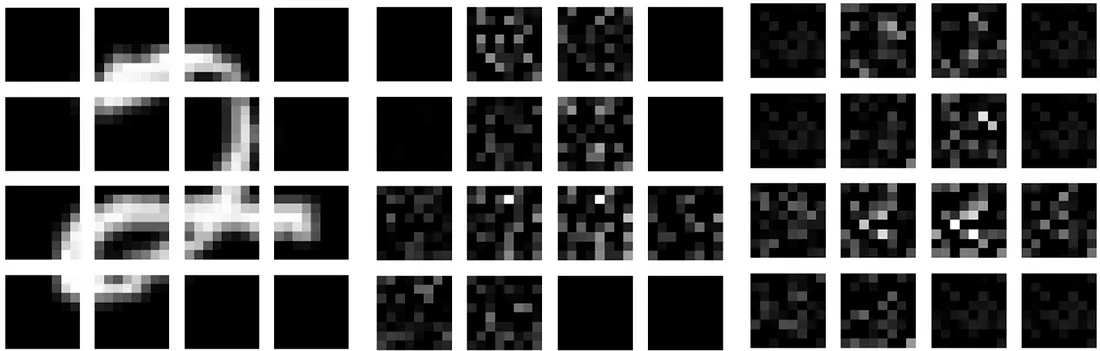
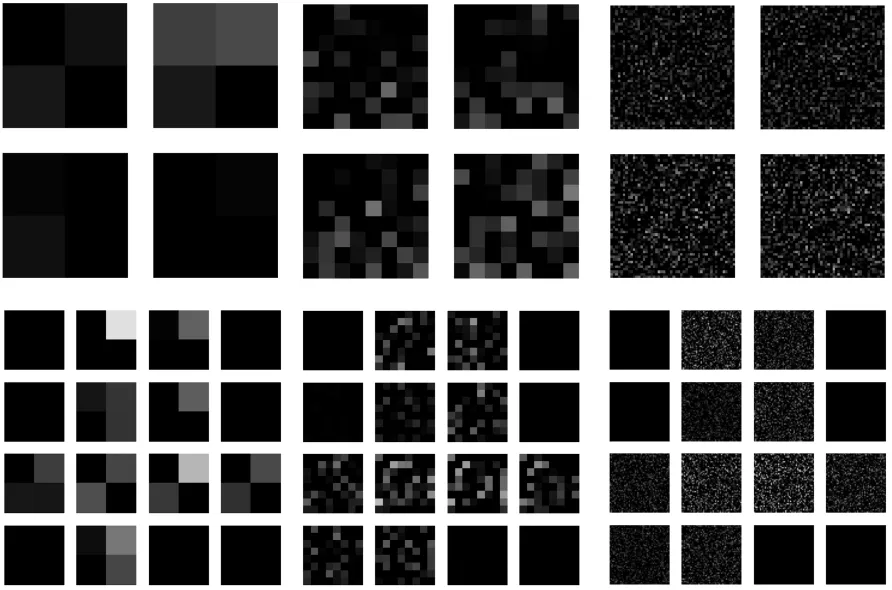
事实上,只要维度是二次的,我们仍然可以可视化结果,如下所示 d_model=2 和 d_model=2500 的输出:
我们可以看到,非线性变换,一个完全连接的神经网络,它接受从 8x8 (64) 到 d_model 的输入,可以包含相当多的可学习参数,从左侧的 64x4 (256) 到右侧的 64x2500 (160k)。您可以使用
def count_parameters(model):
返回 sum(p.numel() for p in model.参数 () 如果 p.requires_grad)count_parameters
(补丁)
使用 2D 卷积创建 Patch Embeddings
您可能已经注意到,展开运算符非常笨拙,如果不是完全令人讨厌的话。有一种更简单的方法可以将展开和线性变换结合起来,即使用与所需补丁大小相对应的内核大小和步幅长度执行 2D 卷积。这样,卷积不会逐个像素地作,而是逐个补丁地作,从而产生与 unfold 与 nn 组合时相同的结果。线性:
这是修改后的 PatchEmbedding 类:
类 PatchEmbedding(nn.模块):
def __init__(self, img_size, patch_size, n_channels, d_model):
super().__init__()
self.patch_size = patch_size
self.n_channels = n_channels
self.d_model = d_model # 扁平化的补丁大小
# Conv2d 提取补丁
self.linear_project = nn.Conv2d(
in_channels=n_channels,
out_channels=self.d_model, # 每个补丁被展平为d_model
kernel_size=patch_size,
stride=patch_size,
bias=False
) def
forward(self, x):
x = self.linear_project(x) # (B, d_model, P_row, P_col)
x = x.flatten(2) # (B, d_model, P_row * P_col) -> (B, d_model, P)
x = x.transpose(1, 2) # (B, P, d_model)
返回 x
请注意,您可以将上述任何 patch 嵌入馈送到 vision transformer。使用 2D 卷积来执行此作是最通用和最紧凑的表示形式。请注意,卷积每个维度使用一个专用内核,而到目前为止,我们一直对每个补丁使用相同的内核。
我们可以说明这一点,并通过初始化其内核权重来测试卷积不会做任何有趣的事情,以便每个内核每个补丁只提取一个像素。下面的代码适用于补丁大小 (8,8) 和结果d_model=64。将其添加到 PatchEmbedding 类的 __init__ 方法的末尾:
"""Initialize Conv2d to extract patches without transformation."""
with torch.no_grad():
identity_kernel = torch.zeros(
self.d_model, self.n_channels, *self.patch_size
) # Shape: (64, 1, 8, 8)
for i in range(self.d_model):
row = i // self.patch_size[1] # Row index in the patch
col = i % self.patch_size[1] # Column index in the patch
identity_kernel[i, 0, row, col] = 1 # Place a 1 at the correct pixel position
self.linear_project.weight.copy_(identity_kernel)
如您所见,identity_kernel张量维护d_model条目,每个维度一个条目,并且每个补丁只有一个像素设置为 1,因此仅提取该像素。一种更简单的方法是简单地将 d_model x d_model 单位矩阵转换为 d_model patch_size 矩阵:
identity_matrix = torch.eye(self.d_model)
identity_kernel = identity_matrix.view(d_model, 1, *patch_size) # Shape: (64, 1, 8, 8)
with torch.no_grad():
self.linear_project.weight.copy_(identity_kernel)
两种方法都有相同的结果,但第一种方法更清楚地说明了实际发生的情况:每个内核都是一个 0 矩阵,只有一个条目是 1。
无论您是使用线性变换还是小内核集合,两者都具有相同数量的参数。您可以通过检查两个 patch 嵌入的数据结构来了解这一点:
PatchEmbedding(
(linear_proj): 线性(in_features=64, out_features=64, bias=False)
)
PatchEmbedding(
(linear_project): Conv2d(1, 64, kernel_size=(8, 8), stride=(8, 8), bias=False)
)
其中一个只是 64x64 矩阵(4096 个参数)。另一个由 64 个 8x8 矩阵组成,也由 4096 个参数组成。
了解了将图像分解为补丁嵌入序列的不同方式后,您现在可以通过 transformer 编码器(也称为 “vision transformer”) 运行它们:
有以下论文写作问题的可以扫下方名片加老师详聊
前沿顶会、期刊论文、综述文献浩如烟海,不知道学习路径,无从下手?
没时间读、不敢读、不愿读、读得少、读不懂、读不下去、读不透彻一篇完整的论文?
CVPR、ICCV、ECCV、ICLR、NeurlPS、AAAI……想发表顶会论文,找不到创新点?
读完论文,仍旧无法用代码复现……
然而,导师时常无法抽出时间指导,想写论文却无人指点……

















 442
442

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









