




研究背景:聚焦微创手术痛点
微创手术(MIS)凭借缩短患者恢复时间、减少组织创伤的核心优势,已成为现代外科的主流方向,但临床应用中面临两大关键挑战:一是手术视野受限、触觉反馈不足,依赖内镜的2D视野难以精准定位器官结构(如血管、肿瘤);二是3D重建作为手术规划与导航的核心工具,存在数据稀缺、真值精度低、真实场景适配性差的问题 —— 现有公开数据集要么样本量小、要么缺乏解剖真实性,且传统3D重建方法在低纹理器官、复杂光照下精度不足。
伦敦大学研究团队以Kinova Gen3 7自由度机械臂为核心载体,提出针对性解决方案:
-
为机械臂适配腹腔镜与高分辨率相机,构建“机械臂 - 腹腔镜 - 成像” 一体化采集系统;
-
设计两种光照条件(模拟真实MIS的腹腔镜光源、用于基准对比的手术室overhead 光源)与三种运动轨迹(模拟临床的Trocar轨迹、覆盖更全面的Open-Close/Open-Far球形轨迹),采集多视角离体器官图像;
-
融合“基于学习的特征匹配算法+COLMAP三维重建工具”,实现高精度3D重建,并以激光扫描真值验证精度。
最终成果解决了MIS场景下3D重建的三大核心问题:一是提供了可控、可重复的多视角数据采集工具,缓解数据集稀缺困境;二是实现接近亚毫米级的重建精度(平均 RMSE1.05mm、Chamfer距离0.82mm),满足临床精度需求;三是适配真实 MIS手术场景(Trocar 轨迹、腹腔镜光源),提升技术落地可行性。
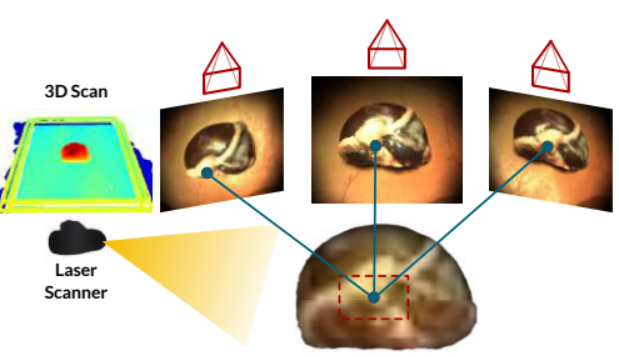
图1:本研究利用我们的机械臂平台采集的多视图图像进行3D重建。我们使用激光扫描仪获取地面实况数据进行对比。
核心方法:多技术融合保障重建精度与场景适配性
研究通过多维度技术创新,构建从“位姿生成 - 特征匹配 - 重建优化” 的完整 3D 重建链路,核心方法可分为五大模块:
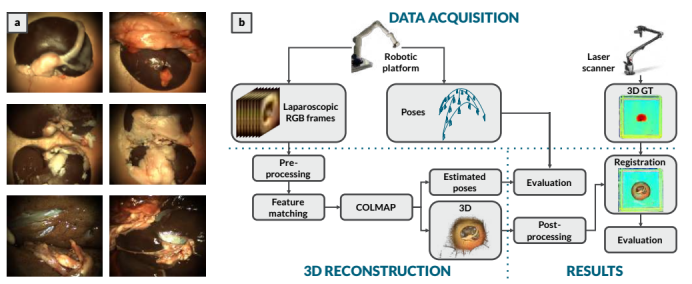
2。a) 来自6个器官样本集的RGB帧。第1<
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 422
422

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









