



研究背景:
在机器人领域,可变形物体操作(DOM)长期受无限自由度与非线性动力学挑战。塑料袋作为常见柔性物品,因半透明表面致深度传感失效、复杂构型下自遮挡及弹塑性材料建模难,是 DOM 领域的“硬骨头”。
传统基于 3D 视觉的点云或体素模型因深度误差失效,2D 关键点检测受严重遮挡限制,直接打结成功率不足 5%。
为解决上述难题,研究团队以 Kinova Gen3 双臂机器人为载体,提出迭代交互建模(IIM)方案:利用模仿学习将随机掉落的塑料袋调整至直立姿态,构建高置信度关键点骨架模型,结合空间动作图与图卷积网络,实现 85%打结成功率,首次赋予机器人自主打结随机构型塑料袋的能力。
核心方法:迭代交互建模(IIM)的技术框架
IIM方法的核心在于通过迭代抓取放置动作将塑料袋调整为站立姿势,从而建立高置信度的关键点骨架模型。
具体步骤包括:
-
视觉抓取模块:利用空间动作图从俯视图像中预测抓取点。
-
任务进度模块:使用图卷积网络评估调整过程中的关键点骨架,并决定下一步的动作。
-
迭代调整:通过不断抓取和放置塑料袋,逐步将其调整为站立姿势。
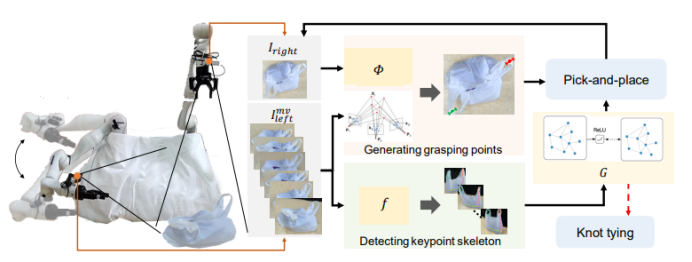
图3:打结塑料袋的IIM迭代。在每一步中,右摄像头都会获得自上而下的 视图图像Iright,左侧相机获取侧视图图像序列I 移动 左。我们使用空间 动作映射模块φ获取抓取点,并使用稀疏重建的点云获取 抓取深度。同时,我们从I中检测2D关键点 音乐视频 留下f来简化任务 进度模块G确定使用哪个拾取动作,以及调整姿势何时良好 足以支持构建3D关键点骨架来打结。
实验设计与验证:从基线对比到泛化测试
实验设置:
机械臂与末端执行器
双臂系统:采用两台 Kinova Gen3(6DoF)机械臂,基座间距 51.2cm,配备标准 Robotiq 2F-85 夹具,支持精准抓取与姿态调整。
抓取策略:单臂拾取动作(p1)与双臂协同拾取动作(p2)结合,p2仅在调整末期用于稳定直立姿态。

视觉感知模块
多相机配置:左机械臂末端安装 Intel Realsense D435i 相机(Cleft),通过 15 个不同侧视角度采集立体图像;右机械臂末端相机(Cright)提供顶视图,视野范围 75.4cm×56.6cm。
深度估计:利用 COLMAP 算法对Cleft的多视图图像进行稀疏重建,通过圆柱区域内顶 10 点平均高度确定抓取深度。
实验方案与结果分析
研究团队在四种不同的塑料袋上进行了实验,其中包括三种有演示的塑料袋和一种没有演示的新型塑料袋。
训练数据:每种塑料袋仅需 100 次演示(1.5 小时),包含白色、红色、黑色塑料袋,灰色塑料袋作为未演示泛化测试。

图 2:(a)本研究中使用的塑料袋和填充物。我们在白色、红色和黑色袋子上进行了演示。灰色塑料袋用于展示 IIM 的泛化能力。我们在塑料袋中装入了尺寸和形状各异的不同物品,包括布料、纸板、瓶子、胶带卷和干电池。(b)PBPose 数据集。图像拍摄于各种背景、打结状态、填充状态、光照条件、放置状态(直立或平躺)和视角下。(c)我们设计了两种运动基元用于在空中打结。
拾取与放置流程
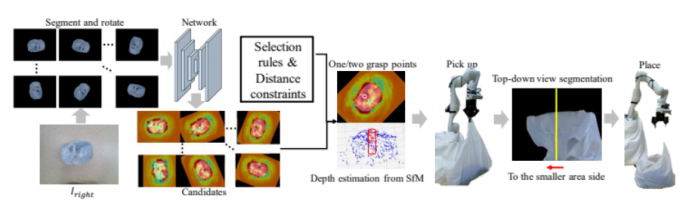
图 4:对 Iright 进行分割和旋转处理以获得 16 个副本。我们将这些图像输入网络 φ,并根据选择规则和距离约束从输出候选点中选择一个或两个抓取点。通过计算抓取点上方前 10 个点的深度来获取这些点的抓取深度,然后执行拾取动作。向上拾取后,我们通过分割顶视图来确定塑料袋的放置位置,并比较塑料袋左右两侧区域的相对大小。
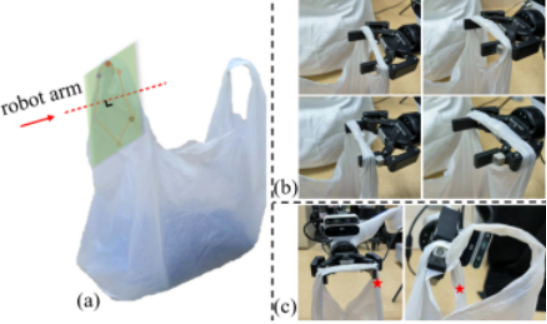
图 5:(a)插入方向的计算。(b)打结的不同初始阶段。(c)动作 1 和动作 2 前的末端执行器视图。红色星标表示目标位置
定量结果:
实验评估了调整成功率(ASR)、打结成功率(KSR)和完整任务成功率(FSR)三个指标。
对训练过的塑料袋,FSR 达 86.7%,未演示的灰色塑料袋 FSR 仍达 80%,远超基线方法(如 DI 在灰色袋上 FSR 为 0%);
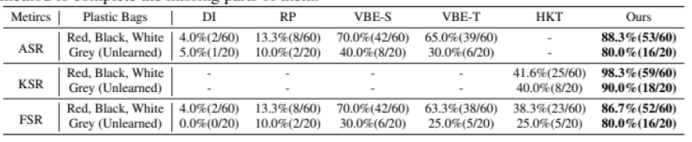
表 1:不同方法的成功率。基线方法的 FSR(成功评分率)通过使用我们的方法来完成其缺失部分进行计算。
KSR 表现突出,训练袋达 98.3%,泛化袋达 90%,证明运动基元学习的鲁棒性。
失败分析:深度估计误差导致 13.3% 的抓取失败,填充物掉落为次要原因。
关键成果与突破
实验表明,IIM框架通过 “交互塑形 - 可靠感知 - 精准执行” 三部曲,将塑料袋打结从 “不可行” 变为 “高可靠”,ASR 较基线 VBE-S 提升 26%。解决传统方法中初始构型复杂导致的感知失效问题,首次实现 85% 的端到端打结成功率。
实现了以下突破:
-
迭代交互建模:首次将迭代交互建模方法应用于塑料袋打结任务,通过不断调整塑料袋的姿势来建立可靠的关键点骨架模型。
-
多视图几何与深度学习结合:利用多视图几何重建3D关键点骨架,并结合深度学习模型进行关键点检测和任务进度评估。
-
运动基元学习:通过卷积神经网络从演示数据中学习运动基元,实现了对复杂打结任务的自适应操控。
结语
本研究突破塑料袋打结技术瓶颈,证明“交互感知” 范式对柔性物体操作的有效性。未来可引入无监督学习减少演示依赖,拓展至更复杂初始构型,推动柔性机器人在家庭、仓储场景的应用。
论文详情:https://openreview.net/pdf?id=KDuBFXyRuE-
我们能做什么
定制化机器人系统开发
-
基于Kinova机器人机器人的复合机器人、双臂协作系统、机器视觉集成方案等。
核心技术研发支持
-
三维机器视觉算法、机器人控制算法、灵巧手系统开发。
一站式机器人产品供应
-
代理 Franka、Kinova、Force Dimension、Robotiq、Onrobot、LEAPHand、因时机器人、松灵机器人、海康机器人等国内外知名品牌。
快速部署与调试服务
-
48 小时内工程师现场调试,专属技术管家全程支持。
我们能为客户提供什么
高性能产品与解决方案
-
原厂认证的机器人及高可靠性配件,覆盖工业、医疗、科研多领域。
灵活的服务模式
-
支持设备购买、租赁、分期付款等多元合作方案。
极速响应与专业支持
-
15 分钟内技术响应,定制化需求快速落地。
全生命周期服务
-
从方案设计、系统集成到售后维护,提供全流程技术保障。
公司介绍
显扬科技旗下BFT机器人平台是Kinova机器人机器人官方代理商,专注于为客户提供高精度协作机器人及行业解决方案。
核心优势
-
资深工程师团队,具备多领域机器人系统开发经验;
-
国内外顶尖机器人品牌资源整合能力;
-
自主研发的机器视觉与灵巧手技术;
-
全天候高效服务支持体系。

















 776
776

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









