



前言:
在葡萄酒产业迈向智能化与数字化转型的浪潮中,生产效率与产品质量的双重提升成为企业核心诉求。传统灌装产线因人工操作精度不足、柔性化程度低等问题面临挑战,而协作机器人技术的突破为行业提供了新解法。
优傲 UR20 协作机器人以其高性能,为葡萄酒灌装产线带来柔性生产新方案,重塑行业生产模式。

葡萄酒灌装产线现状难点
-
产品切换难:葡萄酒品类多、瓶型/包装规格差异大,传统产线切换耗时低效。
-
操作要求高:易碎品需高精度轻柔操作,人工破损率高,传统机械臂灵活性不足。
-
生产模式不适应:个性化需求增长,小批量多批次生产常态化,传统固定产线响应缓慢。
优傲UR20技术核心
四大性能优势:

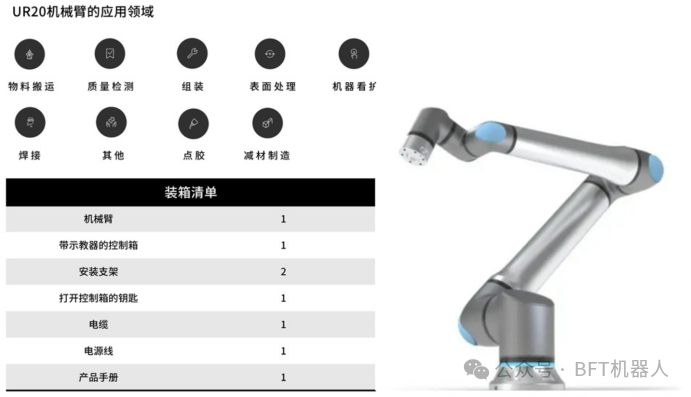
可应用领域与产品清单:
实解决方案(以Raumland GmbH公司 Robotiq PE20 码垛方案为例)
德国Raumland GmbH作为高端起泡酒生产商,面临季节性订单激增与产线柔性不足的矛盾。通过引入UR20与Robotiq PE20码垛解决方案
将UR20部署于产线末端,搭载定制化真空夹具,可同步抓取双箱并精准定位堆叠,托盘满载后自动切换至备用托盘,实现无人化连续作业。其安全协作模式符合人机交互标准,无需物理隔离即可与员工协同,保障生产流畅性的同时提升产线柔性。

UR20方案技术亮点:
毫秒级力控反馈
内置六维力传感器实现0.1N力控精度,软木塞压入力度实时动态调整,破损率趋近于零。
AI视觉引导系统
3D相机+深度学习算法自动识别瓶型(误差≤0.3mm),兼容勃艮第瓶、香槟瓶等异形包装。
无围栏协作模式
安全皮肤传感器与速度监控技术结合,实现人机30cm内共存,响应碰撞≤0.1秒。
即插即用数字接口
预置URCaps插件库,2小时内完成与X射线检测、MES系统的数据互通,支持数字孪生部署。
方案优势
-
效率提升:生产效率提高 30%+,快速响应订单交付;
-
成本控制:减少人工,降低人力成本;高精度操作降低破损率,节约生产成本;
-
灵活适配:无需大规模改造,快速切换多品种生产,增强市场应变能力;
-
投资回报快:模块化设计支持未来扩展,如加装视觉系统实现自动分拣,进一步延长设备生命周期价值;

















 1890
1890

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









