




教授机器人工具灵活操作难题
在教授机器人灵活使用工具方面,目前主要有两种策略:一是人类遥控(用于模仿学习),二是模拟到现实的强化学习。然而,这两种方法均存在明显的局限性。
1、人类遥控(用于模仿学习):在实际操作中困难重重。人类在没有触摸反馈的情况下,很难在不同实施例中做出安全且灵巧的动作。
2、模拟到现实的强化学习:领域差距使模拟策略难用于现实;复杂任务需特定参数和模型架构,耗时费力且可扩展性差。
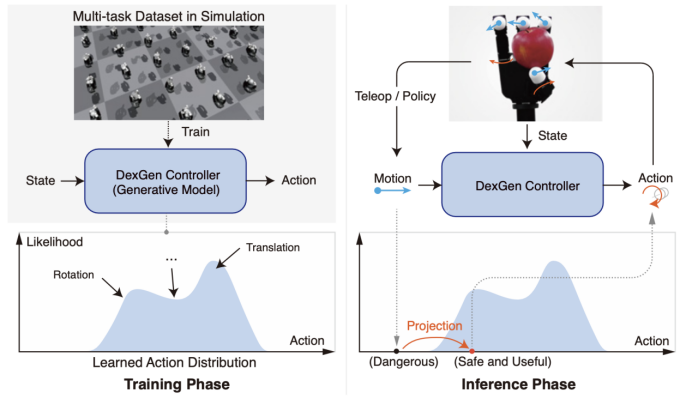
加州大学伯克利分校 BAIR 研究院与 Meta AI 携手开发出 DexGen,旨在解决教授机器人灵活使用工具的难题。DexGen 借助生成式模型优化机器人运动,可使机器人将人类给出的粗略操作指令,在仿真环境中通过强化学习自主调整,转换为精准且安全的动作。
DexGen技术解析:
建立一套成熟的操作认知:
让 DexGen 在模拟里学习多样灵巧操作行为,借助远程操作等高级策略把粗略动作细化成精细灵巧动作。
扩大数据集
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1172
1172

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









