 Ubuntu上安装librealsense2库的详细步骤
Ubuntu上安装librealsense2库的详细步骤





Register the server’s public key:
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE
In case the public key still cannot be retrieved, check and specify proxy settings: export http_proxy="http://<proxy>:<port>"
, and rerun the command. See additional methods in the following link.
Add the server to the list of repositories:sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo $(lsb_release -cs) main" -u
Install the libraries (see section below if upgrading packages):
sudo apt-get install librealsense2-dkms
sudo apt-get install librealsense2-utils
The above two lines will deploy librealsense2 udev rules, build and activate kernel modules, runtime library and executable demos and tools.
Optionally install the developer and debug packages:
sudo apt-get install librealsense2-dev
sudo apt-get install librealsense2-dbg
With dev package installed, you can compile an application with librealsense using g++ -std=c++11 filename.cpp -lrealsense2 or an IDE of your choice.
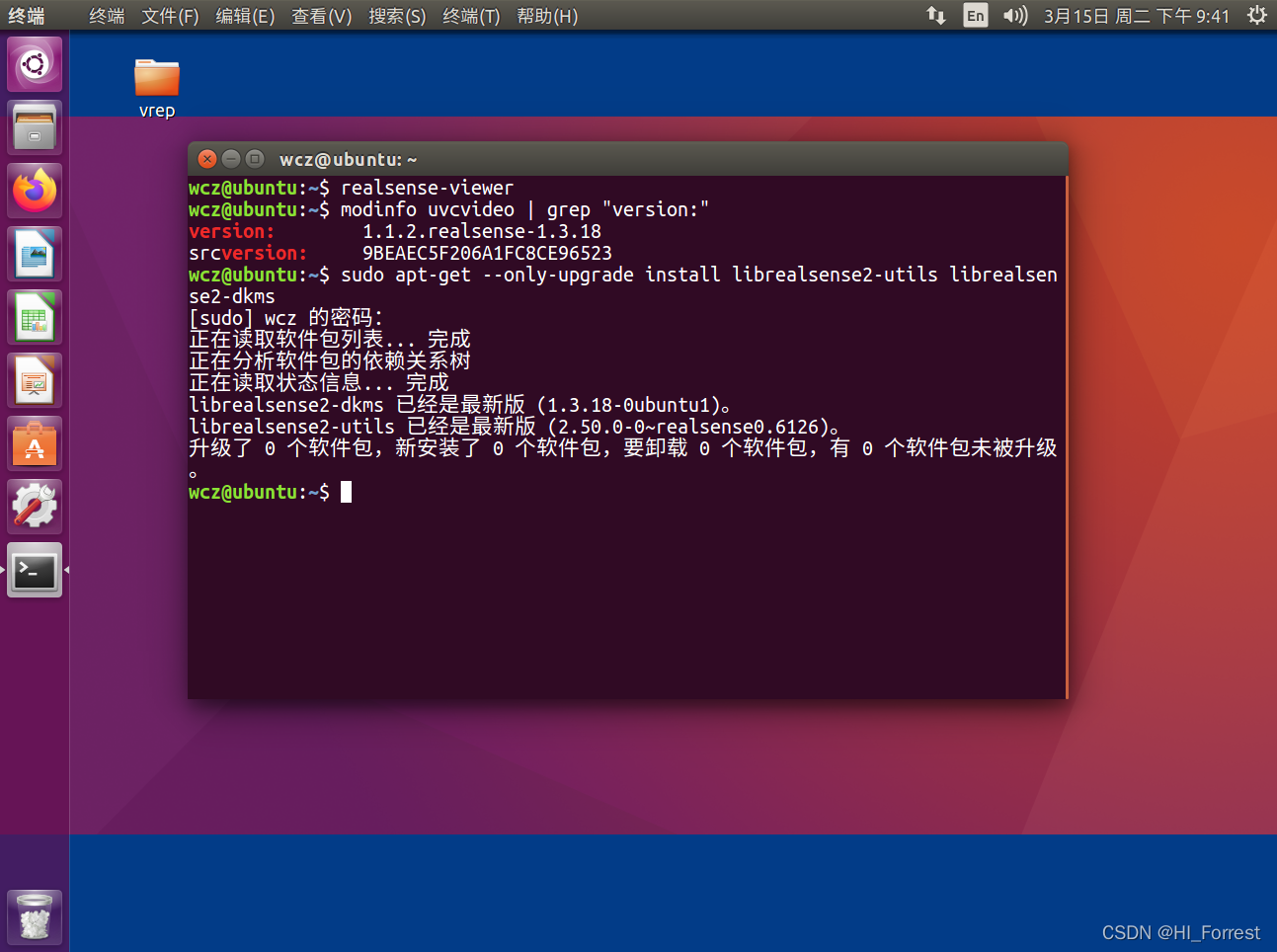
Reconnect the Intel RealSense depth camera and run:
realsense-viewer to verify the installation.
Verify that the kernel is updated :
modinfo uvcvideo | grep "version:" should include realsense string


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









