






踩过一些坑,有问题相互交流(qq:1347434049)
0.前提
已经装好ROS和PCL。
1.创建一个catkin工作空间
mkdir -p catkin_ws/src
cd catkin_ws/src
catkin_init_workspace如果已经创建,跳过即可。
2.下载LOAM源码
cd ~/catkin_ws/src
git clone https://github.com/laboshinl/loam_velodyne.git3.编译LOAM
在 loam_velodyne/CMakeLists.txt 和 loam_velodyne/src/lib/CMakeLists.txt 中,加上下面命令,否则编译时会提示找不到"vtkproj4":
list(REMOVE_ITEM PCL_LIBRARIES "vtkproj4")进入catkin_ws目录下进行catkin_make:
cd ~/catkin_ws
catkin_make打开.bashrc:
gedit ~/.bashrc在最后加上下面命令,保存,关闭:
source ~/catkin_ws/devel/setup.bash4.运行LOAM
新开一个终端,运行:
roslaunch loam_velodyne loam_velodyne.launch5.播放bag
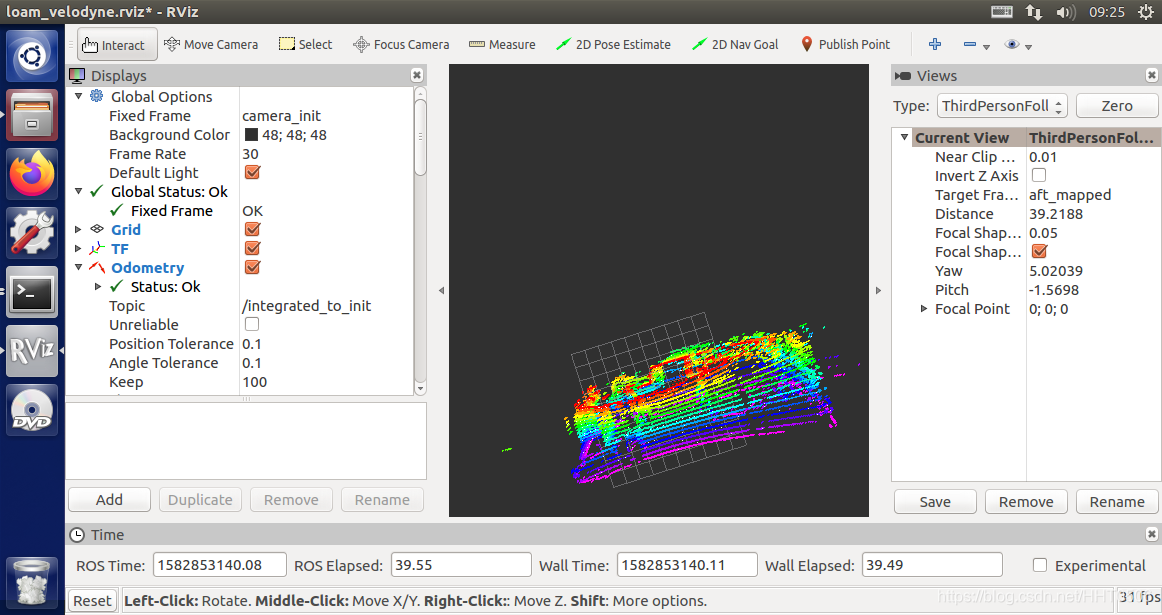
将nsh_indoor_outdoor.bag(提取码:kdb8)放到HOME主目录下,终端运行:
rosbag play ~/nsh_indoor_outdoor.bag可以在RVIZ中看到点云。


















 2390
2390




 到【灌水乐园】发言
到【灌水乐园】发言









