




三维城市模型在GIS领域正朝着技术融合、基础设施化和应用深化的方向发展,成为国家战略性基础设施的重要组成部分,并在城市规划、环境保护等领域发挥越来越重要的作用。但如何快速生成建筑模型成为大家的首要问题,不可能一个个对建筑进行建模,这太麻烦了,城市那么大,城市地段不断开发,建筑不断在增加,能不能批量生成建筑呢?
面对这一问题,在GISBox团队地努力下,在GISBox的场景编辑中实现了框选地图,秒变建筑模型的功能,将矢量数据转为3D建筑模型,逼真的建筑模型在GIS领域提供很大的帮助。本文带大家了一起展示一下建筑自动生成这一功能!

一、地图框选
1、打开GISBox软件,新建场景,点击“从地图获取”。
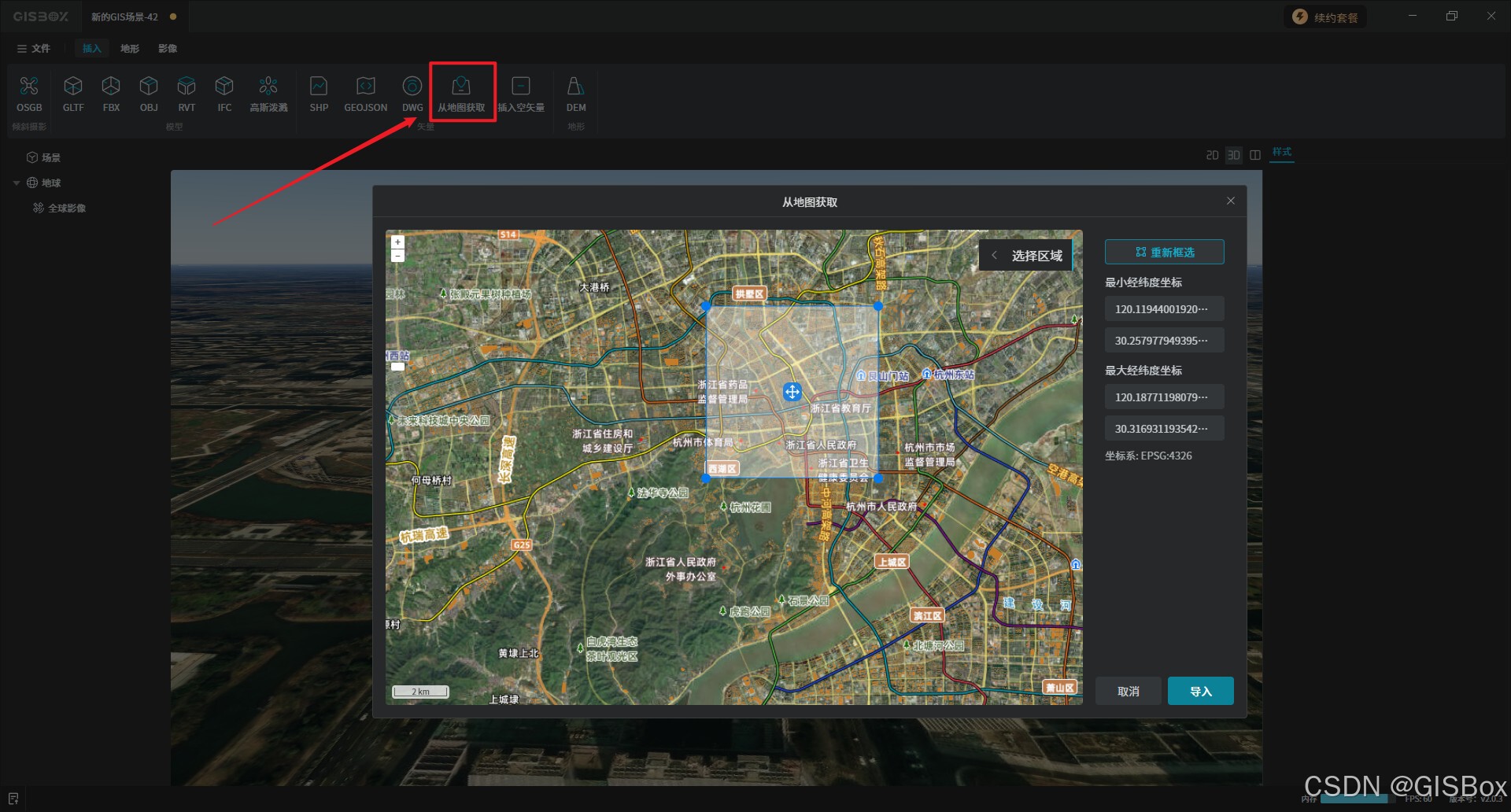
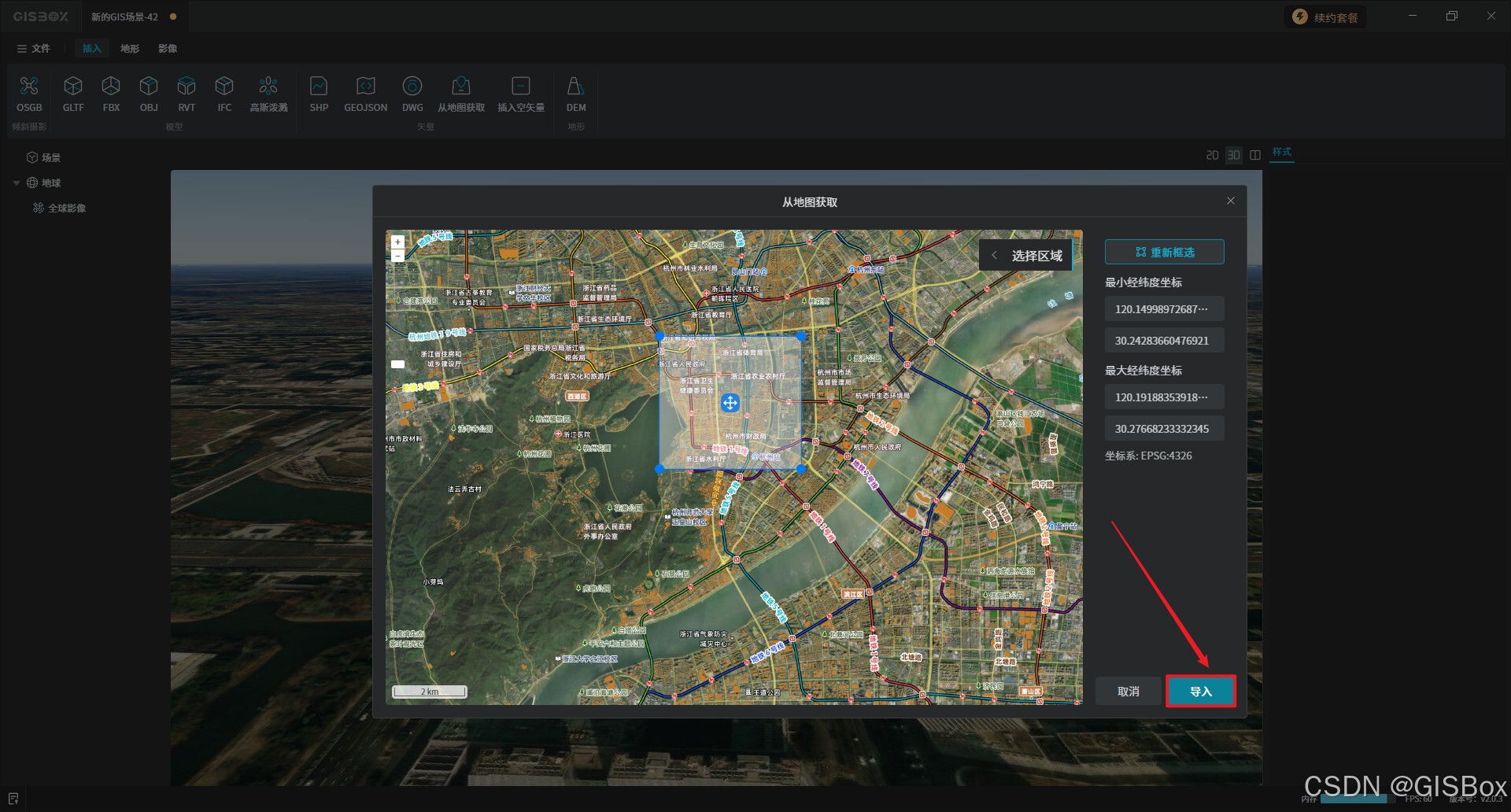
2、移动选框,从地图上框选需要生成的城市建筑模型,框选完成后,点击导入。
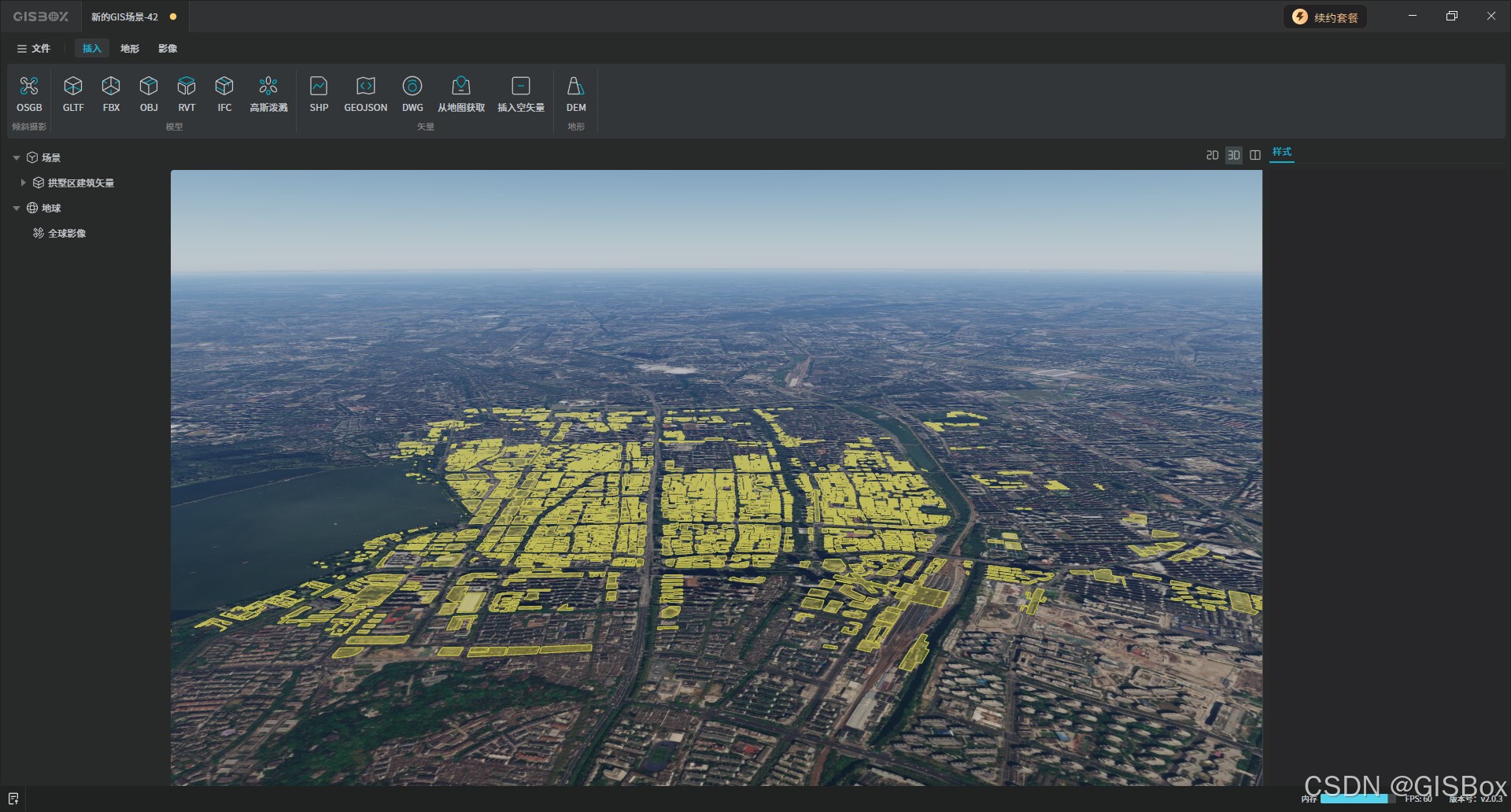
3、导入场景后,3D场景中的黄色区域,便是我们框选的城市建筑。
二、生成建筑,修改建筑风格
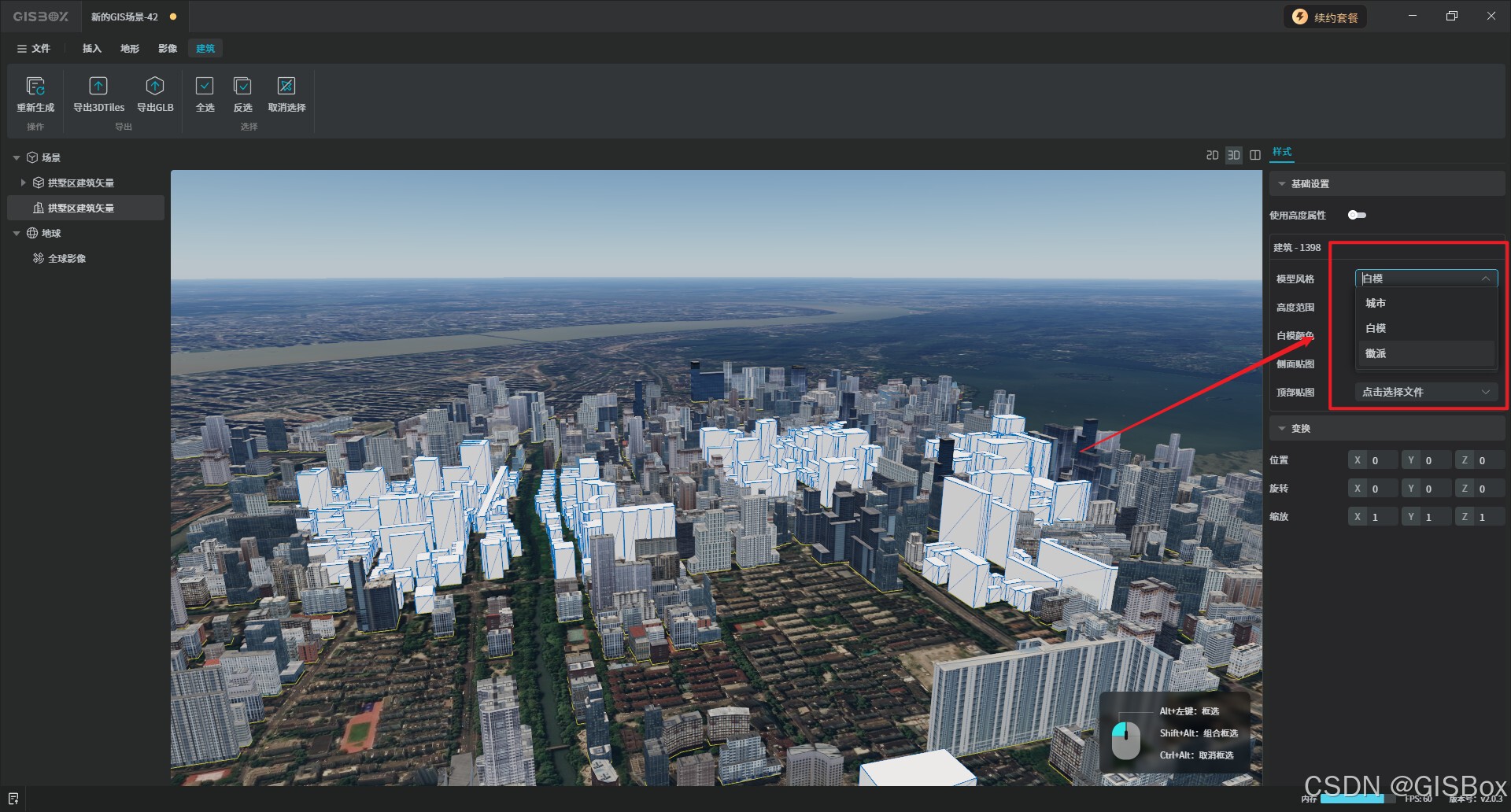
1、选中右侧场景中区域名称,点击左上角的“生成建筑”操作,在模型风格中选择“城市”。
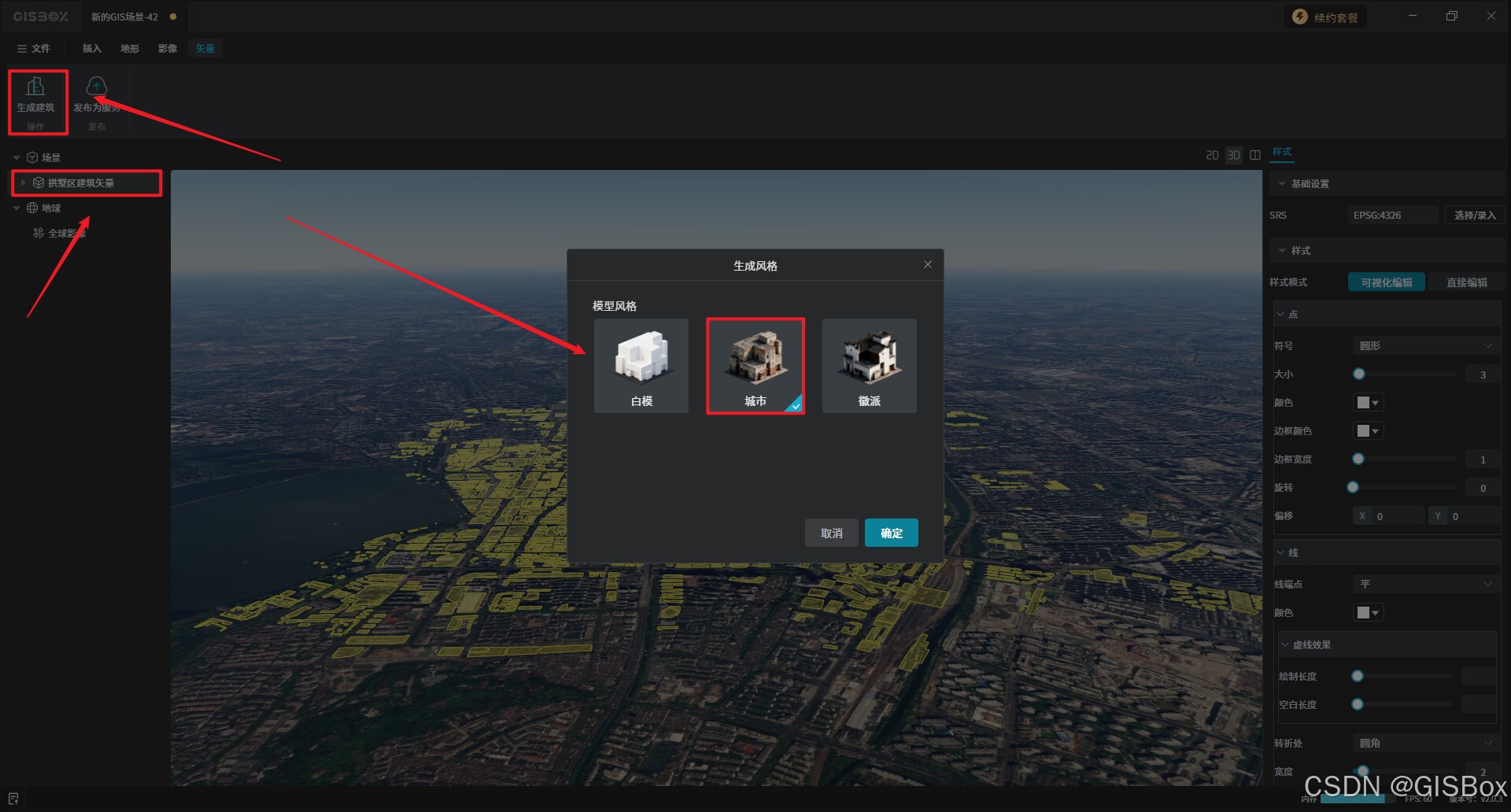
2、此时场景中自动生成建筑模型,点击任意建筑可修改其建筑风格,也可点击“全选”,进行风格统一。
三、服务发布
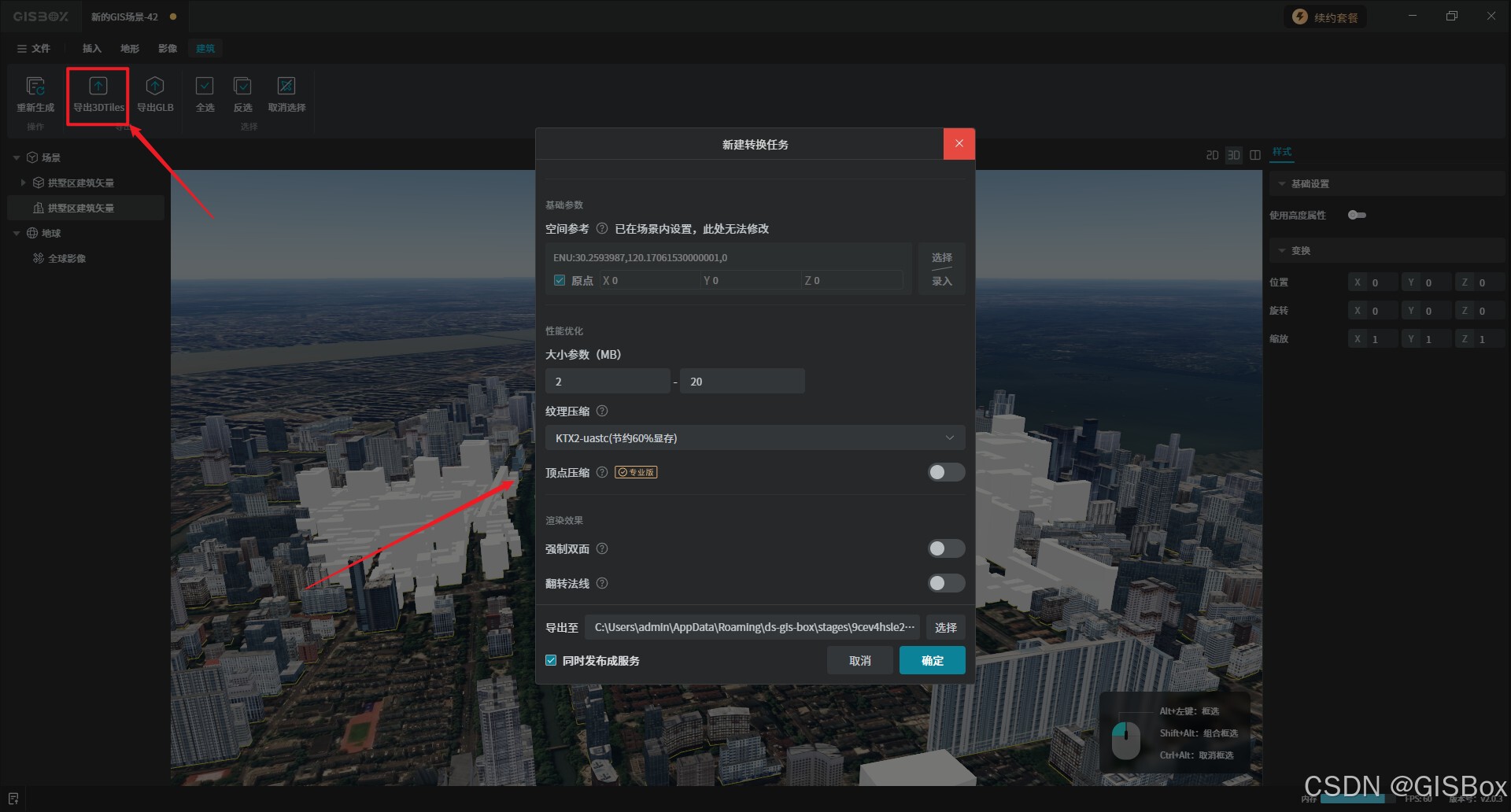
1、编辑好的建筑,可以将其发布为3DTiles格式。在右上角点击“导出为3DTiles”,并在新建转换任务中直接点击确定。
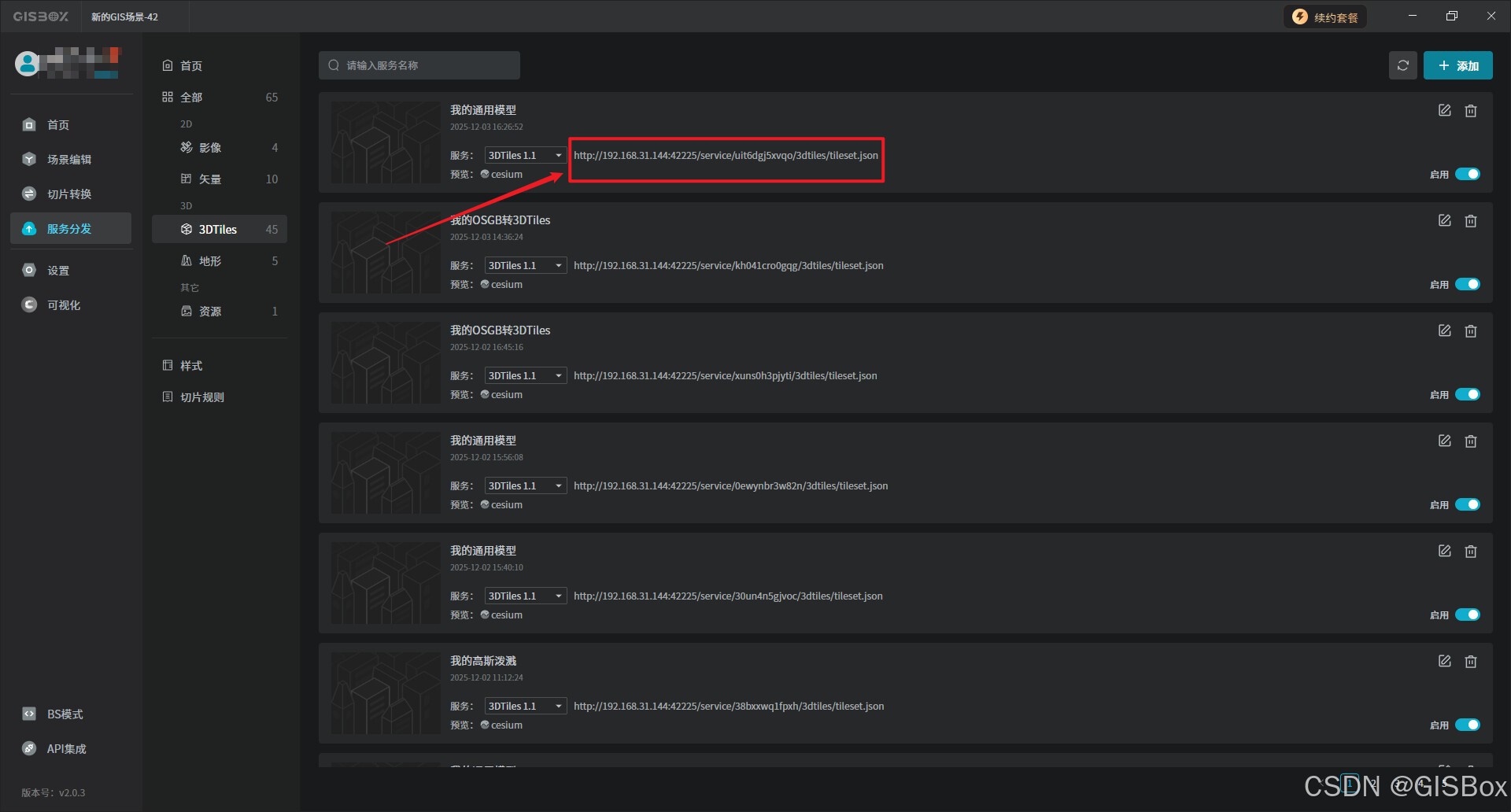
2、导出完成后,服务分发中就会自动添加一条服务,点击“cesium”按钮,浏览器直接预览效果。
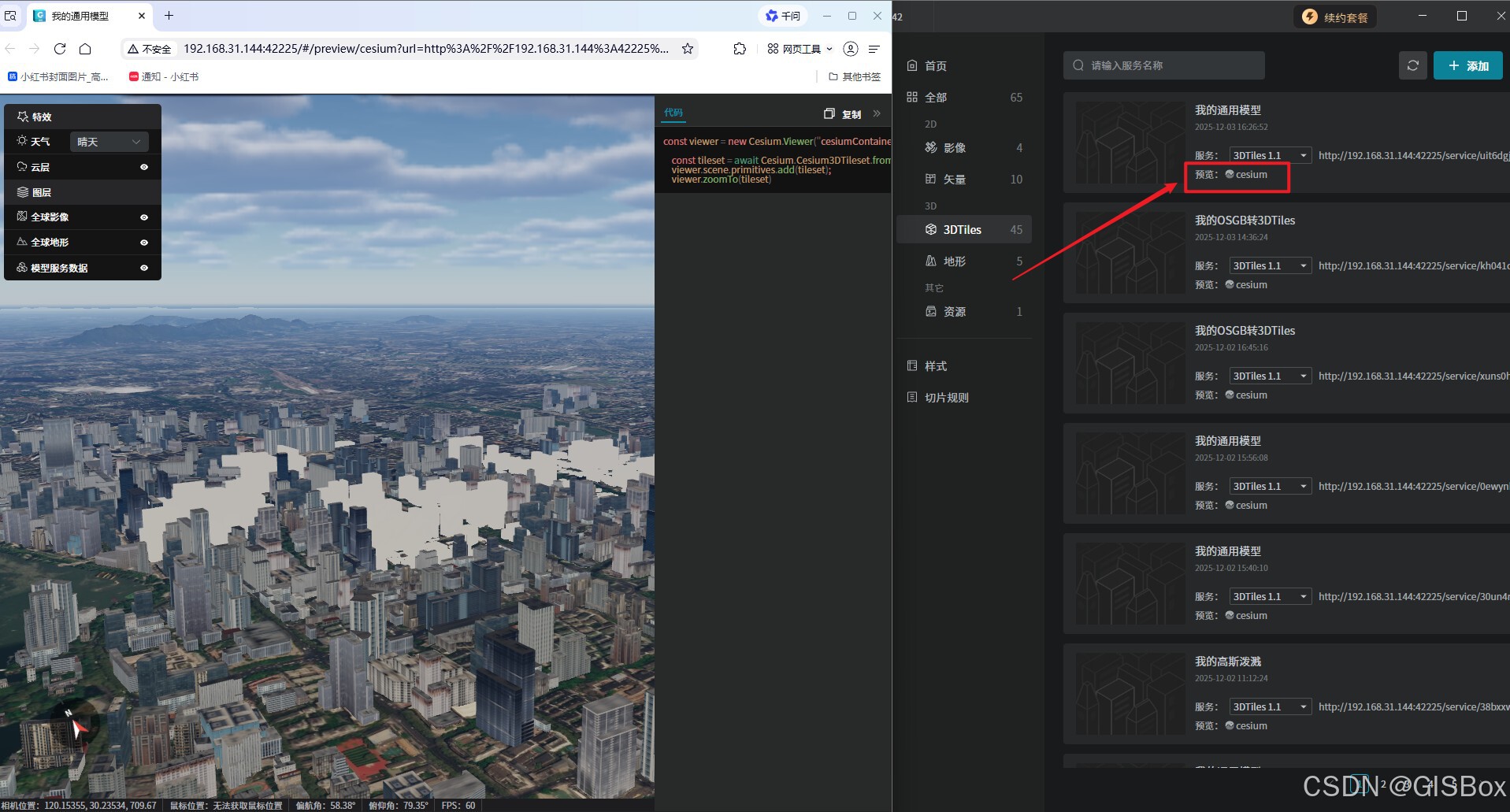
3、生成的服务地址可以直接应用到GIS引擎或数字孪生项目中,如山海鲸可视化。
四、总结
GISBox的建筑自动生成功能通过地图框选、风格切换和服务发布三个核心步骤,高效解决了批量生成三维建筑模型的难题。该功能不仅操作简便,还支持建筑风格的个性化修改与统一,生成的模型可快速导出为3DTiles格式并发布服务,直接应用于GIS引擎或数字孪生项目,为三维城市模型在GIS领域的应用深化提供了便捷且实用的技术方案。

















 442
442

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









