




高斯泼溅作为一种新兴的3D场景表示与渲染技术,在渲染效率、重建质量、灵活性等方面实现了突破性平衡。为了响应GIS用户对高斯泼溅的编辑,GISBox团队加班加点对高斯泼溅切片进行升级并支持KHR_gaussian_splatting_compression_spz_2扩展,让高斯模型可轻松在场景中进行编辑以及发布。本文就带大家了解如何用GISBox对高斯模型进行编辑操作的。
一、高斯泼溅的定义
高斯泼溅(Gaussian Splatting)是一种基于3D高斯分布的光栅化渲染技术,通过各向异性高斯斑点拟合物体表面,实现实时辐射场渲染。其核心优势在于利用显式数据结构(如协方差矩阵)和GPU加速,支持超过100fps的实时渲染速度,训练效率较传统神经辐射场(NeRF)提升显著。
二、高斯泼溅的应用场景
高斯泼溅技术凭借其高效渲染与高精度建模能力,已广泛应用于文化遗产保护中实现文物毫米级数字复刻与虚拟修复,助力城市规划快速构建智慧城市三维模型并动态监测环境变化;在灾害救援中通过灾后影像快速生成受灾区域三维地图,精准评估损失并优化救援路线;同时为虚拟现实提供6DoF实时交互体验,让用户自由探索3D场景细节,还支持电力巡检精准重建变电站复杂结构,结合传感器数据实现设备状态实时监测;此外,自动驾驶领域利用其重建真实道路环境训练算法,游戏行业则通过动态编辑高斯参数快速调整场景元素,显著提升开发效率与渲染质量。
三、高斯泼溅的编辑+发布
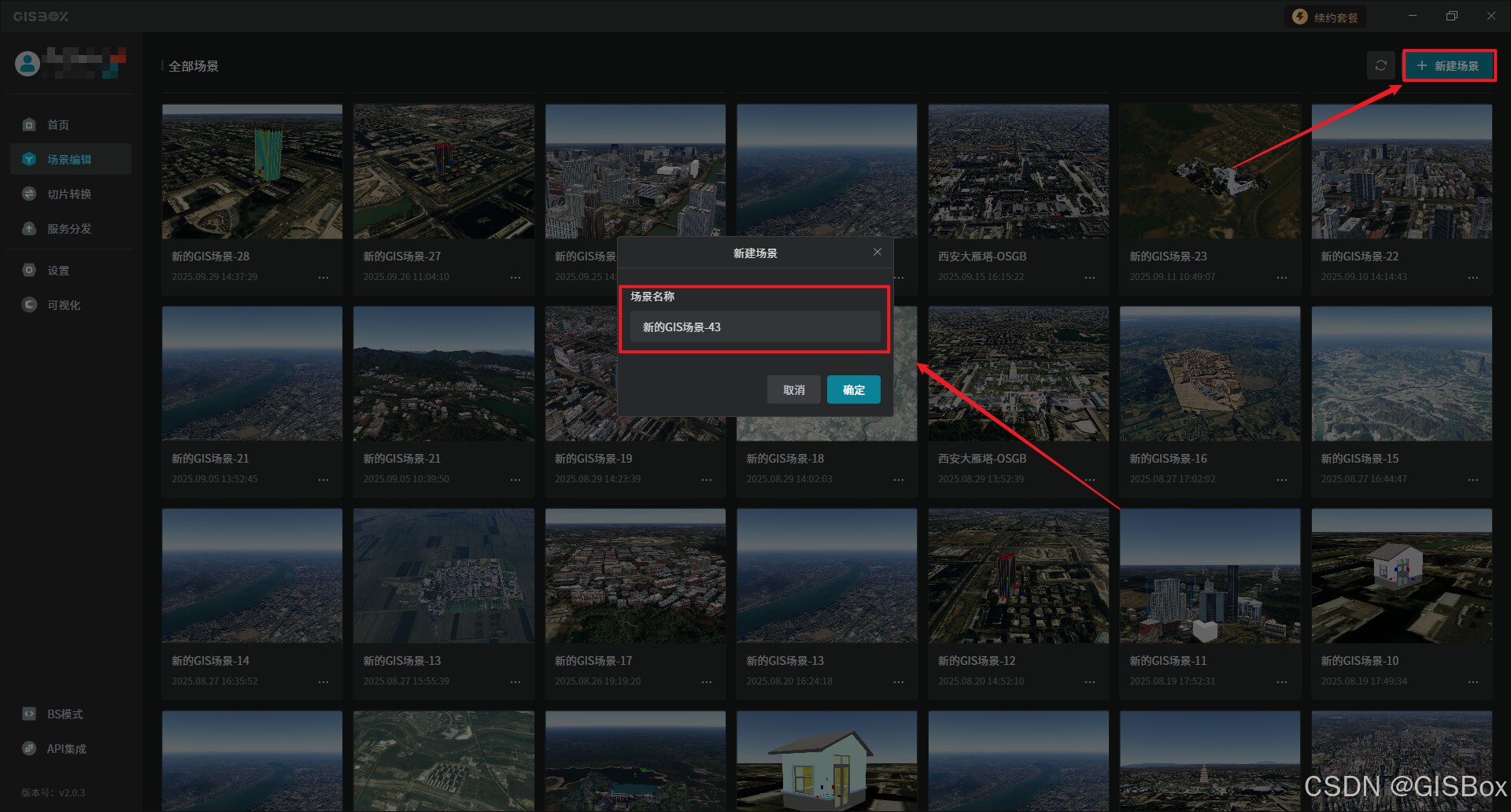
1、首先下载最新版本的GISBox软件,点击新建场景,输入场景名称。
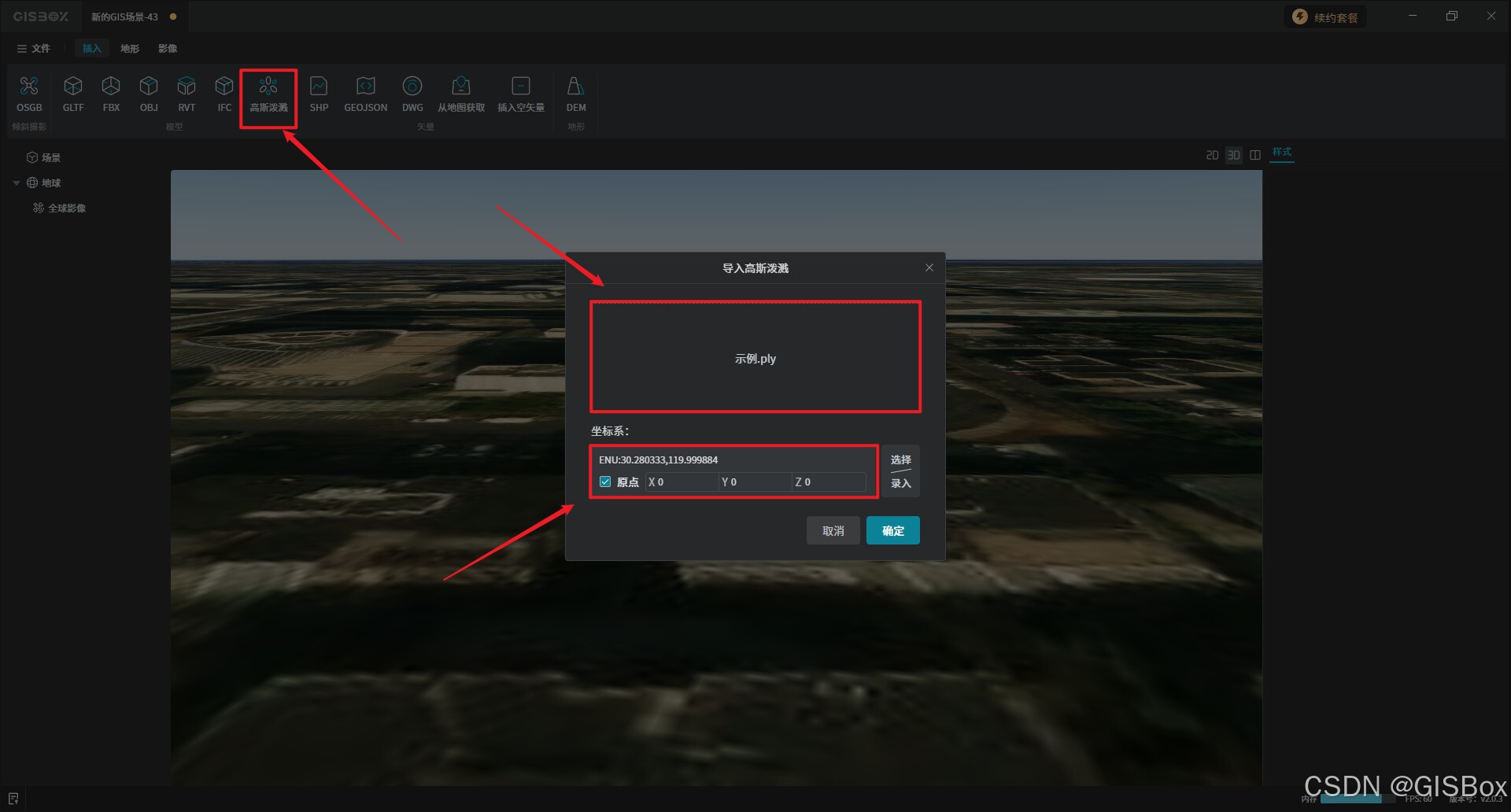
2、在场景中点击“高斯泼溅”,将高斯泼溅的格式文件导入,GISBox支持常见的.splat、.ply和.spz格式。如果模型有坐标系,可直接点击“选择”进行搜索,没有就保持默认ENU局部坐标系。
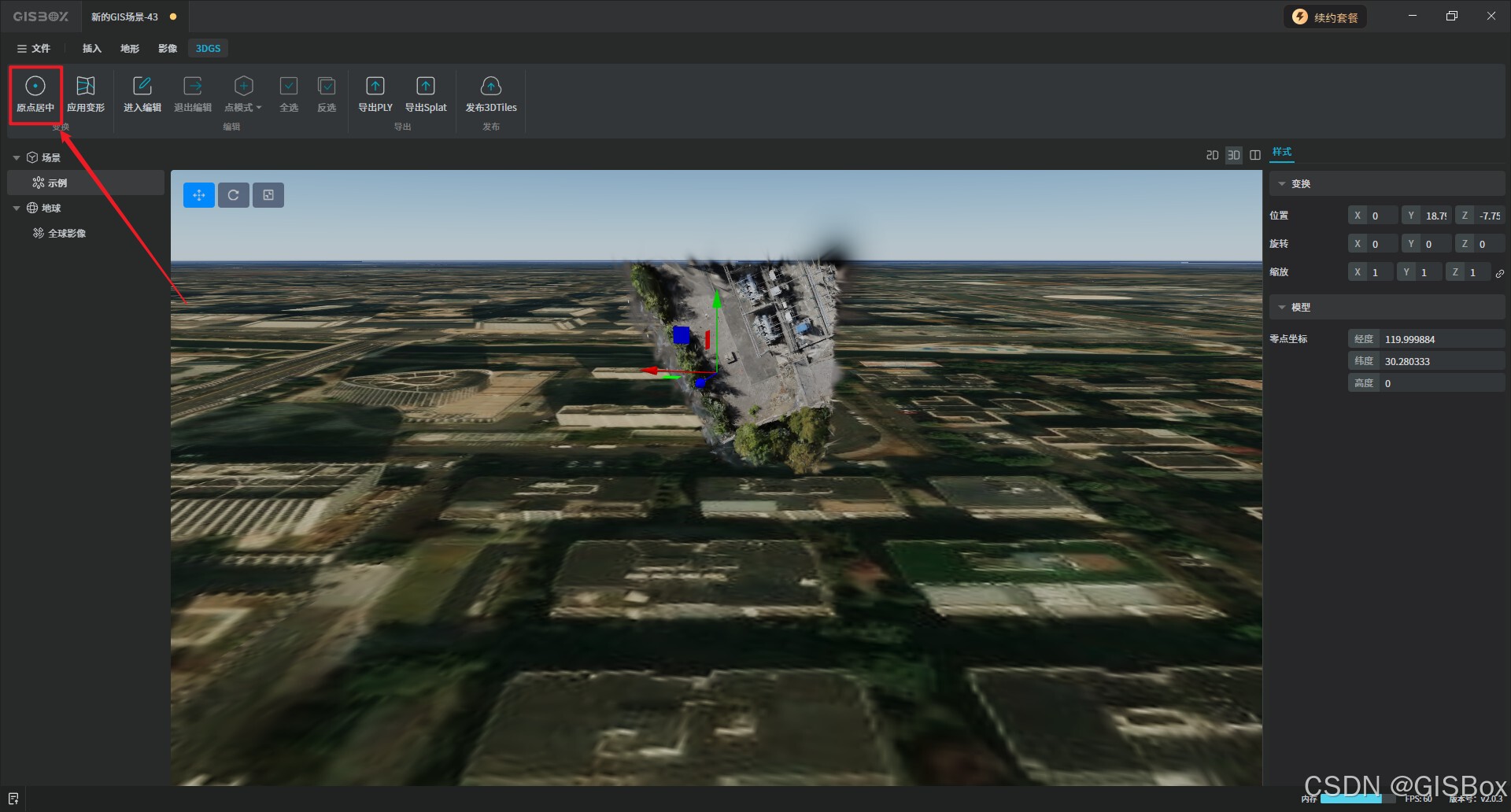
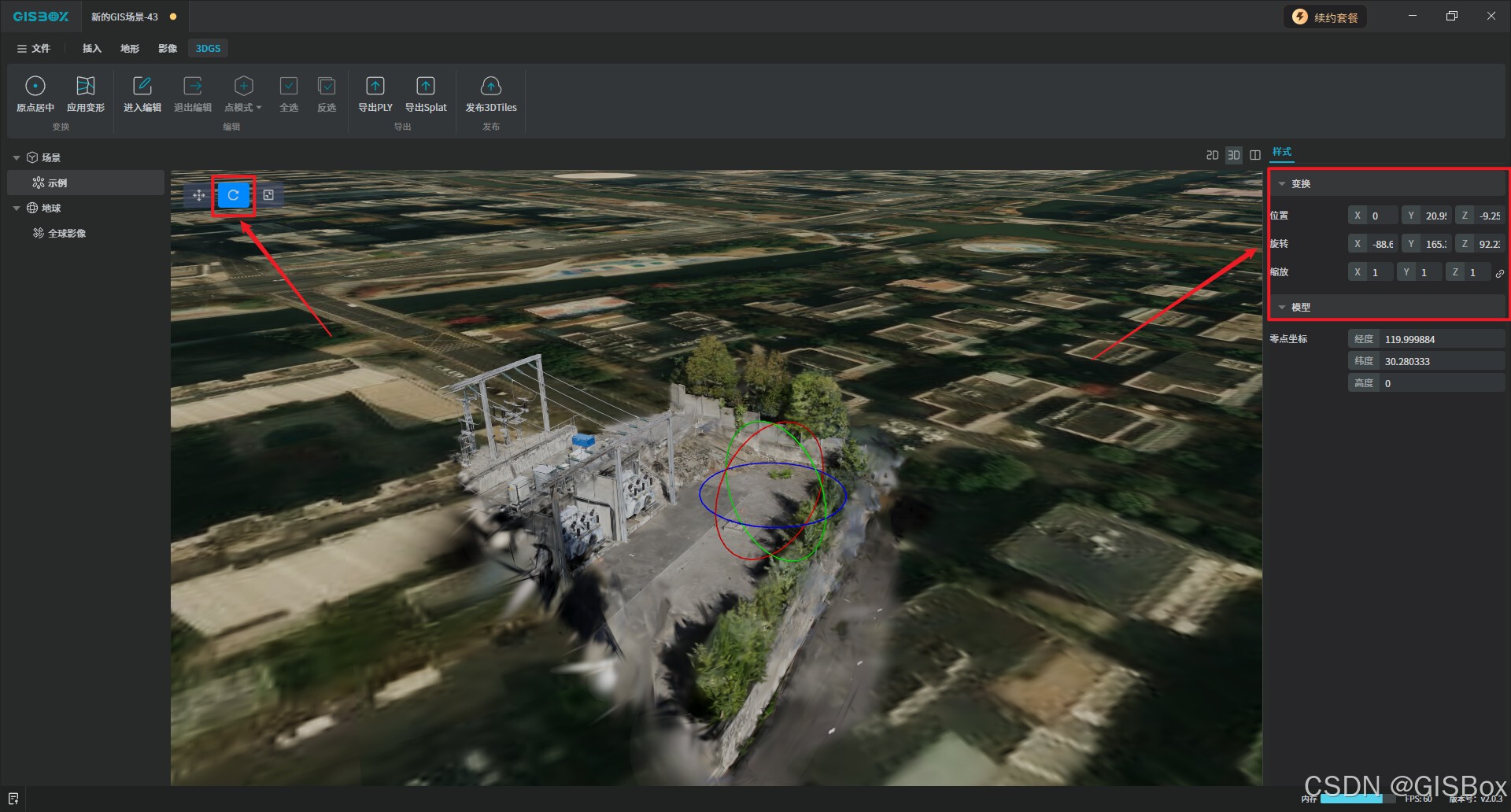
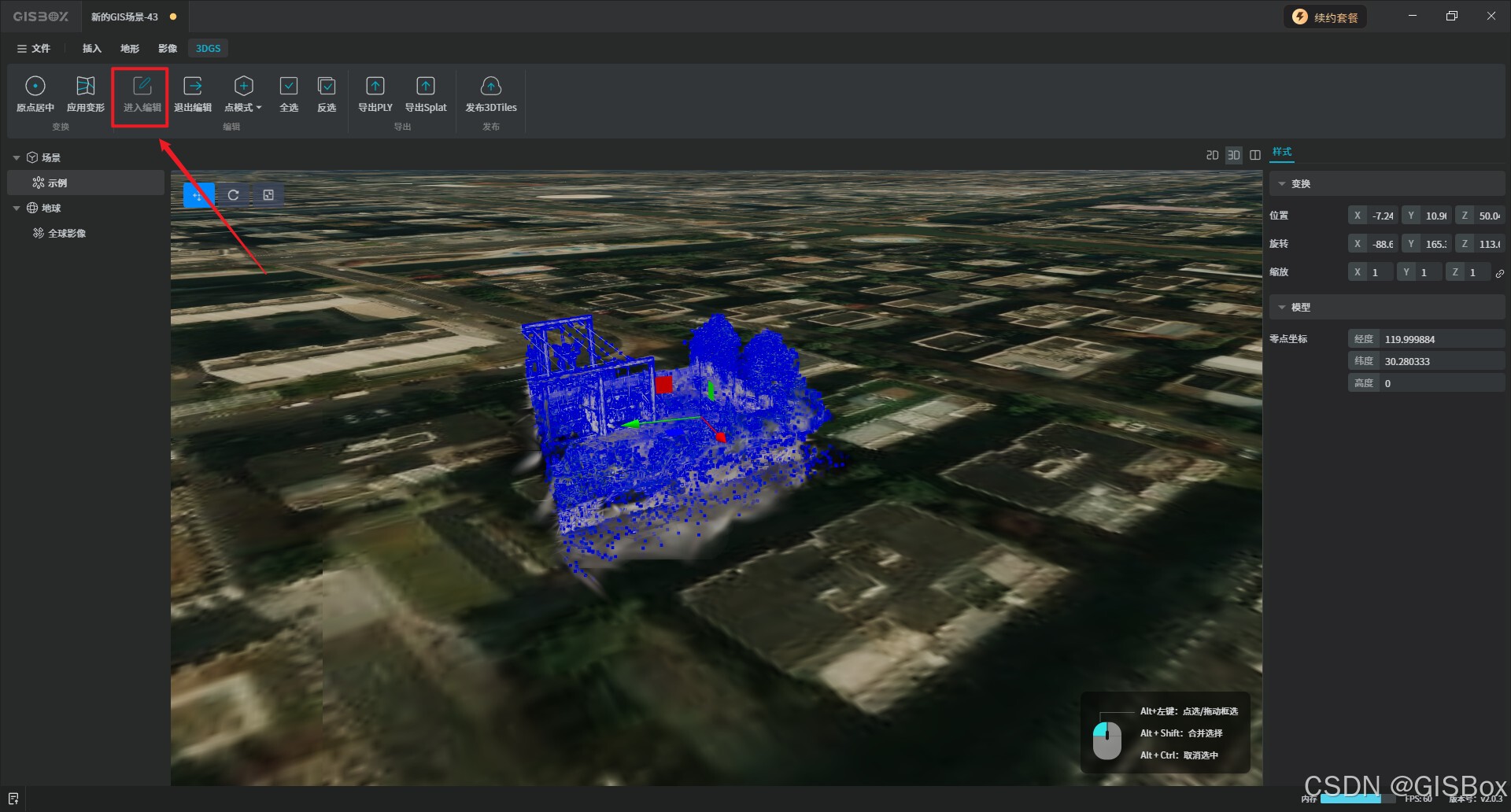
3、模型导入场景后,可能会出现模型方向翻转,或中心点偏远导致操作不便的问题。对于这一问题,用户只需点击“原点居中”按钮,将模型的旋转中心智能校准至其几何中心,并通过旋转模型来调整位置的角度。当然GISBox右侧的样式中也支持手动调整的。
4、调整完成后,点击“进入编辑”按钮,此时可以看到模型默认为点模式,用户需通过按住Alt键可以进行框选,结合Shift进行加选,即可删除不需要的模型。
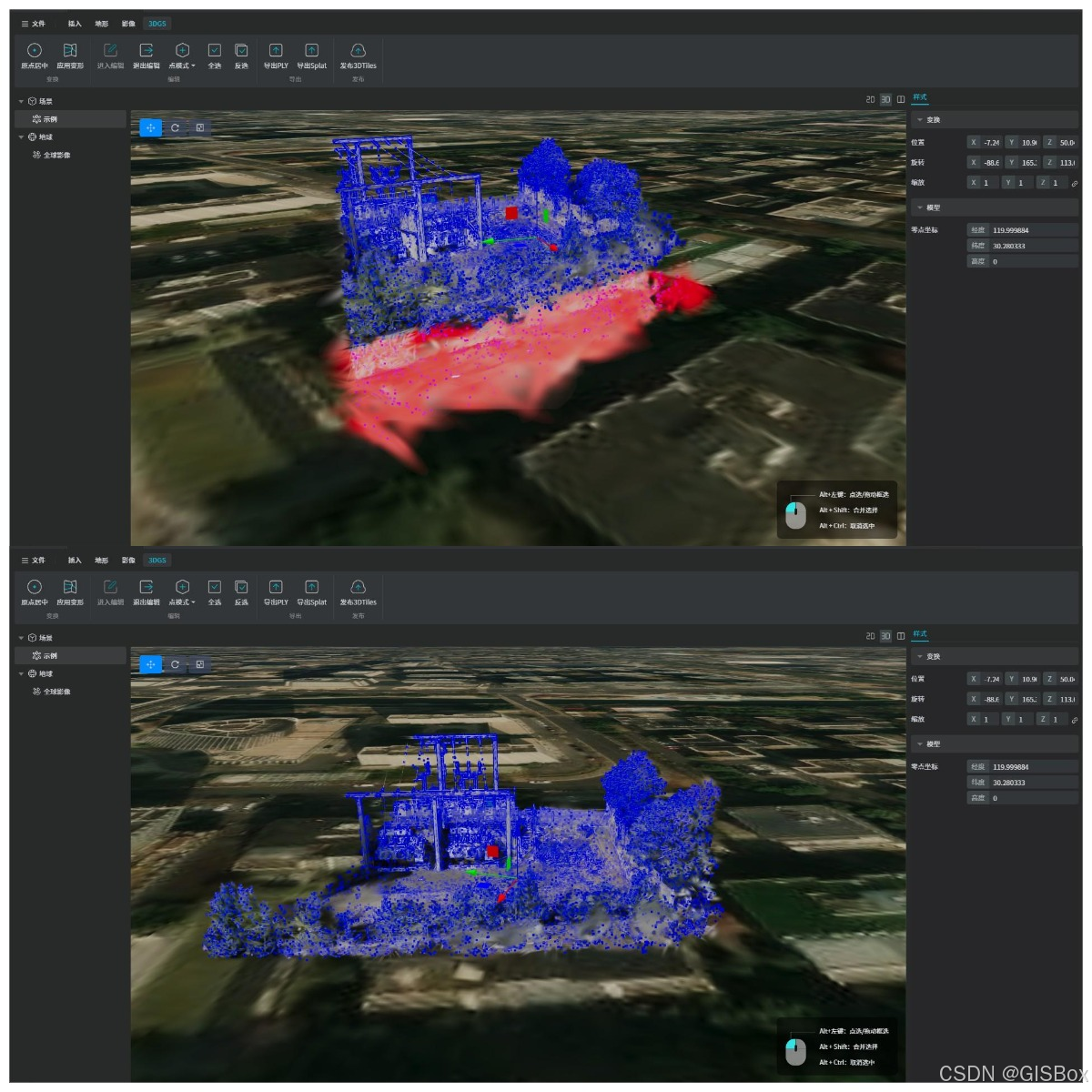
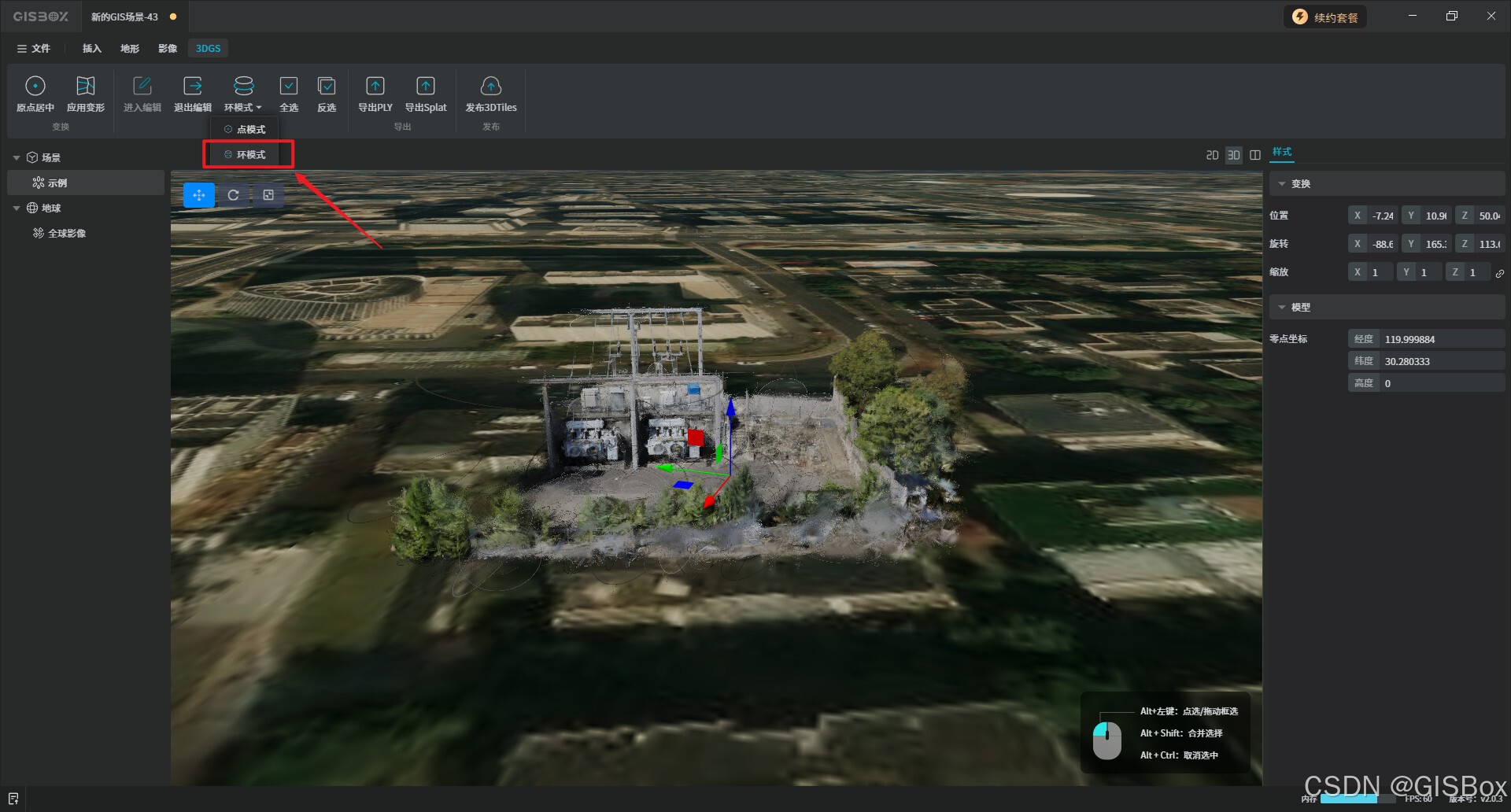
5、点击“点模式”还可以查看环模式,也可进行框选删除。
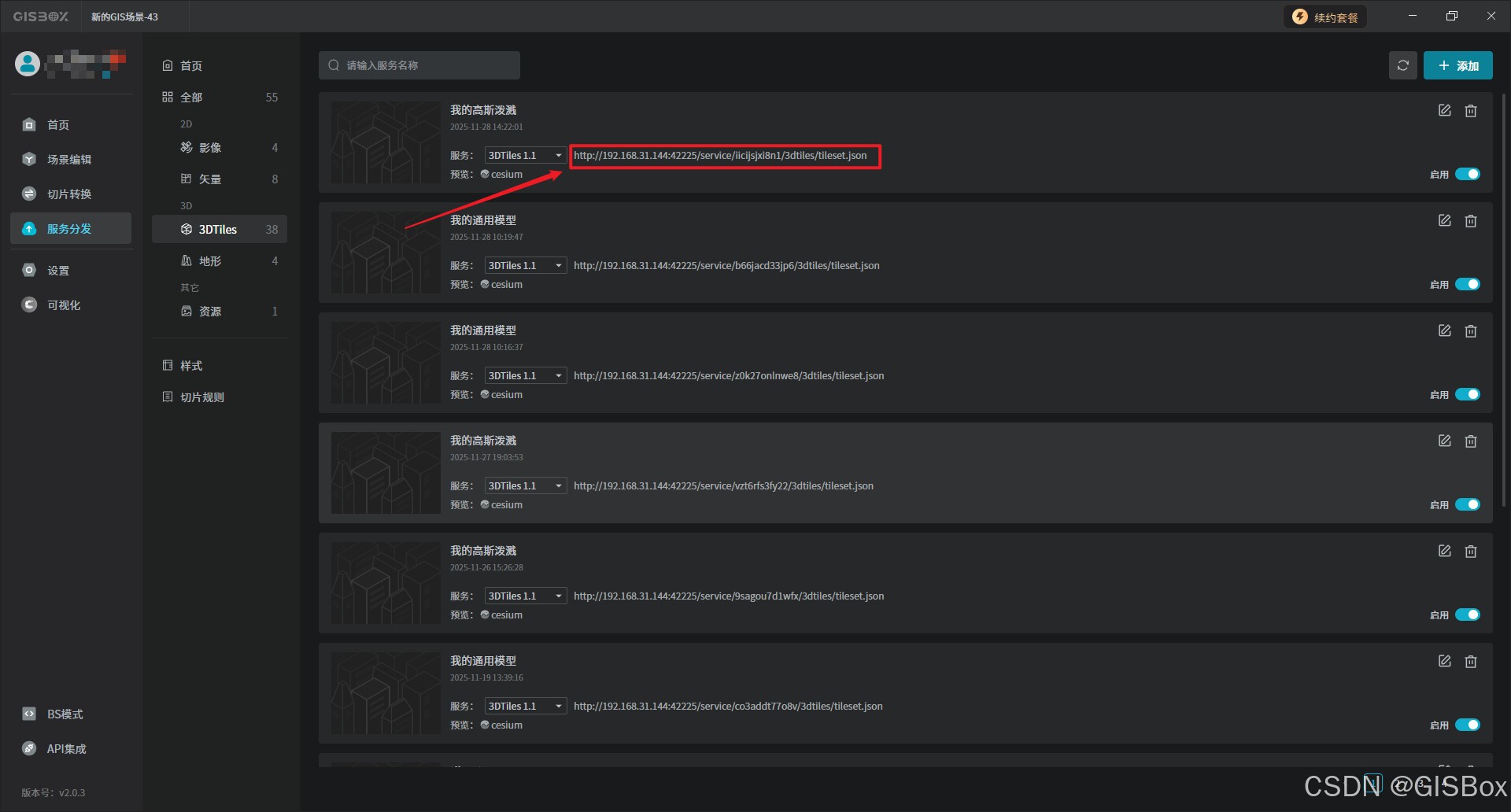
6、模型处理完成后,点击“发布3DTiles”,可一键将编辑好的高斯文件发布成3DTiles格式。
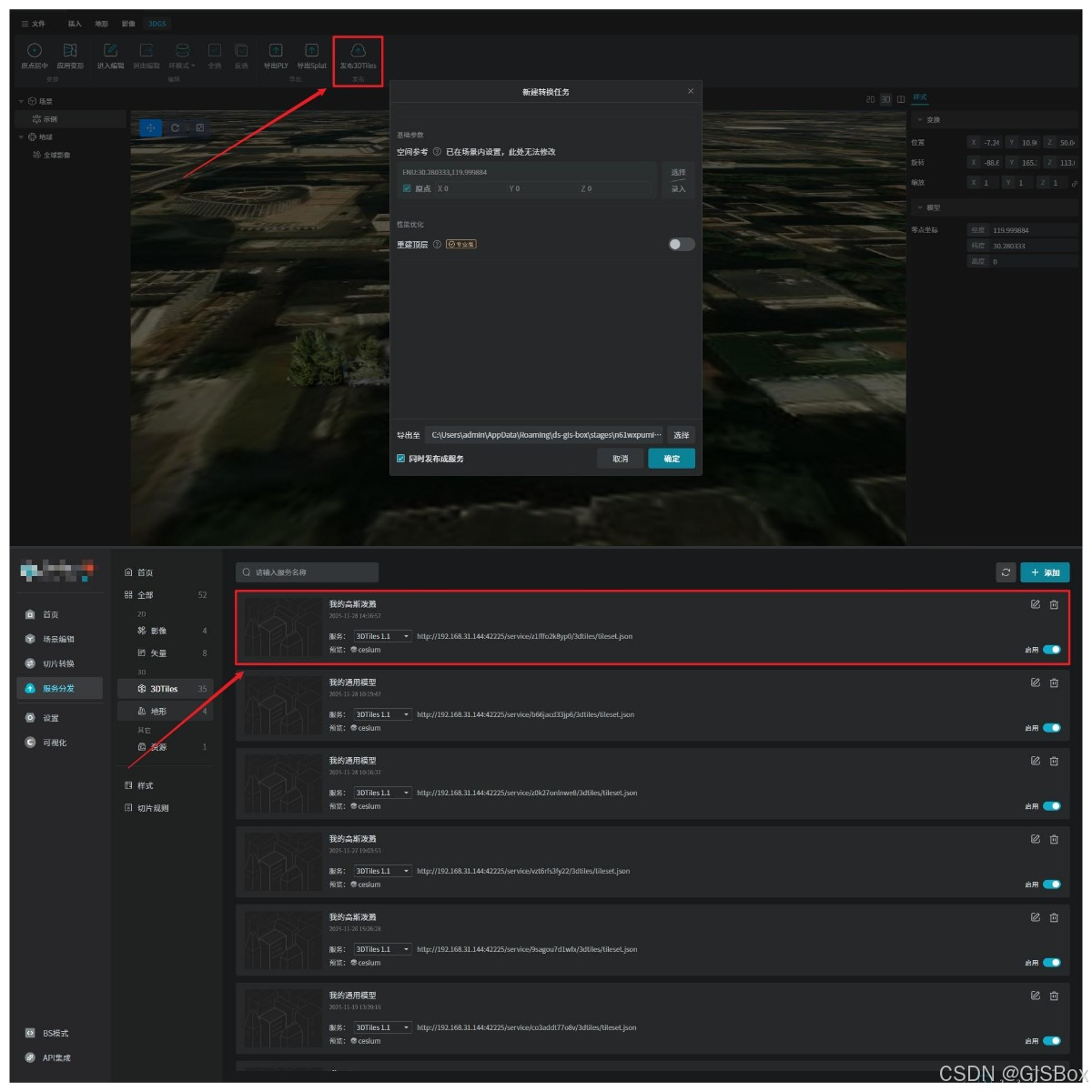
7、点击“cesium”预览框架,编辑好的高斯模型,已经完美地镶嵌在Cesium地球的正确位置上。
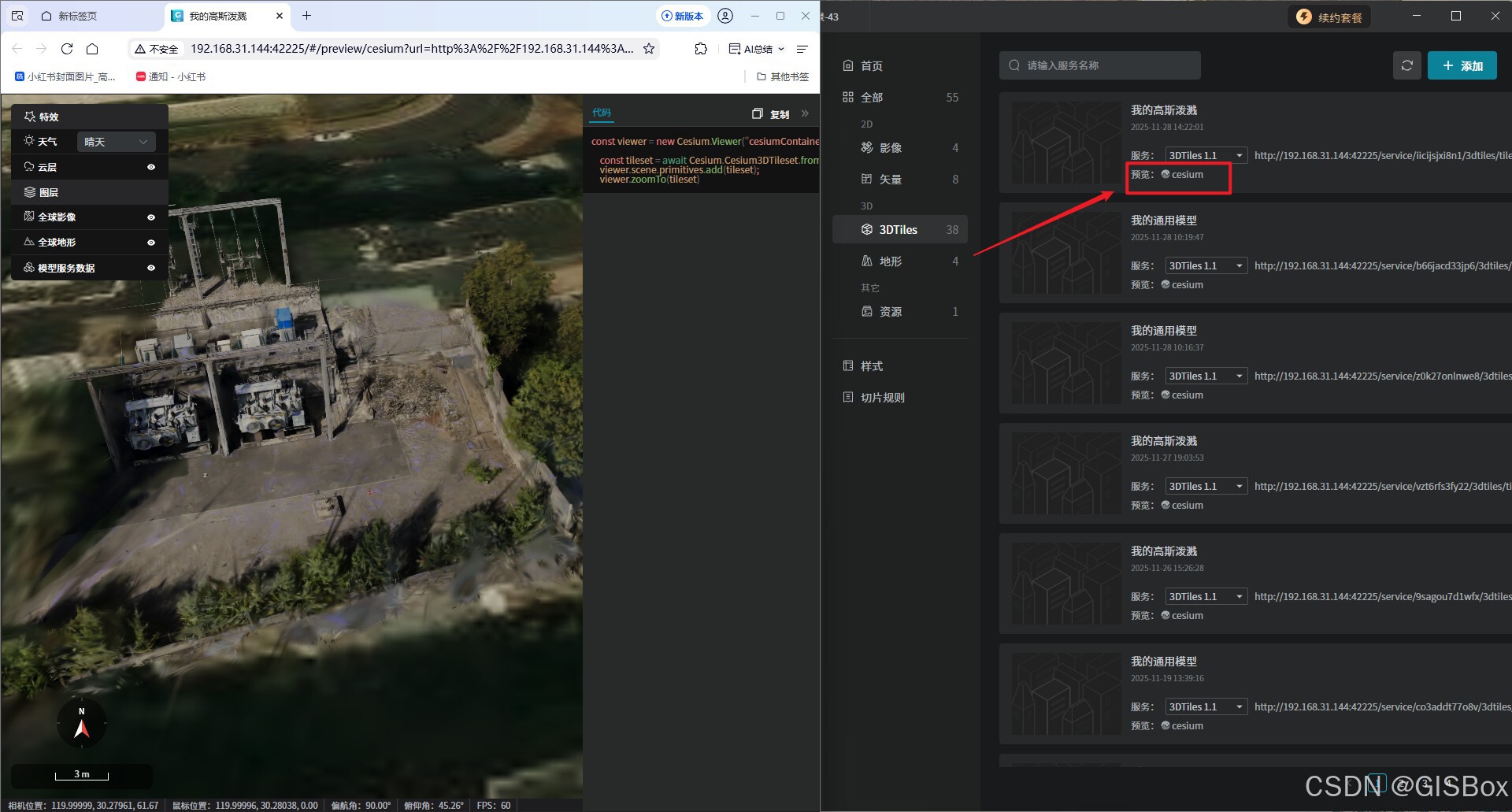
8、生成的服务地址可直接运用到cesium引擎数字孪生项目中,如山海鲸可视化。
四、总结
高斯泼溅是一种兼具高效渲染与高精度建模优势的3D技术,已在文化遗产保护、城市规划等多领域广泛应用。GISBox团队通过技术升级支持该技术的编辑与发布,用户可经下载软件、导入模型、调整位置、编辑优化、发布为3DTiles格式、预览及应用于数字孪生项目等步骤,轻松完成高斯模型的处理与应用,为相关领域的数字化建设提供了有力支撑。

















 1575
1575

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









