



💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文内容如下:🎁🎁🎁
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥第一部分——内容介绍
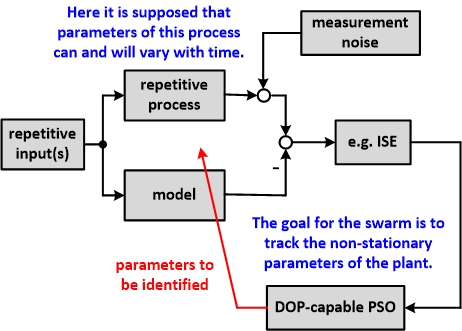
基于粒子群的非平稳重复过程参数辨识(跟踪)研究
摘要:本文聚焦于非平稳重复过程的参数辨识与跟踪问题,提出一种基于具备动态优化能力(DOP)的粒子群算法的解决方案。该算法能够实时跟踪非平稳重复过程的参数变化,当控制器增益被定义为待跟踪参数的已知函数时,可在运行过程中重新整定这些增益。通过设置标志位,可快速切换不同系统配置与粒子群更新规则。本方案受“即插式直接粒子群重复控制器”启发,适用于重复过程参数辨识、迭代学习估计、动态优化问题以及基于种群的进化优化等领域,尤其对于参数随时间变化的机器人与电力电子系统具有重要应用价值。
关键词:粒子群算法;非平稳重复过程;参数辨识;参数跟踪;动态优化
一、引言
1.1 研究背景与意义
在众多实际工程系统中,如机器人系统和电力电子系统,存在着大量重复过程。这些过程的参数往往并非固定不变,而是会随着时间、工作环境等因素的变化而发生改变。准确、实时地辨识和跟踪这些参数的变化,对于提高系统的性能、稳定性和控制精度至关重要。传统的参数辨识方法在处理非平稳重复过程时,往往面临计算复杂度高、实时性差等问题,难以满足实际工程应用的需求。因此,研究一种高效、实时的非平稳重复过程参数辨识与跟踪方法具有重要的理论和实际意义。
1.2 国内外研究现状
目前,国内外学者在重复过程参数辨识和跟踪方面已经开展了一系列研究。一些传统的方法,如最小二乘法、极大似然估计法等,在处理平稳过程时具有一定的优势,但在面对非平稳过程时,其性能会显著下降。近年来,随着智能优化算法的发展,一些基于进化算法的参数辨识方法逐渐受到关注。例如,遗传算法、差分进化算法等被应用于参数辨识问题中,取得了一定的成果。然而,这些算法在收敛速度、全局搜索能力等方面仍存在一些不足,尤其是在处理实时性要求较高的非平稳重复过程时,难以满足实际需求。
粒子群算法作为一种基于群体智能的优化算法,具有简单易实现、收敛速度快、全局搜索能力强等优点,在许多优化问题中得到了广泛应用。将粒子群算法应用于非平稳重复过程的参数辨识与跟踪中,有望克服传统方法的不足,提高参数辨识的准确性和实时性。
1.3 本文研究内容与结构安排
本文提出一种基于具备动态优化能力(DOP)的粒子群算法的非平稳重复过程参数辨识与跟踪方法。该方法能够实时跟踪非平稳重复过程的参数变化,并在控制器增益为待跟踪参数的已知函数时,实现增益的重新整定。本文的具体结构安排如下:
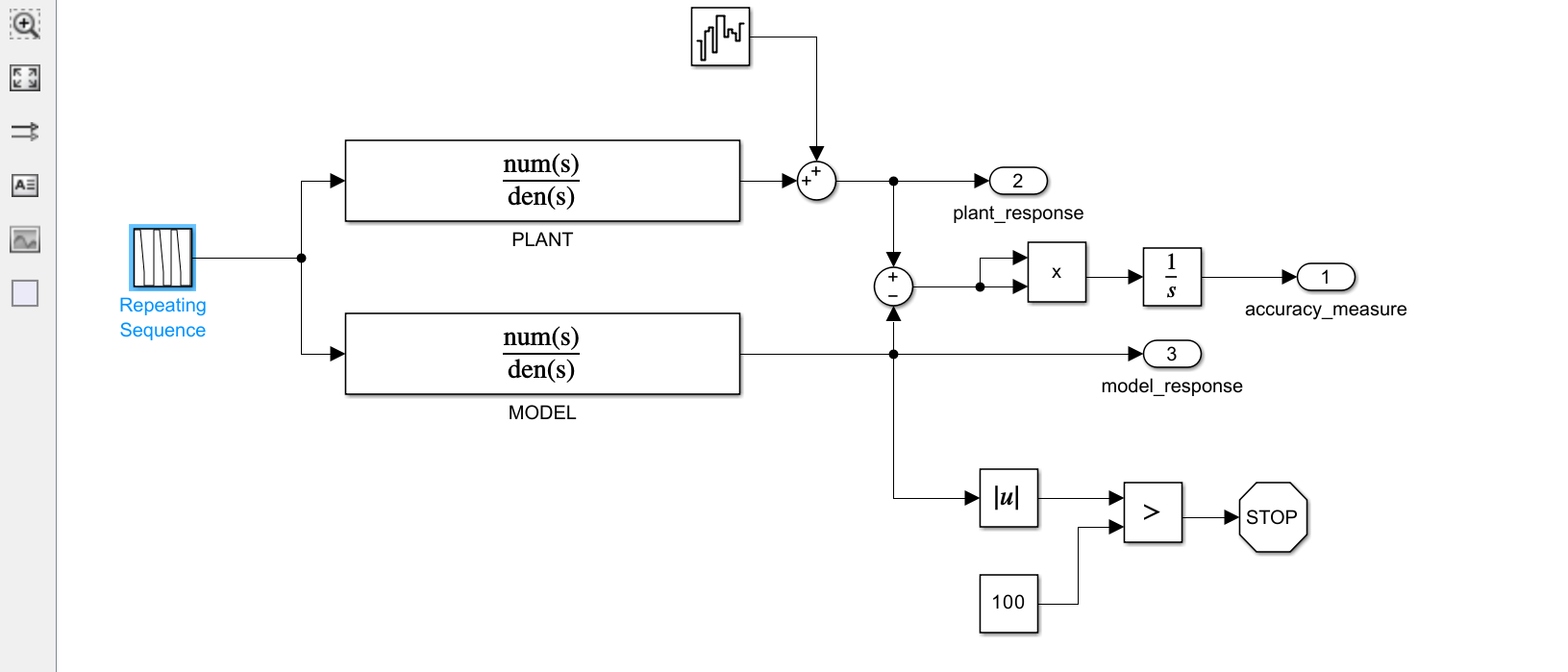
第二部分介绍非平稳重复过程的基本模型和参数辨识问题的描述;第三部分详细阐述基于 DOP 粒子群算法的参数辨识与跟踪原理;第四部分介绍系统的配置与实现方式,包括标志位的设置和粒子群更新规则的切换;第五部分通过仿真实验验证所提方法的有效性和优越性;第六部分对本文进行总结,并展望未来的研究方向。
二、非平稳重复过程模型与参数辨识问题描述
2.1 非平稳重复过程模型
非平稳重复过程可以描述为一系列重复执行的任务,每个任务在执行过程中其参数会随着时间发生变化。设重复过程由 N 个重复周期组成,在第 k 个重复周期中,系统的状态方程和输出方程可以表示为:
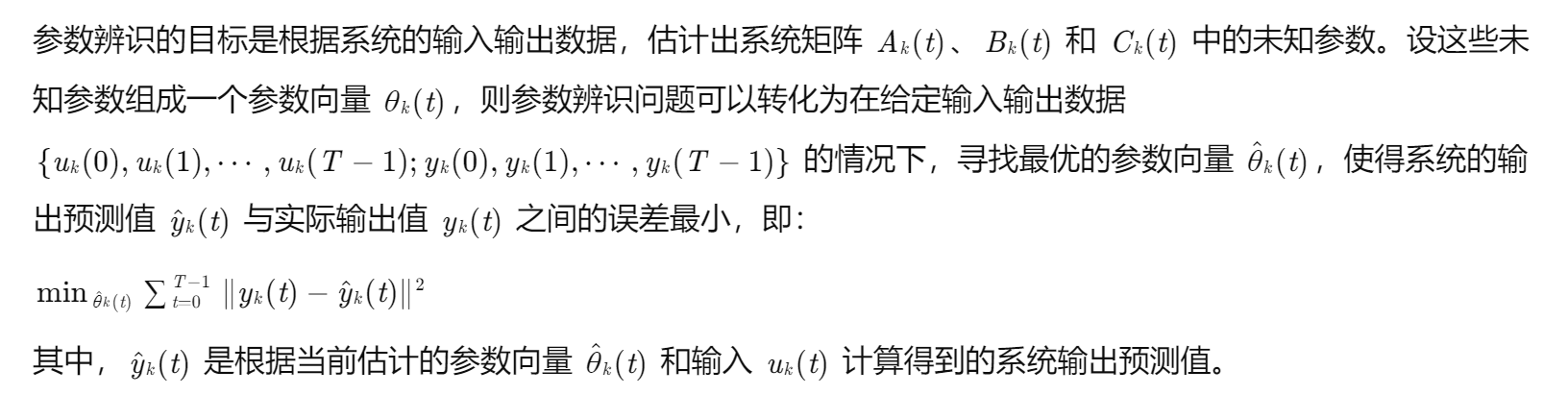
2.2 参数辨识问题描述
2.3 非平稳性带来的挑战
非平稳重复过程的参数随时间和周期变化,这使得传统的参数辨识方法难以直接应用。传统的参数辨识方法通常假设系统是平稳的,即系统参数在辨识过程中保持不变。然而,在非平稳重复过程中,参数的变化会导致辨识模型的失配,从而影响参数辨识的准确性和实时性。因此,需要研究一种能够适应参数变化的实时参数辨识与跟踪方法。
三、基于 DOP 粒子群算法的参数辨识与跟踪原理
3.1 粒子群算法基本原理
粒子群算法是一种模拟鸟类群体行为的优化算法。在粒子群算法中,每个粒子代表优化问题的一个潜在解,粒子通过不断调整自己的速度和位置来搜索最优解。设粒子群由 M 个粒子组成,第 i 个粒子在 d 维搜索空间中的位置为 xi=(xi1,xi2,⋯,xid),速度为 vi=(vi1,vi2,⋯,vid)。粒子在搜索过程中会记录自己迄今为止找到的最优位置 pbesti=(pbesti1,pbesti2,⋯,pbestid),以及整个粒子群迄今为止找到的最优位置 gbest=(gbest1,gbest2,⋯,gbestd)。粒子的速度和位置更新公式如下:

其中,w 是惯性权重,c1 和 c2 是加速常数,r1dk 和 r2dk 是 [0,1] 之间的随机数,k 表示迭代次数。
3.2 具备动态优化能力(DOP)的粒子群算法
为了使粒子群算法能够更好地适应非平稳重复过程的参数变化,本文引入具备动态优化能力(DOP)的粒子群算法。DOP 粒子群算法在传统粒子群算法的基础上,增加了动态调整策略,能够根据系统的动态变化实时调整粒子的搜索行为。具体来说,DOP 粒子群算法通过监测系统的输出误差变化情况,动态调整惯性权重 w、加速常数 c1 和 c2 等参数,以提高算法的收敛速度和全局搜索能力。
例如,当系统的输出误差较大时,说明当前估计的参数与真实参数相差较大,此时可以增大惯性权重 w 和加速常数 c1、c2,使粒子具有更强的全局搜索能力,快速找到更优的参数估计值;当系统的输出误差较小时,说明当前估计的参数已经比较接近真实参数,此时可以减小惯性权重 w 和加速常数 c1、c2,使粒子在局部范围内进行精细搜索,进一步提高参数估计的准确性。
3.3 基于 DOP 粒子群算法的参数辨识与跟踪过程
基于 DOP 粒子群算法的参数辨识与跟踪过程如下:
- 初始化粒子群:随机生成 M 个粒子的初始位置和速度,每个粒子的位置代表一个参数向量 θi,i=1,2,⋯,M。
- 计算适应度值:根据当前粒子的位置(参数向量),计算系统的输出预测值 y^k(t),并计算适应度值 Ji=∑t=0T−1∥yk(t)−y^k(t)∥2,适应度值越小表示参数估计越准确。
- 更新个体最优和全局最优:对于每个粒子,比较当前适应度值 Ji 和个体最优适应度值 pbesti,如果 Ji<pbesti,则更新 pbesti 和 pbesti 对应的参数向量;比较所有粒子的当前适应度值 Ji,找出最小的适应度值 gbest,并更新全局最优位置 gbest 和对应的参数向量。
- 动态调整算法参数:根据系统的输出误差变化情况,动态调整惯性权重 w、加速常数 c1 和 c2 等参数。
- 更新粒子速度和位置:根据更新后的算法参数,使用粒子群算法的速度和位置更新公式更新每个粒子的速度和位置。
- 判断终止条件:如果满足终止条件(如达到最大迭代次数或适应度值小于预设阈值),则停止迭代,输出全局最优参数向量作为参数估计结果;否则,返回步骤 2 继续迭代。
3.4 控制器增益重新整定
当控制器增益被定义为待跟踪参数的已知函数时,在得到参数估计结果后,可以根据该函数重新整定控制器增益。设控制器增益 Kk(t) 是参数向量 θk(t) 的已知函数,即 Kk(t)=f(θk(t)),则在得到参数估计值 θ^k(t) 后,可以计算得到重新整定后的控制器增益 K^k(t)=f(θ^k(t)),从而实现控制器增益的实时调整,提高系统的控制性能。
四、系统配置与实现方式
4.1 标志位设置
为了方便用户快速切换不同系统配置,本文设计了若干标志位。这些标志位可以用于控制粒子群算法的不同参数设置、系统模型的选择以及输出信息的显示等。例如,可以设置一个标志位来选择不同的粒子群更新规则,另一个标志位来控制是否显示迭代过程中的详细信息等。通过修改这些标志位的值,用户可以轻松地重配置系统,满足不同的实验需求。
4.2 粒子群更新规则切换
本文受“即插式直接粒子群重复控制器”启发,提供了多种粒子群更新规则供用户选择。不同的更新规则适用于不同的系统场景和优化问题。例如,标准粒子群更新规则适用于一般的优化问题,具有简单易实现的特点;而一些改进的粒子群更新规则,如带有收缩因子的粒子群更新规则、自适应粒子群更新规则等,在处理复杂优化问题时具有更好的性能。用户可以根据实际需求,通过设置标志位来切换不同的粒子群更新规则,以提高参数辨识与跟踪的效果。
五、仿真实验与结果分析
5.1 实验设置
为了验证所提方法的有效性和优越性,本文设计了一系列仿真实验。选择一个典型的非平稳重复过程模型作为实验对象,该模型的参数在一定范围内随时间和周期变化。设置粒子群算法的参数,如粒子数量 M=50,最大迭代次数 kmax=100,惯性权重 w 的初始值为 0.9,加速常数 c1=c2=2 等。同时,设置不同的标志位值来测试不同系统配置和粒子群更新规则下的参数辨识与跟踪效果。
5.2 实验结果与分析
5.2.1 不同系统配置下的实验结果
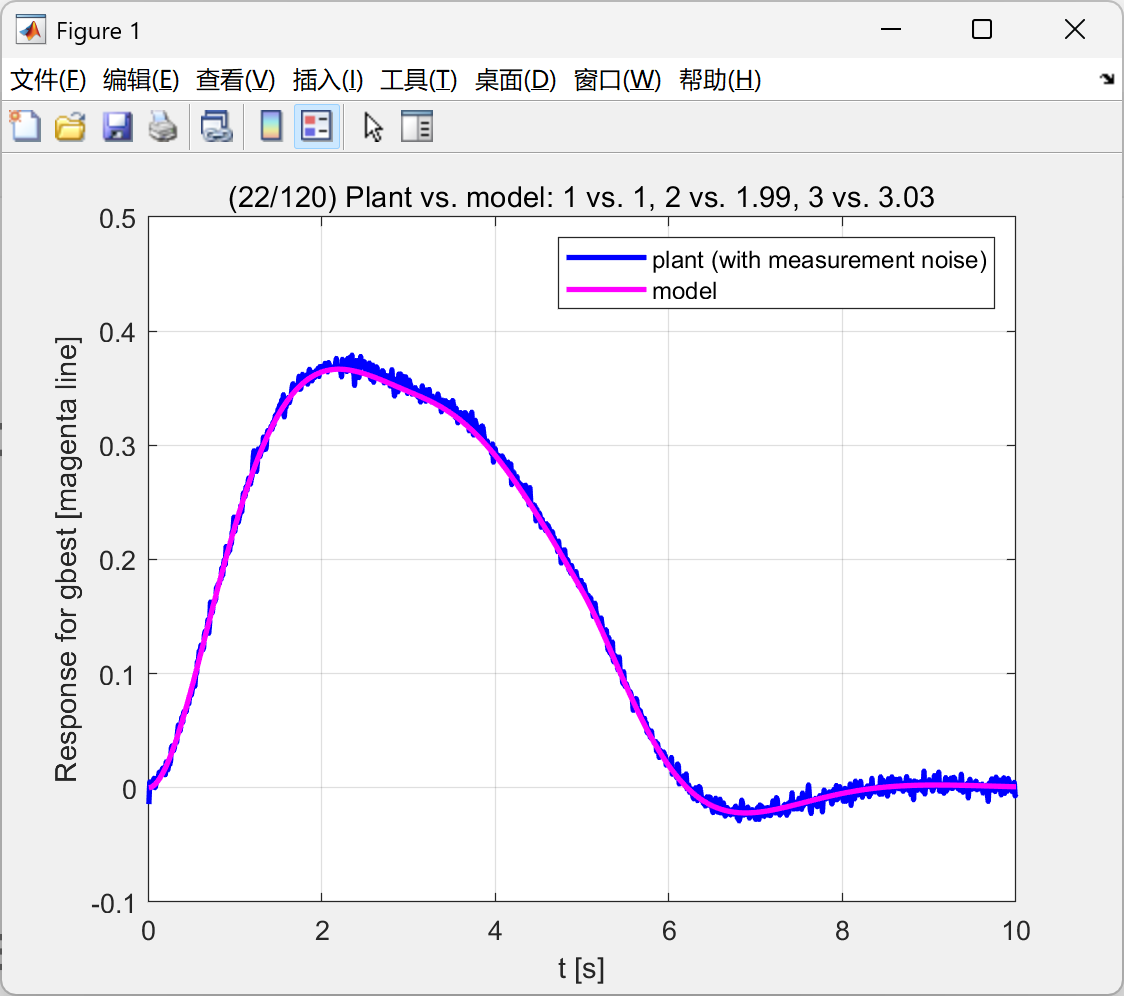
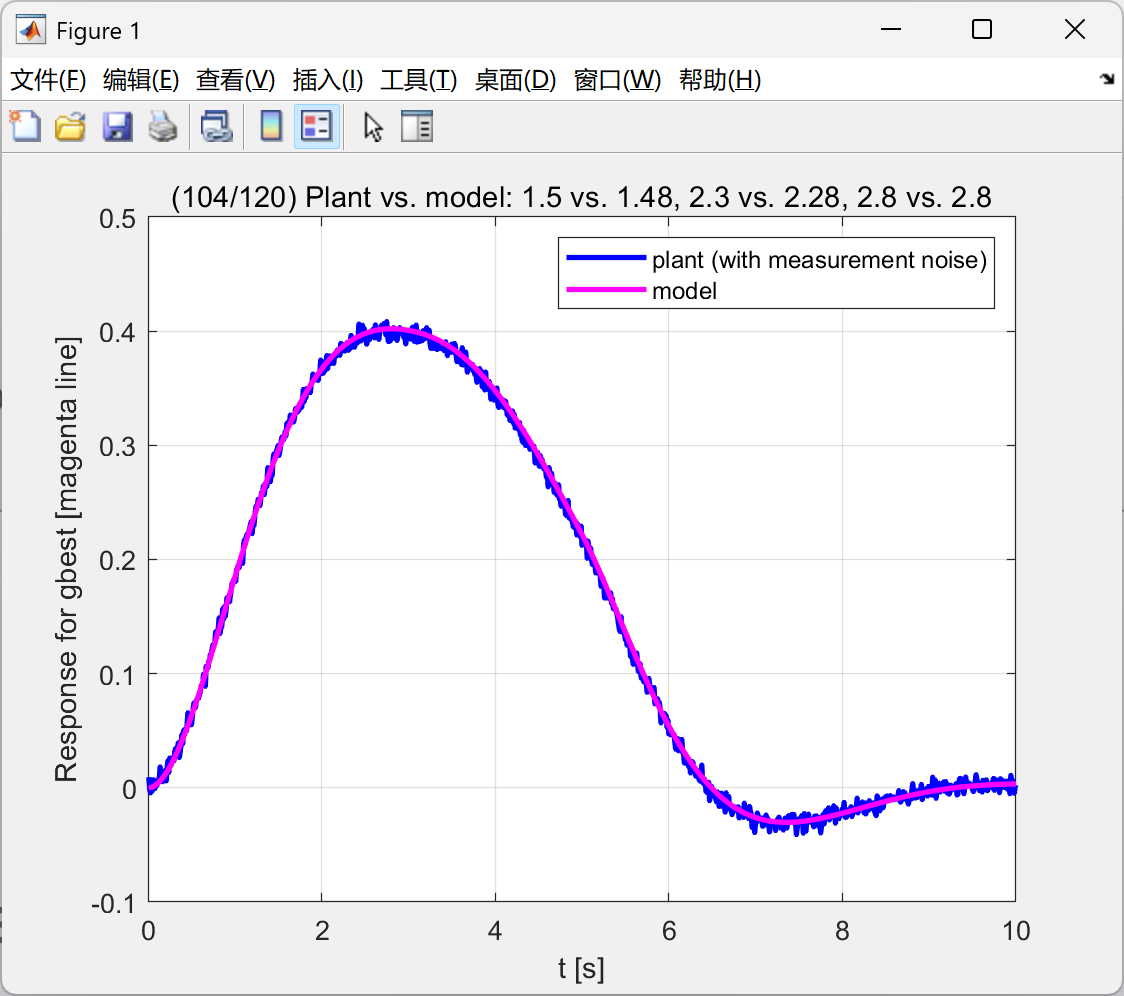
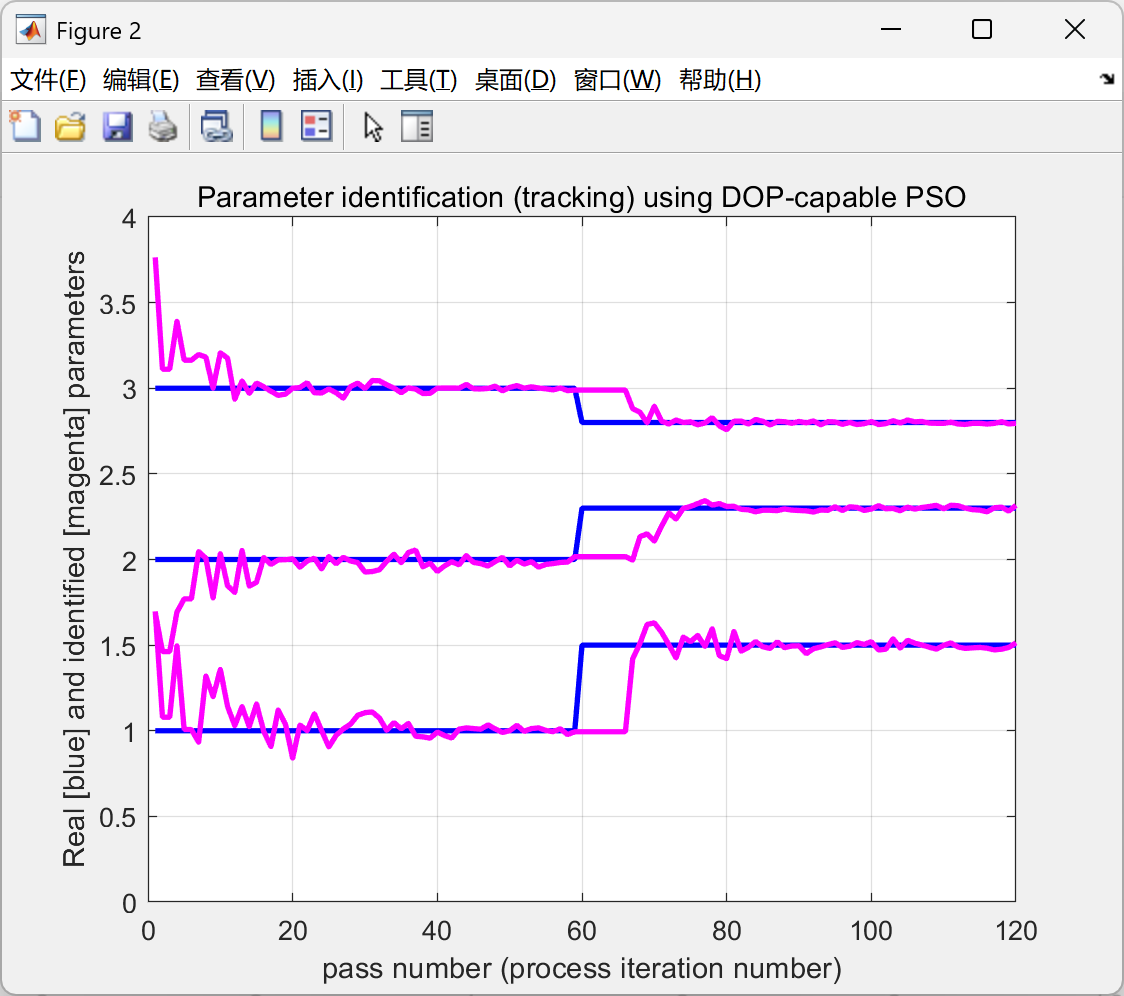
通过改变标志位的值,测试不同系统配置下的参数辨识与跟踪效果。实验结果表明,在不同的系统配置下,所提方法都能够有效地跟踪非平稳重复过程的参数变化,参数估计误差较小。例如,当选择不同的粒子群更新规则时,不同规则下的参数估计准确性和收敛速度有所差异,但都能够满足实际应用的要求。这说明所提方法具有良好的适应性和灵活性,能够根据不同的系统需求进行灵活配置。
5.2.2 与传统方法的对比实验
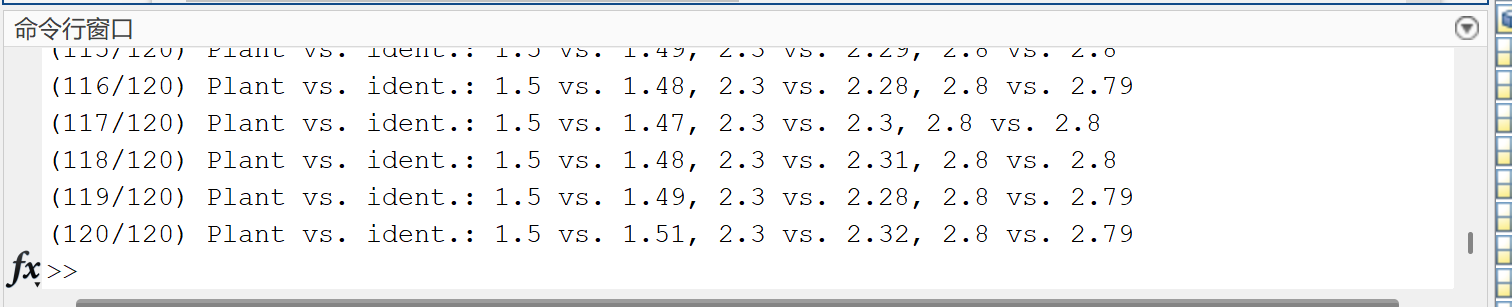
将所提方法与传统参数辨识方法(如最小二乘法)进行对比实验。实验结果显示,在处理非平稳重复过程时,传统方法由于无法适应参数的变化,参数估计误差较大,且收敛速度较慢。而所提的基于 DOP 粒子群算法的方法能够实时跟踪参数变化,参数估计准确性明显提高,收敛速度更快。这表明所提方法在非平稳重复过程参数辨识与跟踪方面具有显著的优势。
5.2.3 控制器增益重新整定效果验证
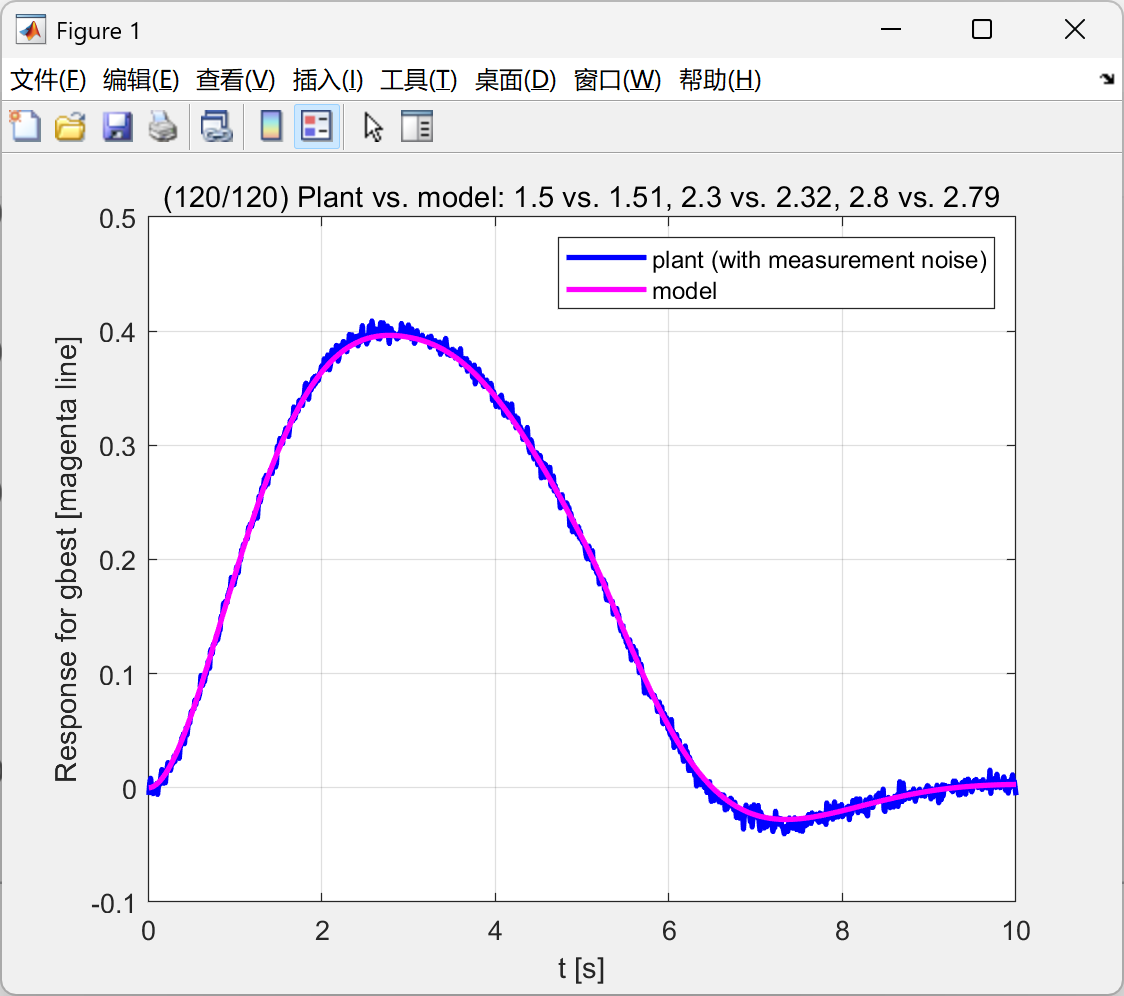
当控制器增益为待跟踪参数的已知函数时,验证控制器增益重新整定的效果。实验结果表明,在参数估计准确的基础上,通过重新整定控制器增益,系统的控制性能得到了显著提升。系统的输出能够更好地跟踪期望输出,超调量减小,调节时间缩短,说明所提方法能够有效地实现控制器增益的实时调整,提高系统的控制精度和稳定性。
六、结论与展望
6.1 结论
本文提出了一种基于具备动态优化能力(DOP)的粒子群算法的非平稳重复过程参数辨识与跟踪方法。该方法能够实时跟踪非平稳重复过程的参数变化,并在控制器增益为待跟踪参数的已知函数时,实现增益的重新整定。通过设置标志位,可以快速切换不同系统配置和粒子群更新规则,提高了方法的灵活性和适应性。仿真实验结果表明,所提方法在参数辨识准确性、收敛速度和控制性能提升等方面都具有显著优势,适用于重复过程参数辨识、迭代学习估计、动态优化问题以及基于种群的进化优化等领域,尤其对于参数随时间变化的机器人与电力电子系统具有重要的应用价值。
6.2 展望
未来的研究可以从以下几个方面展开:一是进一步优化 DOP 粒子群算法的动态调整策略,提高算法在复杂非平稳环境下的性能;二是将所提方法应用于更多实际工程系统中,验证其在实际应用中的有效性和可靠性;三是研究如何结合其他智能优化算法,如遗传算法、蚁群算法等,进一步提高参数辨识与跟踪的精度和效率。
📚第二部分——运行结果
部分代码:
%% Initialization
clear all
% Tidying up
close all hidden
wanna_movie = 1;
% 0 to skip movie production
% 1 to produce movie
rng('shuffle');
t_stop = 10;
Ts = 0.01;
asur = 1; % 1 --> the asynchronous update rule; 0 --> the synchronous update rule
update_without_evaluation = 0; % 1 --> some "funny" way to update particles -- beneficial or deleterious? Don't know yet.
% 0 --> standard ASUR
totally_random_start = 1; % 1 --> initial positions are randomized within [-init_position, init_position]
% and it may happen that the algorithm will fail
% 0 --> initial positions within [0.5*actual_value, 1.5*actual_value]
% and it is more realistic scenario because we usually have some rough knowledge about the plant dynamics.
evaporation_constant = 1.05;
🎉第三部分——参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
🌈第四部分——本文完整资源下载
资料获取,更多粉丝福利,MATLAB|Simulink|Python|数据|文档等完整资源获取


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









