 动态系统故障诊断与容错控制研究及Matlab实现
动态系统故障诊断与容错控制研究及Matlab实现




💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文内容如下:🎁🎁🎁
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
摘要
随着现代工业和科技的飞速发展,动态系统在航空航天、电力系统、工业自动化、轨道交通等领域的应用日益广泛。这些系统的复杂性和对安全性、可靠性的高要求促使故障诊断和容错控制技术成为研究热点。本文旨在探讨动态系统故障诊断和容错控制的基本概念、技术分类、常用方法及其在实际应用中的案例分析,同时指出当前方法存在的问题与挑战,并展望未来的发展方向。
1. 引言
动态系统是指其状态随时间变化的系统,广泛应用于各种工业领域。由于系统复杂性增加、外部环境干扰以及部件老化等因素,动态系统在运行过程中难免会发生故障。这些故障可能导致系统性能下降,甚至引发灾难性事故。因此,对动态系统进行实时故障诊断和容错控制,确保系统在故障发生时仍能维持稳定运行,具有重要的理论意义和实际应用价值。
2. 故障诊断基础理论
2.1 故障类型与模式
故障类型包括硬件故障、软件故障、传感器故障、执行器故障等。故障模式则描述了故障的具体表现形式,如突变的偏差(加性故障)和参数或结构变化(乘性故障)。
2.2 故障机理分析
通过深入理解系统的物理原理和工作过程,推导出不同故障类型的可能原因,为诊断策略提供依据。
2.3 建立数学模型
根据系统结构和参数,建立精确或近似的数学模型,用于仿真模拟和故障预测。
2.4 数据采集与处理
数据采集是故障诊断的基础,需要对设备的各种参数进行实时监控,包括温度、压力、振动等。这些数据经过适当的预处理(如滤波、去噪、标准化等)后,可用于故障诊断分析。
2.5 信号处理与特征提取
对采集到的数据进行信号处理,提取故障敏感特征。常用的信号处理方法包括时域分析(均值、方差)、频域分析(傅里叶变换)以及小波变换等。深度学习模型(如CNN、LSTM)也可用于自动学习特征。
2.6 故障模式识别
根据特征提取的结果,采用模式识别方法(如支持向量机、随机森林)或基于模型的方法(参数估计、状态估计)确定故障类型和位置。
2.7 故障诊断决策
基于故障模式识别结果,制定相应的故障诊断决策,包括故障等级评估、故障原因分析、故障维修策略等。
3. 容错控制基本概念
容错控制是一种通过设计冗余系统和故障检测、诊断以及隔离机制,以提高系统可靠性和可用性的控制策略。其主要目标是在系统发生故障时,能够及时识别并隔离故障部分,通过切换到备用系统或采取适当的补偿措施,保证系统的正常运行。容错控制策略主要包括硬件冗余、软件冗余和混合冗余。
4. 故障诊断技术分类
4.1 基于模型的故障诊断技术
通过建立系统数学模型,利用系统辨识方法提取故障特征参数,实现故障识别和定位。常用方法包括状态空间分析法、模型预测控制和能量平衡法。
4.2 统计方法
通过对系统运行过程中的大量数据进行分析,提取故障信息。常用方法包括参数估计与假设检验、时间序列分析和统计过程控制(SPC)。
4.3 知识驱动方法
利用专家的知识和经验,通过规则推理或案例推理等方式识别故障。专家系统是知识驱动方法的典型应用。
4.4 数据驱动方法
基于大数据分析和人工智能技术,通过从历史数据中提取模式和特征,实现对动态系统的状态监测和故障预测。常用方法包括机器学习(如SVM、随机森林)和深度学习(如CNN、LSTM)。
5. 常用故障诊断方法介绍
5.1 基于观测器的方法
通过设计观测器或滤波器(如卡尔曼滤波器、滑模观测器),比较系统实际输出与预期输出的差异,生成残差信号。残差偏离零值表明潜在故障。
5.2 基于参数估计的方法
通过对系统参数的估计和假设检验,确定参数的变化是否符合预期,从而检测系统是否有故障发生。
5.3 基于信号处理的方法
利用时域分析、频域分析和小波变换等方法提取故障特征信号。
5.4 基于深度学习的方法
利用CNN、LSTM等深度学习模型自动学习数据中的复杂模式,实现高效的故障诊断。
6. 容错控制策略研究
6.1 被动容错控制
采用固定的控制器来保证闭环系统稳定,无需故障诊断系统的支持。被动容错控制可分为可靠镇定、完整性和联立正定三种类型。
6.2 主动容错控制
在故障发生后,根据故障信息重新调整控制器参数或改变控制器结构。主动容错控制可分为控制律重新调度、控制器重构设计和模型跟随重组控制三大类。
7. 实际应用案例分析
7.1 风电发电系统故障诊断
风电发电系统由风力发电机、变流器、升压变压器等多个部分组成。通过安装传感器实时监测各部件的温度、电压、电流等参数,并利用数据采集与处理、信号处理与特征提取、故障模式识别等技术对故障进行判断和预测。
7.2 飞机舵面故障容错控制
当飞机舵面发生故障时,通过剩余舵面重新分配升力,实现容错控制,确保飞机安全飞行。
7.3 工业电机故障诊断
通过电流谐波分析检测轴承磨损等故障,提前采取维护措施,降低运营成本和风险。
8. 现有方法存在问题与挑战
8.1 数据质量问题
数据中的噪声、缺失值、异常值等因素可能导致诊断模型性能下降。
8.2 模型可解释性不足
尽管数据驱动方法在诊断精度上具有优势,但其内部机制的可解释性不足,限制了其在某些领域的应用。
8.3 实时性要求
实时性要求过高时,数据驱动方法可能无法满足需求。
8.4 系统扩展性与维护性
数据驱动诊断方法通常需要针对具体系统进行定制化设计,系统扩展和维护难度较大。
9. 未来发展方向与趋势
9.1 深度学习与物联网融合
随着物联网和大数据技术的发展,数据将更加智能化地进行网络化和共享。深度学习模型将能够自动学习数据中的复杂模式,实现更高效的故障诊断。
9.2 个性化与定制化诊断
未来,数据驱动诊断方法将更加注重个性化和定制化,以满足不同用户和系统的需求。
9.3 混合诊断方法
结合基于模型的方法和数据驱动方法的优点,开发混合诊断方法,提高诊断精度和鲁棒性。
9.4 智能化容错控制
随着人工智能技术的发展,容错控制策略将更加智能化,能够自适应地调整控制参数和结构,以应对未知故障和复杂环境。
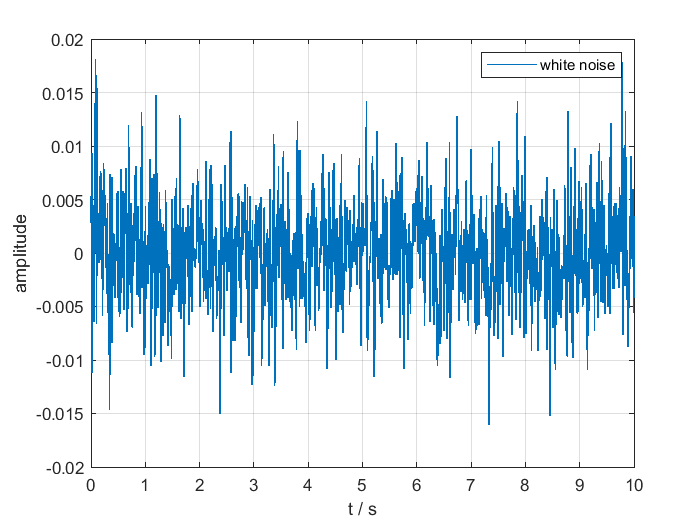
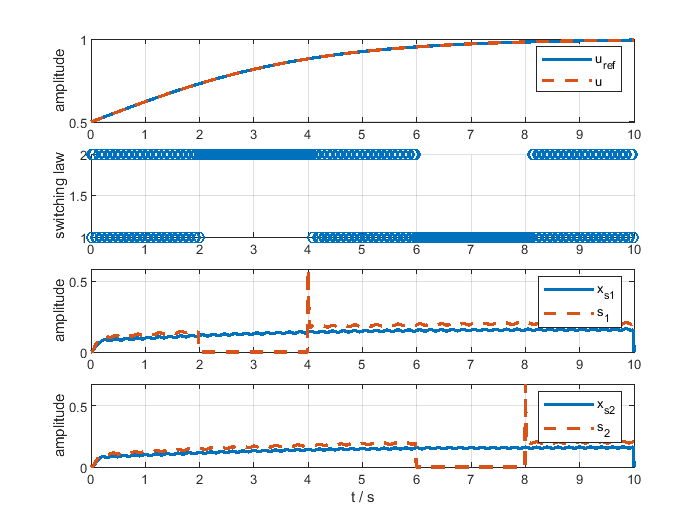
📚2 运行结果
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
[1]. Seron M M, Zhuo X W, De Dona J A, et al. Multisensor switching control
strategy with fault tolerance guarantees[J]. Automatica, 2008, 44(1): 88-97.
[2]. Xu F, Puig V, Ocampomartinez C, et al. Set-theoretic methods in robust detection
and isolation of sensor faults[J]. International Journal of Systems Science, 2015,
46(13): 2317-2334.
[3]. Mi Y, Xu F, Tan J, et al. Fault-tolerant control of a 2-DOF robot manipulator
using multi-sensor switching strategy[C]. chinese control conference, 2017:
7307-7314.
🌈4 Matlab代码实现
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取


















 867
867

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









