



💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文内容如下:🎁🎁🎁
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
摘要:单光子激光探测与测距(light detection and ranging,lidar)技术具备单光子灵敏度和皮秒级时间分辨率,这对于实现远距离高精度三维(3D)成像而言十分理想。尽管已取得重要进展,但要进一步拓展成像距离仍面临巨大挑战,因为只有少量回波光子返回,且会与强噪声混合。在此,我们通过构建高效、低噪声的同轴单光子激光雷达系统,并开发出一种适用于远距离成像的计算算法,该算法具备高光子效率和良好的抗噪声能力,从而解决了这些挑战。利用这项技术,我们在城市环境中进行了实验验证,实现了距离长达45公里的主动单光子三维成像,且每个像素的回波信号水平低至约1个光子。通过优化系统配置,我们的系统具备在数百公里距离下成像的可行性,因此,这代表着向超远距离低功耗、高分辨率激光雷达迈进了一步。
关键词:光子激光雷达 回波
一、研究背景与意义
单光子激光雷达(Lidar)技术凭借其单光子级的信号灵敏度和皮秒级的时间分辨率,在远距离高精度三维成像领域展现出巨大潜力。然而,随着成像距离的增加,从目标返回的信号光子数量急剧减少,同时受到大气扰动、散射以及太阳背景噪声等多重因素的影响,导致信噪比极低,成像难度显著增加。因此,如何在极低光子水平下实现高精度、高分辨率的三维成像,成为当前激光雷达领域的研究热点和难点。
在45公里距离下实现单光子计算三维成像,不仅验证了该技术在实际应用中的可行性,还为远距离目标识别、地形测绘、环境监测等领域提供了新的技术手段。此外,该研究对于推动单光子激光雷达技术的进一步发展,提升我国在远距离激光成像领域的国际竞争力具有重要意义。
二、研究内容与方法
1. 系统搭建
为了实现45公里距离下的单光子三维成像,研究团队搭建了一套高效率、低噪声的同轴扫描收发系统。该系统采用高性能的单光子探测器,如铟镓砷(InGaAs)单光子雪崩二极管(SPAD),以实现对微弱回波光子信号的高灵敏度探测。同时,系统还配备了精密的光学控制元件,如近衍射极限的收发一体光学系统,以实现对光束的精确控制和高效收集。
2. 算法开发
针对远距离成像中信噪比极低的问题,研究团队开发了一套适配于远距离的计算成像算法。该算法主要包括以下几个方面:
- 去噪与滤波:采用先进的去噪算法,如块匹配和三维滤波(BM3D),以及基于马尔科夫链的自适应高斯滤波等,有效抑制背景噪声,提高信噪比。
- 光子序列估计:利用科茨估计等算法从测量直方图中恢复入射光子序列,以缓解光子堆积效应带来的信号失真。
- 反卷积算法:通过设计反卷积算法,解决远距离成像中的分辨率问题。该算法能够准确识别出光斑中的内容,提高成像分辨率。
- 时间滤波技术:原创性地发展了时间滤波抑制噪声技术,进一步提高信噪比,使系统能够在极低光子水平下实现高精度成像。
3. 实验验证
研究团队在上海崇明岛对上海市区另一座大楼进行了拍摄实验。实验过程中,雾霾天气严重,用望远镜的能见度大概只有3到5公里。然而,通过该团队的技术,成功实现了45公里距离下的单光子三维成像。实验结果表明,该系统能够在极低光子水平下(平均每个像素约1个光子)实现高精度的三维成像,成像分辨率达到0.5米。
三、研究成果与创新点
1. 突破成像距离纪录
该研究成功实现了45公里距离下的单光子三维成像,突破了此前由英国哈利瓦特大学保持的10公里最远距离纪录。这一成果标志着我国在远距离单光子成像领域取得了重要突破。
2. 高灵敏度与高分辨率
该系统具有极高的光子效率和超分辨能力,能够在极低光子水平下实现高精度的三维成像。实验结果表明,成像分辨率达到0.5米,能够清晰识别出高楼窗户的轮廓以及窗户是单扇还是双扇等细节信息。
3. 创新算法与技术
研究团队开发了一套适配于远距离的计算成像算法,包括去噪与滤波、光子序列估计、反卷积算法以及时间滤波技术等。这些算法和技术有效解决了远距离成像中的信噪比低、分辨率差等问题,为单光子激光雷达技术的进一步发展提供了有力支持。
4. 全天时成像能力
该系统具有全天时成像能力,能够在白天和晚上以及不同天气条件下实现稳定的三维成像。这一特点使得该系统在实际应用中具有更广泛的适用性和更高的可靠性。
四、应用前景与展望
1. 远距离目标识别
该技术可用于远距离目标识别领域,如对空中、海上或地面目标进行高精度三维成像和识别。这对于国防安全、边境监控等领域具有重要意义。
2. 地形测绘与环境监测
该技术可用于地形测绘和环境监测领域,如对山脉、河流、森林等自然地貌进行高精度三维成像和测绘。同时,还可用于监测环境污染、气候变化等环境问题。
3. 自动驾驶与非视域成像
随着自动驾驶技术的不断发展,对高精度、远距离的三维成像技术需求日益增加。该技术可为自动驾驶车辆提供更远距离、更高精度的环境感知能力。此外,该技术还可用于非视域成像领域,如通过计算光子在墙面的散射和飞行过程来复原出视线外物体的三维图像。
📚2 运行结果
部分代码:
for ii =1:2
%load data
load(['./data/' foldername{ii}]);
fprintf('* Finished loading the data %s \n', foldername{ii});
% reconstruction
pixelwise_ML_reconstruction; % pixelwise ML recosntruction method
fprintf('* Finished processing the data %s with the pixelwise ML method \n', foldername{ii});
deconvolution_reconstruction; % our proposed reconstruction method
fprintf('* Finished processing the data %s with our proposed method \n \n', foldername{ii});
end
%% Plot the final results
load('./data/Colormap_for_45km','mycmap');
figure;
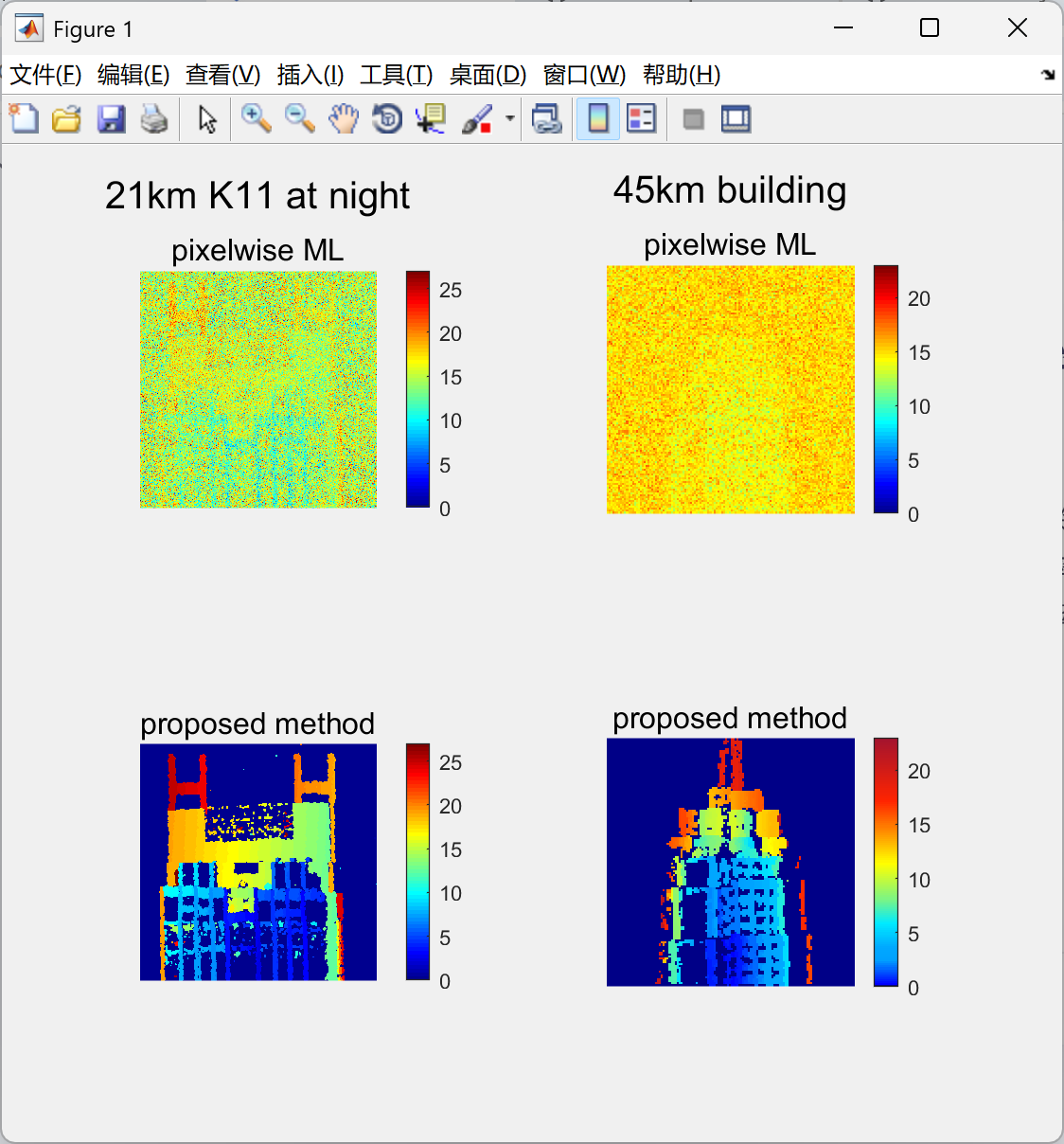
h1 = subplot(2,2,1); imagesc(depth_pixelwiseML{1}, [0 27]);axis image;axis off;colorbar;colormap jet;
h2 = subplot(2,2,2); imagesc(depth_pixelwiseML{2}, [0 23]);axis image;axis off;colorbar;colormap(h2, mycmap);
h3 = subplot(2,2,3); imagesc(depth_proposed{1}, [0 27]);axis image;axis off;colorbar;colormap jet;
h4 = subplot(2,2,4); imagesc(depth_proposed{2}, [0 23]);axis image;axis off;colorbar;colormap(h4, mycmap);
title(h1, {'\fontsize{15}21km K11 at night'; '\fontsize{12}pixelwise ML'});
title(h3, '\fontsize{12}proposed method');
title(h2, {'\fontsize{15}45km building'; '\fontsize{12}pixelwise ML'});
title(h4, '\fontsize{12}proposed method');🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
[1]孔伟斌.基于近红外单光子探测技术的三维成像研究[J].华东师范大学, 2013.
[2]郑素珍,陈普春.复杂目标的单光子三维成像数据模拟方法[J].应用激光, 2024, 44(1):134-143.
🌈4 Matlab代码实现
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取


















 395
395

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









