




 该博客介绍了如何使用C++在ROS中手动创建消息发布器和订阅器。步骤包括创建package、定义msg文件、修改CMakeLists.txt、编写talker和listener代码,以及编译和运行程序。示例中涉及到topic_demo包,包含gps类型的消息,通过nh.advertise和n.subscribe函数实现消息的发布和订阅。
该博客介绍了如何使用C++在ROS中手动创建消息发布器和订阅器。步骤包括创建package、定义msg文件、修改CMakeLists.txt、编写talker和listener代码,以及编译和运行程序。示例中涉及到topic_demo包,包含gps类型的消息,通过nh.advertise和n.subscribe函数实现消息的发布和订阅。
ROS手动编写消息发布器和订阅器topic demo(C++)

1.首先创建 package
cd ~/catkin_ws/src
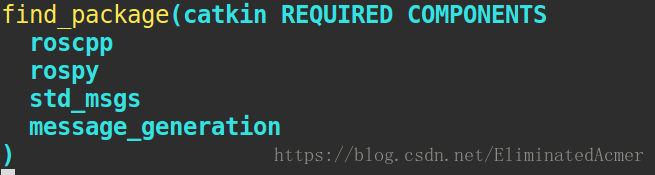
catkin_create_pkg topic_demo roscpp rospy std_msgs
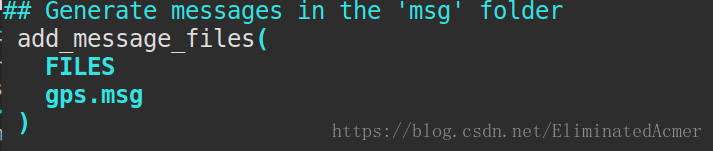
2. 编写 msg 文件
cd topic_demo mkdir msg cd msg vim gps.msg
将以下代码写入:
float32 x float32 y string state
x 是横坐标,y 是纵坐标,state 是状态
还记得以前说的吗:点击打开链接
修改 package.xml 文件:

<build_depend>message_generation</build_depend> <exec_depend>message_runtime</exec_depend>
其中 exec_time 也可能是 run_time,看原来的 package.xml 怎么写的。
修改 CMakeLists.txt:

接下来进入工作空间:
cd ~/catkin_ws
编译:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 785
785

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









