



引言
在智能汽车高速发展的今天,车载以太网作为车辆信息交互的“神经网络”,承担着传输海量数据的关键使命。它不仅能够满足车辆对高带宽、低延迟和高可靠性的通信需求,还为自动驾驶、智能座舱等复杂功能提供了强大的技术支持。然而,随着车载以太网应用的不断拓展,链路在高负载情况下的性能表现成为影响系统稳定性和用户体验的关键因素。
链路高负载率测试概述
以太网链路高负载率测试是一种用于评估网络在极端负载条件下的性能表现的测试方法。其目的是通过模拟高流量、高并发的数据传输场景,来衡量系统链路在高负载下的吞吐量、丢包率等关键性能指标。接下来,小编将分享基于CANoe如何实现链路高负载率测试。
基于CANoe实现链路高负载率测试步骤
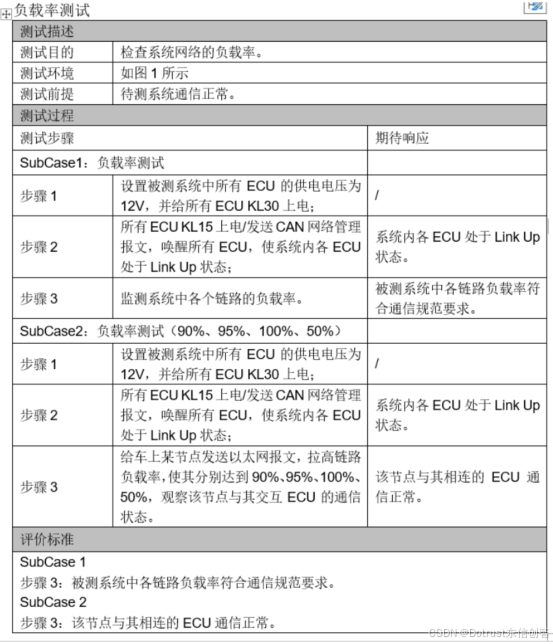
测试规范
链路高负载率测试主要包含正常通信状态下链路负载情况的测试,以及负载率达到50%、90%、95%、100%时链路的通信情况。
测试拓扑
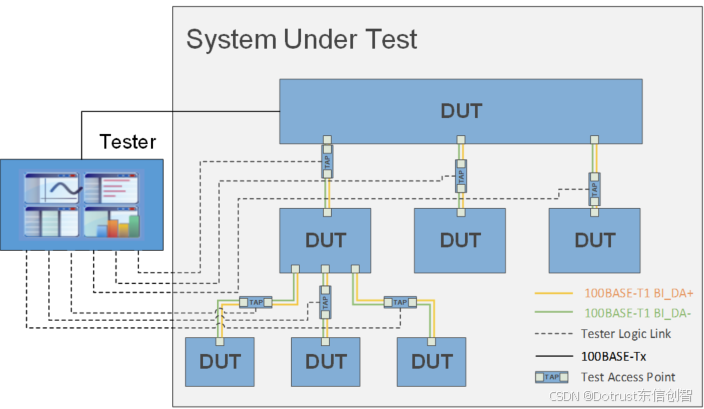
测试准备
在进行链路高负载率测试之前,首先需要搭建测试环境。测试环境包括被测件(DUT)、VN设备、测试电脑、CANoe软件等。
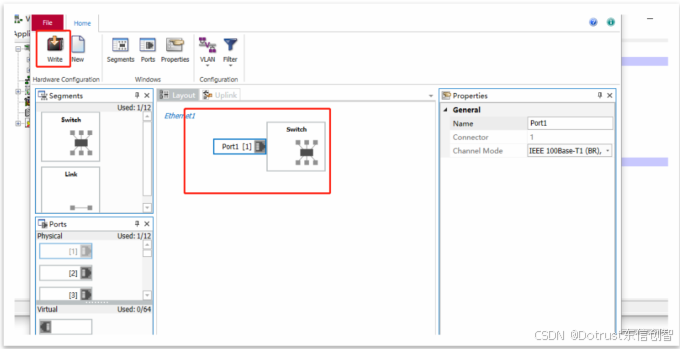
配置CANoe测试工程
打开CANoe软件,进入到Vector HardwareConfiguration下配置通道,添加与DUT相连的端口,完成之后点击Write编译。
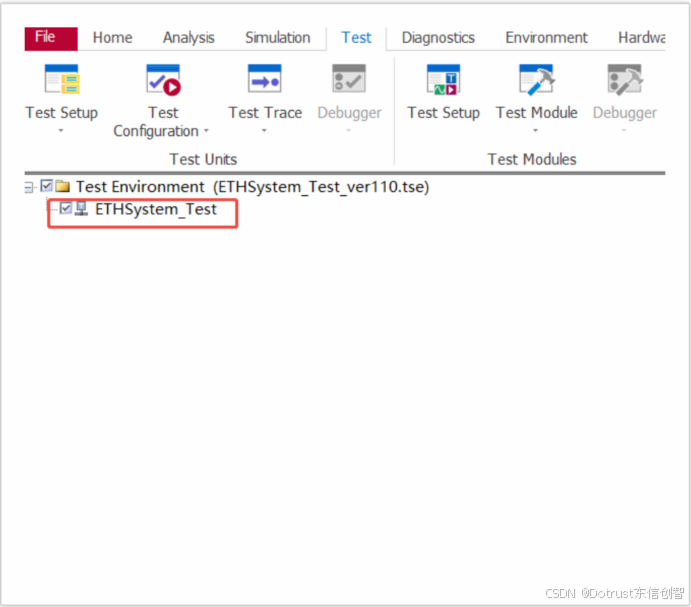
在CANoe中,需要创建一个新的测试工程,并配置相关的网络节点和消息。
- 创建测试工程:在CANoe中,选择“File”->“New”->“Project”,创建一个新的测试工程。
- 配置测试节点:在Test Setup模块下,添加用于测试的Test Module。
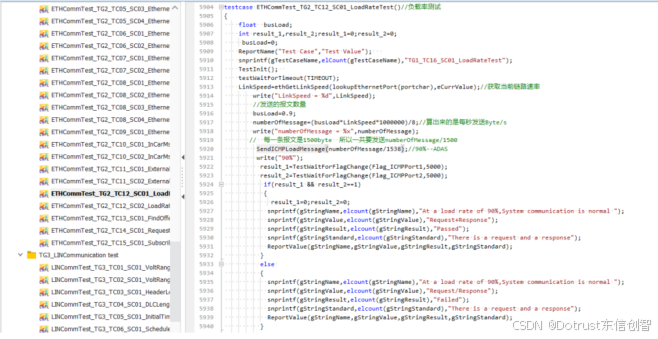
编写测试脚本
在CANoe中,可以使用CAPL(CAN Access Programming Language)编写测试用例。
我们按照测试规范步骤发送测试指令、接收测试结果,并判断测试结果是否符合预期。如果测试结果不符合预期,CANoe将记录错误信息,并允许用户查看和分析测试结果。
执行测试
在配置好测试工程和测试脚本后,可以开始执行测试。点击开始,执行测试用例。

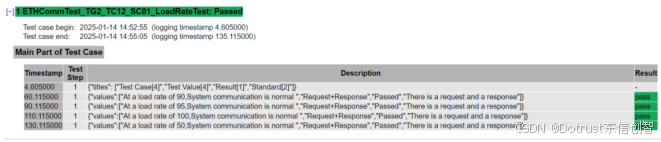
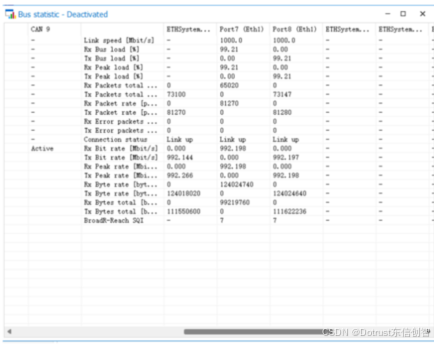
分析测试结果
测试完成后,需要分析测试结果。在对应的文件夹下,根据测试的日期和时间在文件中查看对应的测试日志和测试结果报告。
总结
高负载率测试是车载以太网从“可用”到“可靠”的必经之路。随着智能驾驶领域的不断发展,网络系统面临的负载压力呈现出显著增长的趋势。通过高负载测试,车企不仅能提前暴露潜在风险,更能为软件定义汽车(SDV)时代的动态资源分配奠定基础。本文为系列文章,后面还会继续推出故障注入、系统时间同步等测试内容,敬请期待!


















 537
537

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









