



在自动驾驶技术迈向落地的征途上,“安全”是永恒不变的核心命题。为了确保一辆自动驾驶汽车能在瞬息万变的真实世界中做出正确、安全的决策,就需要进行海量的道路测试。但实车道路测试成本高昂、风险巨大且难以穷尽所有可能性,所以高精度、高效率的仿真测试成为了不可或缺的关键环节。然而,在自动驾驶仿真测试的虚拟场景中,场景要素如同空气般无处不在,其对自动驾驶功能的性能表现起着决定性作用。因此,本文将对自动驾驶仿真场景要素的分类及验证方法做出详细解释。
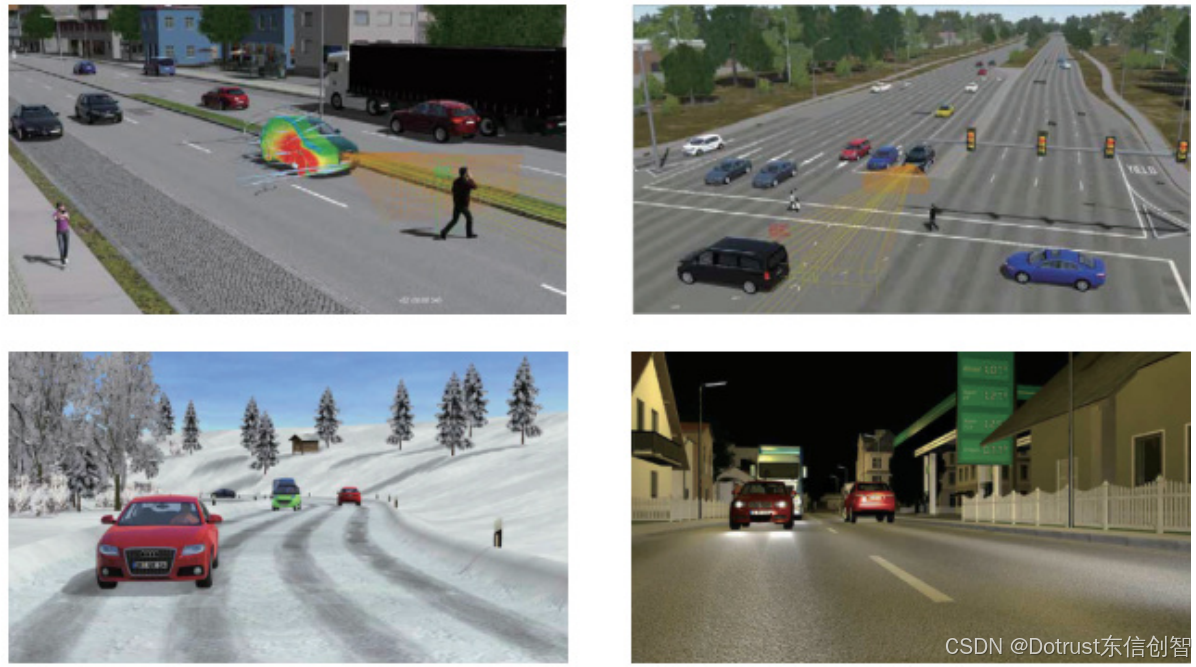
图1 不同场景要素场景仿真渲染图
1.场景要素的概念
在自动驾驶仿真测试中,“场景(Scenario)”并非一个模糊的概念,而是对现实世界中特定时间片段内驾驶环境的数字化描述,是自动驾驶车辆在特定条件下,与周围环境及其他交通参与者互动的一个完整片段,是测试其感知、决策、规划、控制等系统能力的“考场”。而场景要素(Scenario Elements),则是构成这个“考场”的最基本单元,是定义、描述和参数化一个场景所必需的重要组成部分,是验证一个场景的独特性、复杂性和测试价值的关键内容。在实际工程应用中,90%以上的自动驾驶功能失效案例都是关键场景要素的建模偏差所导致的。
2.场景要素的分类
在仿真测试领域,一个完整的场景由外部交通环境要素和自车任务要素两大核心维度构成,共同定义了自动驾驶车辆所处的“小宇宙”。
2.1外部交通环境要素
外部交通环境要素构成了自动驾驶功能运行的舞台背景,是场景中至关重要的组成部分。根据外部交通环境要素的基本属性又可分为三大类,分别是静态要素、动态要素和环境要素。
静态要素:直接影响着自动驾驶系统的路径规划能力。
- 道路类型:如高速公路、城市道路、乡村小路、道路摩擦系数等;
- 交通设施和标志:包括道路标线、路灯、交通信号灯、交通标识牌等;
- 周围景观与障碍物;如建筑物、地形、树木、静态障碍物等。
动态要素:对自动驾驶系统的感知和决策能力提出严峻挑战。
- 交通参与者:如车辆、行人、非机动车、动物等;
- 交通参与者行为:如车辆的变道、超车、加减速等行为;
- 动态交通指示设施:如交通信号灯中红绿灯的显示等。
环境要素:深刻影响着车载传感器的感知性能。
- 天气状况:如晴天、雨天、雪天、雾天等;
- 光照条件:如光线强度、能见度、逆光、背光等;
- 温度与湿度:如环境温度、湿度等。
下面表1是外部交通环境要素对自动驾驶功能影响示例。
|
要素类别 |
典型要素 |
影响的功能 |
测试示例 |
|
静态环境 |
道路曲率、坡度 |
LCC过弯舒适性 |
弯道半径≤50m的急弯场景 |
|
车道线清晰度 |
LKA触发概率 |
车道线磨损50%以上的场景 | |
|
动态环境 |
切入车速度 |
ACC响应时间 |
60km/h时速下相邻车辆45°切入 |
|
行人横穿速度 |
ESA激活阈值 |
儿童突然跑入车道场景 | |
|
气象条件 |
降雨强度 |
传感器探测距离 |
大雨环境下毫米波雷达性能衰减 |
|
光照角度 |
摄像头识别准确率 |
黄昏时段低照度场景 |
表1 外部交通环境要素对自动驾驶功能影响示例
2.2 自车任务要素
自车任务要素聚焦于被测车辆(Ego Vehicle)本身的状态和行为目标,是场景中动态可变的核心变量。根据ISO 34501标准定义,自车任务要素主要包括:
- 初始状态参数:包括车辆的初始位置、速度、加速度、航向角等物理状态,以及车辆系统状态(如动力模式、传感器校准状态等)。初始条件直接影响功能激活的边界条件,构成了自动驾驶功能的起点状态;
- 目标行为定义:明确自动驾驶系统在特定场景中需要完成的具体任务,这些目标定义了自动驾驶功能的预期表现;
- 行为约束条件:设定车辆在执行任务过程中必须遵守的规则限制,如遵守交通信号、避让行人、保持安全距离等。行为约束是功能安全验证的重点,是自动驾驶系统决策理论的核心。
对上文所述的场景要素分类进行整理,主要内容如图2思维导图所示。
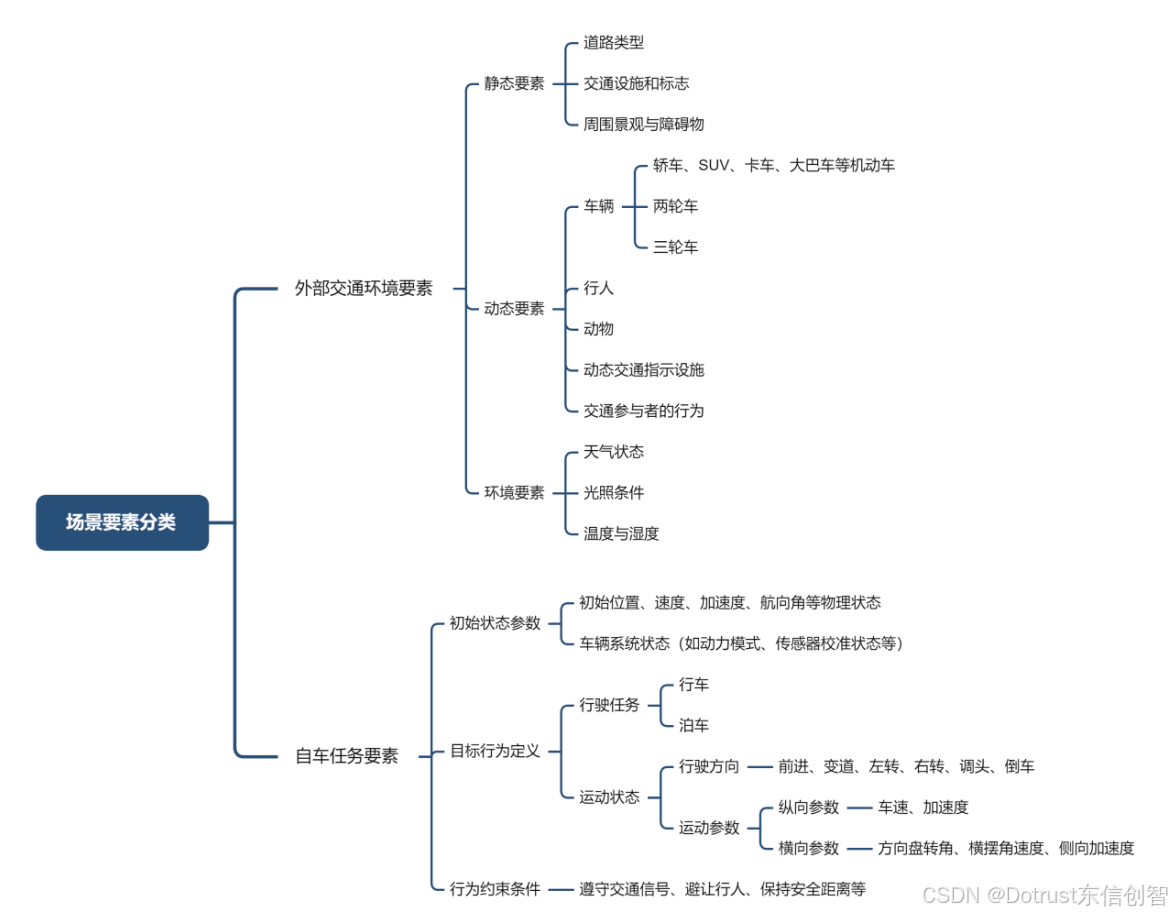
图2 场景要素分类
3.场景要素的评价与反馈验证
自动驾驶仿真场景是多个要素通过动态关联组合而成的复杂系统。测试车辆的行为会影响周围环境要素,而环境要素也会反过来影响测试车辆的行为。验证场景要素的准确性是保障功能安全、提升系统可靠性的核心基石。场景要素的准确性不符合要求时,会导致以下问题,例如:
- 道路摩擦系数影响:仿真中道路边缘摩擦系数建模误差(真实值0.3 vs仿真值0.6),导致实车湿滑路面测试时ESA(紧急转向辅助)避障轨迹偏移1.2米撞向护栏;
- 传感器感知链的误差:激光雷达对低反射率路沿(<10%) 的探测距离从100米衰减至30米,若仿真未建模此特性,在近路沿侧道路行驶时可能误判可行驶区域;
- 导致决策规划发生错误:路口通行场景,停车线位置偏差0.5米,导致L4车辆在无保护左转时与对向车碰撞风险增加3倍。
3.1场景要素评价
没有经过严格计量认证的场景要素,所有仿真结果都只是精美的科幻故事。由以上这些案例证明,在自动驾驶仿真中,场景要素的准确性是至关重要的。因此,需要验证场景要素的真实性评价。真实性评价主要关注测试场景是否能够准确反映现实世界中的交通环境和驾驶条件,具体包括:
- 场景要素信息真实度
评估场景中静态环境要素(如道路类型、交通设施、障碍物等)、动态环境要素(如交通参与者的行为)、交通参与者要素(如机动车、非机动车、行人等),以及气象环境要素(如光照、温度、湿度、天气情况)等是否合理且符合现实世界的数据。
- 场景要素分布真实度
评估场景参数的设置是否符合真实世界中交通行为的统计分布。例如,人工编辑场景时,需参考真实世界场景的参数值范围,以确保生成的场景不会出现现实中不存在的情况。
3.2场景要素验证
在行业中常使用的验证方法就是将仿真的场景要素与之对应的真实的场景要素进行比较,通过对比其关键特征参数来验证仿真场景要素的可信度。例如通过图像采集装置、色度仪和测距仪等,获取真实世界中场景要素关键参数,并与虚拟场景中的场景要素进行对比。如果虚拟场景与真实场景的参数差异小于设定的阈值,则认为虚拟场景的场景要素是准确的。场景要素验证流程如图3所示。
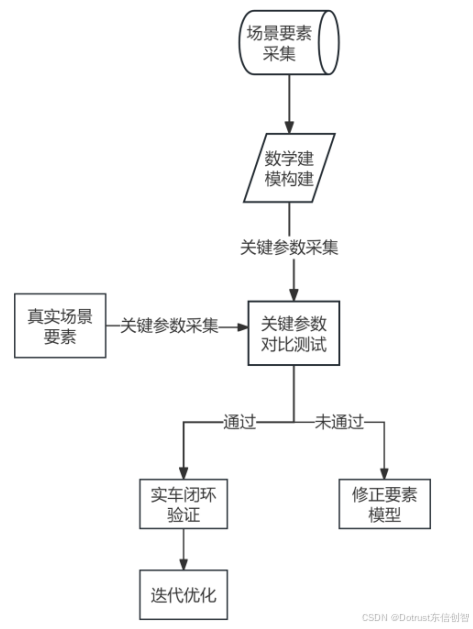
图3 场景要素验证流程图
下面将对仿真场景中的目标物模型要素验证进行详细讲解。
仿真场景中目标物模型可信度验证包括:色度对比测试和关键特征尺寸对比测试。
色度对比测试:首先需要测量模型的实际lab色度值(l:物体的明亮度、a:物体的红绿色度、b:物体的黄蓝色度),采集方法可使用色差仪进行测量。然后对数学构建的三维模型进行采集,导出模型的表面的RGB值,通过算法将RGB值转换为lab色度值。对多个模型的实物与仿真典型特征颜色l、a、b进行采集,计算总色差、均方根误差、最大色度误差。误差值越小说明仿真模型的可信度越高。
关键特征尺寸对比测试:首先对实物模型尺寸进行多次测量取平均值。在对数学构建的仿真模型关键特征尺寸测量。对多个模型的实物与仿真尺寸进行采集,计算均方根误差、最大尺寸误差、加权百分比误差、最大误差百分比。同样对比的误差越小仿真模型的可信度越高。
4.场景要素实例展示
4.1仿真软件介绍
本文以VTD场景仿真软件来做演示,在演示之前先简单介绍下VTD。
VTD(Virtual Test Driver)是一款由德国VIRES公司开发(现隶属于Hexagon集团)的高精度自动驾驶仿真平台,专注于虚拟测试、ADAS/ADS验证、传感器建模和复杂交通场景生成。其核心目标是为汽车行业提供从算法开发到功能安全验证的全流程仿真支持。

图4 VTD软件展示图
使用VTD搭建仿真场景的话,需要两个编辑器。分别是制作静态路网的ROD(Road Designer)和制作动态场景的SE(Scenario Edit)。
ROD是VTD中创建道路网络、交通设施及环境元素的专用模块,负责生成仿真所需的静态基础框架(如车道、路标、地形等),所有道路逻辑数据导出为OpenDRIVE格式(行业标准道路描述格式),确保与动态行为工具(如OpenSCENARIO)无缝集成,支持跨平台复用。
SE是VTD的核心动态场景编辑模块,负责在静态道路环境(由ROD构建)基础上注入交通参与者、行为逻辑与事件触发机制,实现高保真的复杂交通场景仿真。
4.2 场景要素案例展示
下面分别使用VTD官方提供的TraffcDemo场景和自己搭建的AEB场景进行展示。
4.2.1 TrafficDemo场景
在该仿真场景中展示的是一个T字交通路口。如图5所示,由图可以看出,在该路口中包含多种场景要素。下面简单对图片中出现的场景要素进行分类。
静态要素:道路、树木、楼房、加油站牌、椅子和交通信号标识牌等;
动态要素:停在路边的车辆、对话的男女、闯红灯和路边行走的行人、交通信号灯等;
环境要素:天气晴朗、环境干燥;
自车任务要素:被测车辆所在车道是绿灯通行的状态,车辆应准备驶过路口,但因闯红灯行人而停车。

图5 T字路口仿真场景示例
4.2.2 AEB场景
场景描述:城市十字路口场景,以10km/h行驶的左转车辆,与以20km/h行驶的直行电动车即将相撞。首先传感器检测到目标电动车并计算出两车之间的TTC(Time To Collision,碰撞时间)小于1.6s,左转被测车辆开始紧
急制动减速。如图6所示。
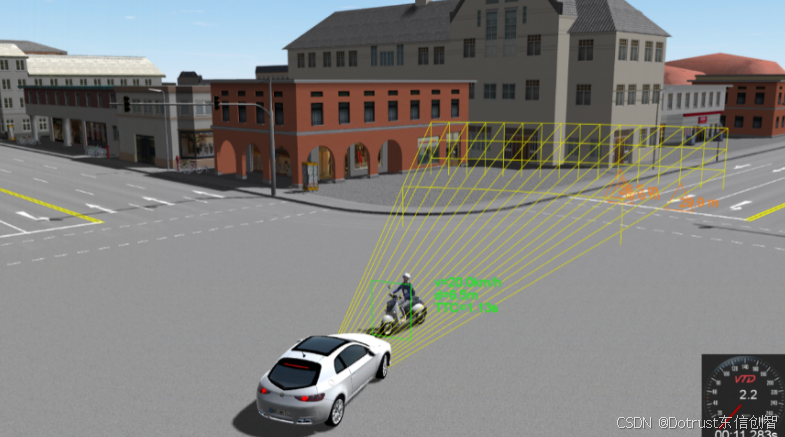
图6 AEB场景
上述两个场景展示的都是在路口处易出现的交通事故场景,如果仿真建模出来的场景要素是不真实准确的,那就会导致测试的结果与测试的预期产生很大的偏差,这也使仿真测试变得没有意义,所以场景要素真实性对于仿真测试是至关重要的。
目前,东信创智已开发出多种多样的场景要素,包含的内容已相对全面,下面简单列举下东信创智已包含的场景要素库内容。
道路要素:各类导向箭头、专有停车位、道路标线、路面裂痕、路面积水积雪、路面铁轨、减速带、各种铺装路面等;
静态目标物要素:锥桶、栅栏、水泥墩、水马、防撞桶、路障锥桶、消防栓、碎石等;
交通信号标识要素:各类交通标识指示牌、施工标识牌、充电标识牌等;
建筑物要素:收费站、赛车场、加油站等;
车辆要素:轿车、SUV、大巴车、卡车、货车、电动车、自行车等。

图7 东信创智开发模型展示
东信创智开发的场景要素都经过专业验证,符合仿真测试要求。下面如图8所示为警示柱在真实场景下相机拍摄、仿真场景下相机拍摄和仿真场景下激光雷达扫描的图片。
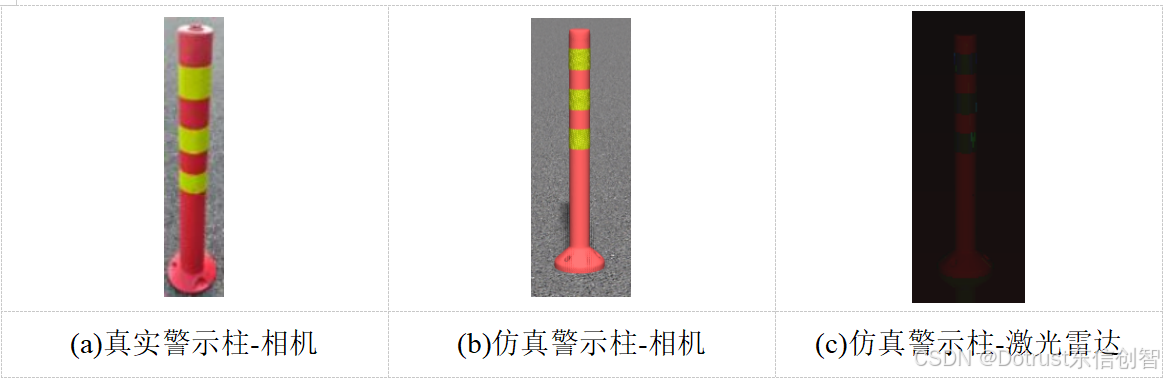
图8 不同场景下警示柱示意图
下面图片展示的是警示柱模型的目标物色度计量测试和关键特征对比测试,分别如图9、10所示。
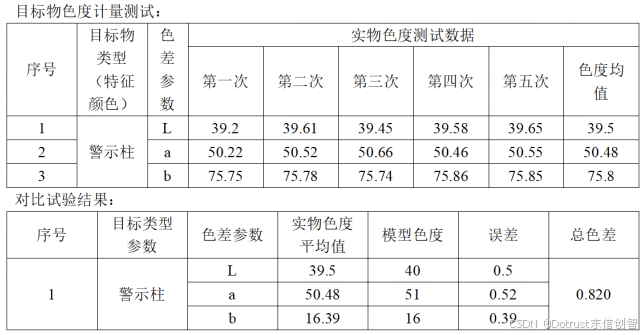
图9 警示柱色度计量测试
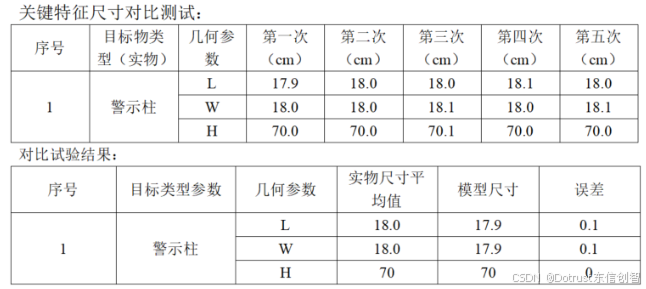
图10 警示柱关键特征尺寸对比测试
5.总结
自动驾驶仿真场景的要素涵盖了测试车辆自身、外部环境、交通参与者、气象条件等多个方面。这些要素通过动态关联和交互作用,构成了一个复杂而真实的测试环境。理解并掌握场景要素的分类与特性,是仿真测试工程师构建高价值虚拟测试环境、精准验证自动驾驶系统能力的基石。 如您有任何问题,欢迎随时发送至沈阳东信创智科技有限公司的市场邮箱market@dotrustech.com。


















 543
543

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









