




一、安装插件
搜索IntelliSense、CodeRunner、Python、C++、CMake、ROS等关键词,安装插件。
二、填写配置文档
在.vscode文件夹中新建如下三个json文档。如果自动生成json文件,则可按照如下内容更改文件。我使用的ROS版本是humble,请按照实际情况进行修改。
c_cpp_properties.json
{
"configurations": [
{
"browse": {
"databaseFilename": "${default}",
"limitSymbolsToIncludedHeaders": false
},
"includePath": [
"/usr/include/**",
"/usr/local/**",
"/usr/local/include/**",
"/opt/ros/humble/include/**",
"${workspaceFolder}/**"
],
"name": "ROS2",
"intelliSenseMode": "gcc-x64",
"compilerPath": "/usr/bin/gcc",
"cStandard": "gnu11",
"cppStandard": "c++17"
}
],
"version": 4
}
settings.json
{
"editor.tabSize": 8,
"editor.rulers": [
100
],
"files.associations": {
"*.repos": "yaml",
"*.world": "xml",
"*.xacro": "xml",
"chrono": "cpp"
},
// Autocomplete from ros python packages
"python.autoComplete.extraPaths": [
"/opt/ros/humble/lib/python3.8/site-packages/"
],
// Environment file lets vscode find python files within workspace
"python.envFile": "${workspaceFolder}/.env",
// Use the system installed version of autopep8
"python.formatting.autopep8Path": "/usr/bin/autopep8",
"python.formatting.autopep8Args": [
"--max-line-length=100"
],
"C_Cpp.default.intelliSenseMode": "gcc-x64",
"C_Cpp.formatting": "Enabled",
"uncrustify.useReplaceOption": true,
"uncrustify.configPath.linux": "/opt/ros/humble/lib/python3.8/site-packages/ament_uncrustify/configuration/ament_code_style.cfg",
"cSpell.words": [
"RTPS",
"athackst",
"autopep",
"cmake",
"cppcheck",
"cpplint",
"deque",
"devcontainer",
"ints",
"noqa",
"pytest",
"rclcpp",
"rclpy",
"repos",
"rosdistro",
"rosidl",
"uncrustify",
"xmllint"
],
"search.exclude": {
"**/node_modules": true,
"**/bower_components": true,
"**/*.code-search": true,
"**/build": true,
"**/install": true,
"**/log": true
},
"python.analysis.extraPaths": [
"/opt/ros/humble/lib/python3.8/site-packages/"
],
"cSpell.allowCompoundWords": true,
"cSpell.ignorePaths": [
"**/package-lock.json",
"**/node_modules/**",
"**/vscode-extension/**",
"**/.git/objects/**",
".vscode",
".vscode-insiders",
".devcontainer/devcontainer.json"
],
"C_Cpp.default.customConfigurationVariables": {
},
"C_Cpp.default.includePath": [
"/usr/include/**",
"/opt/ros/humble/include/**",
"${workspaceFolder}/**"
],
"javascript.preferGoToSourceDefinition": true,
"typescript.preferGoToSourceDefinition": true,
"editor.definitionLinkOpensInPeek": true,
"editor.gotoLocation.alternativeDeclarationCommand": "editor.action.goToImplementation",
"editor.gotoLocation.alternativeImplementationCommand": "editor.action.goToImplementation",
"editor.gotoLocation.alternativeReferenceCommand": "editor.action.goToReferences"
}
tasks.json
{
// See https://go.microsoft.com/fwlink/?LinkId=733558
// for the documentation about the tasks.json format
"version": "2.0.0",
"tasks": [
// Build tasks
{
"label": "colcon make",
"detail": "Build workspace (default)",
"type": "shell",
"command": "source ./src/self_def_msgs/install/setup.bash & colcon build",
"group": {
"kind": "build",
"isDefault": true
},
"problemMatcher": "$gcc"
}
]
}
我建立了自定义消息库self_def_msgs,所以编译代码之前,需要先运行
source ./src/self_def_msgs/install/setup.bash
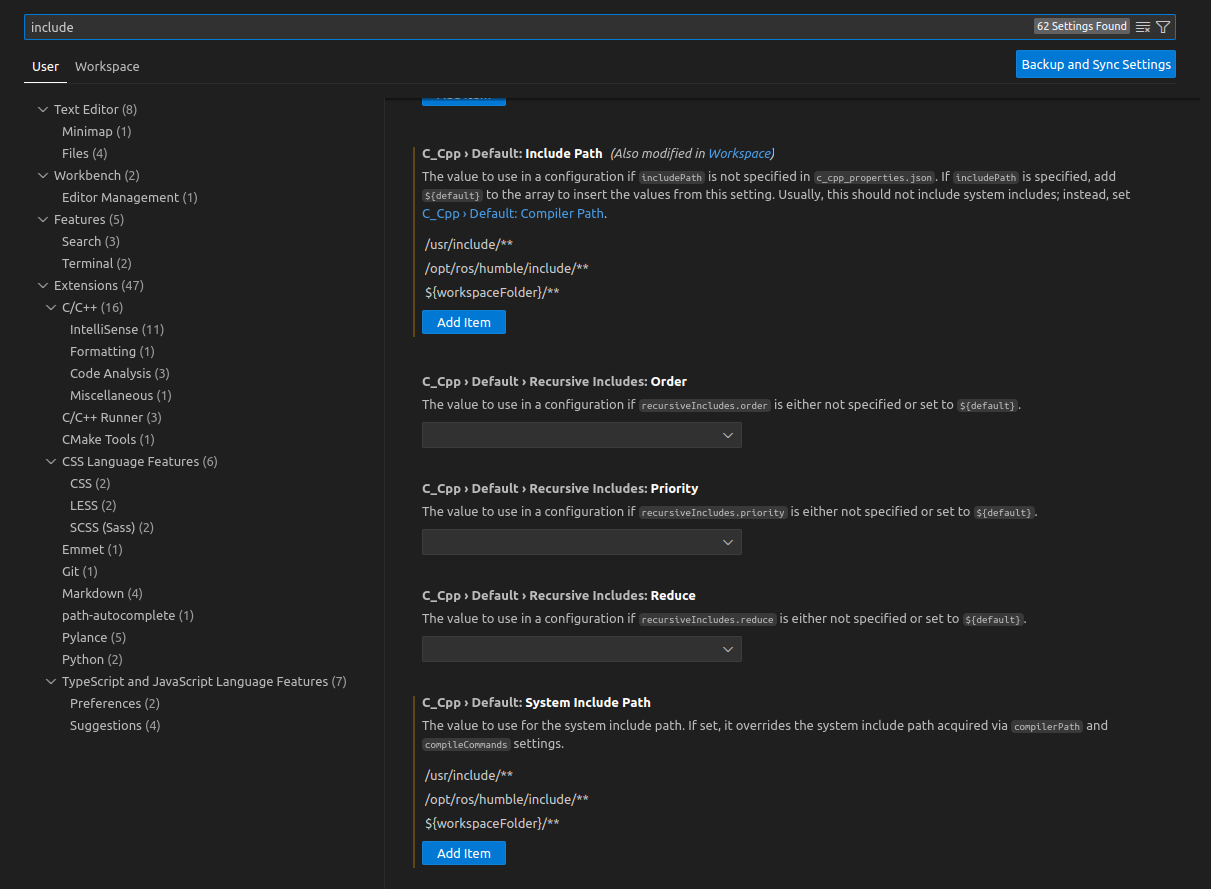
三、配置包含路径
打开File/Preferences/settings工具栏,搜索“include”,配置如下几个路径,也可根据自己的需求更改配置。
/usr/include/**
/usr/local/**
/usr/local/include/**
/opt/ros/humble/include/**
${workspaceFolder}/**
四、配置代码跳转功能
打开File/Preferences/settings工具栏,搜索“go to”,进行相关配置。配置完成后,就可以在代码编辑器中使用右键工具栏中的“Go to Definition”、“Go to Declaration”等代码跳转功能了。
五、编译
同时按下Ctrl、Shift和B键,即可编译。可看到终端显示了如下语句:
Executing task: source ./src/self_def_msgs/install/setup.bash & colcon build
参考文献
[1] https://blog.youkuaiyun.com/orlobl/article/details/107801290
[2] https://mp.weixin.qq.com/s?__biz=MzU1NjEwMTY0Mw==&mid=2247527592&idx=1&sn=1380d457028b3242baee6a5be1fdf93a&chksm=fbc815ccccbf9cda8db34a8c2aa2ce881091dcea3ed49ad91cd24a2600a9b616fd3ba924aa75&scene=27
[3] https://www.bilibili.com/opus/839923800119181337

















 2185
2185

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









