




 本文探讨了DataDistributionService(DDS)如何集成到AUTOSAR自适应平台,以增强汽车行业的通信管理和互操作性。DDS通过提供确定性的实时通信、可配置的数据分发和安全通信,成为AUTOSAR自适应平台中ara::com的有效补充。
本文探讨了DataDistributionService(DDS)如何集成到AUTOSAR自适应平台,以增强汽车行业的通信管理和互操作性。DDS通过提供确定性的实时通信、可配置的数据分发和安全通信,成为AUTOSAR自适应平台中ara::com的有效补充。
在汽车行业中,系统架构都在迅速发展并变得越来越复杂。 为了控制这种复杂性并最大化数据吞吐量,Data Distribution Service™(DDS)已经成为一种更高效,可扩展且安全的解决方案,可满足最苛刻的关键任务部署。
采用DDS的最新组织之一是AUTOSAR。 在此博客中,我们将研究AUTOSAR自适应平台的新DDS网络绑定,它将DDS及其丰富的服务质量(QoS)策略集引入AUTOSAR面向服务的体系结构(SOA),从而实现新的互操作性方案 可以将AUTOSAR系统集成到基于DDS数据总线的大型系统中。
AUTOSAR概述
AUTOSAR(汽车开放系统架构)是汽车制造商,供应商,软件和电子产品供应商的全球合作伙伴。 它为汽车系统制定了可互操作的软件体系结构的标准。
2004年,AUTOSAR推出了其广泛采用的Classic Platform,这是一个分层的软件体系结构,提供了全面的解决方案来处理部署在基于微控制器的电子元件(ECU)中的时间紧迫的应用程序的开发,通信和执行。 经典平台利用著名的连接总线,例如CAN,LIN或Flexray提供强大的通信功能。
在过去的十年中,基于更强大的微处理器和以太网技术的新型ECU的推出为更集成和自治的车辆系统打开了大门。 作为响应,AUTOSAR推出了Adaptive Platform,这是一种全新的软件体系结构,旨在解决全新的功能需求。
AUTOSAR自适应中的通信管理
AUTOSAR自适应平台定义了许多功能集群,范围从执行管理到时间同步,监视,诊断和通信管理。
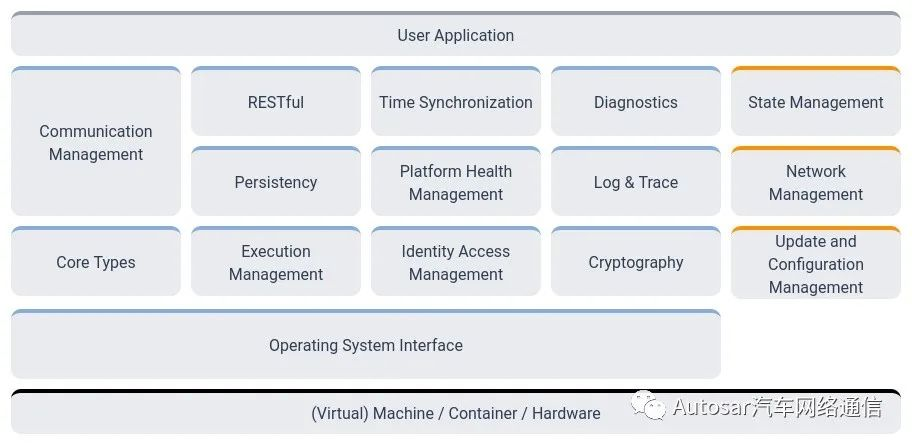
为了进行通信,AUTOSAR Adaptive定义了ara :: com,这是一个基于SOA的标准C ++ API。 ara :: com最初基于SOME / IP,旨在定义一个与基础连接技术无关的API,提供定义和部署已知服务并将功能公开给客户端应用程序的方法,就好像它们是本地资源一样。
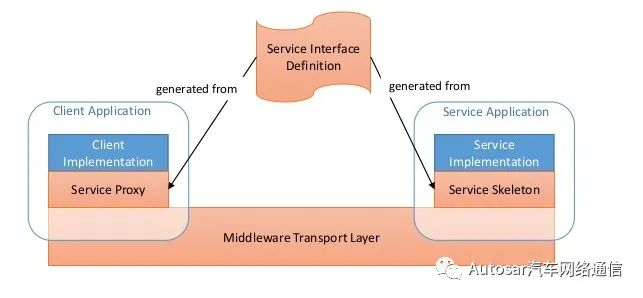
AUTOSAR服务接口通常使用ARXML定义,ARXML是从AUTOSAR UML元模型派生的建模语言。 作为代码生成的结果,ARXML编译器分别为客户端和服务器应用程序生成用于代理和框架的代码。 在客户端,应用程序实例化代理绑定到服务器端运行的服务实例。 每个代理一次只能绑定到一个服务实例,将代理显式耦合到服务实例。
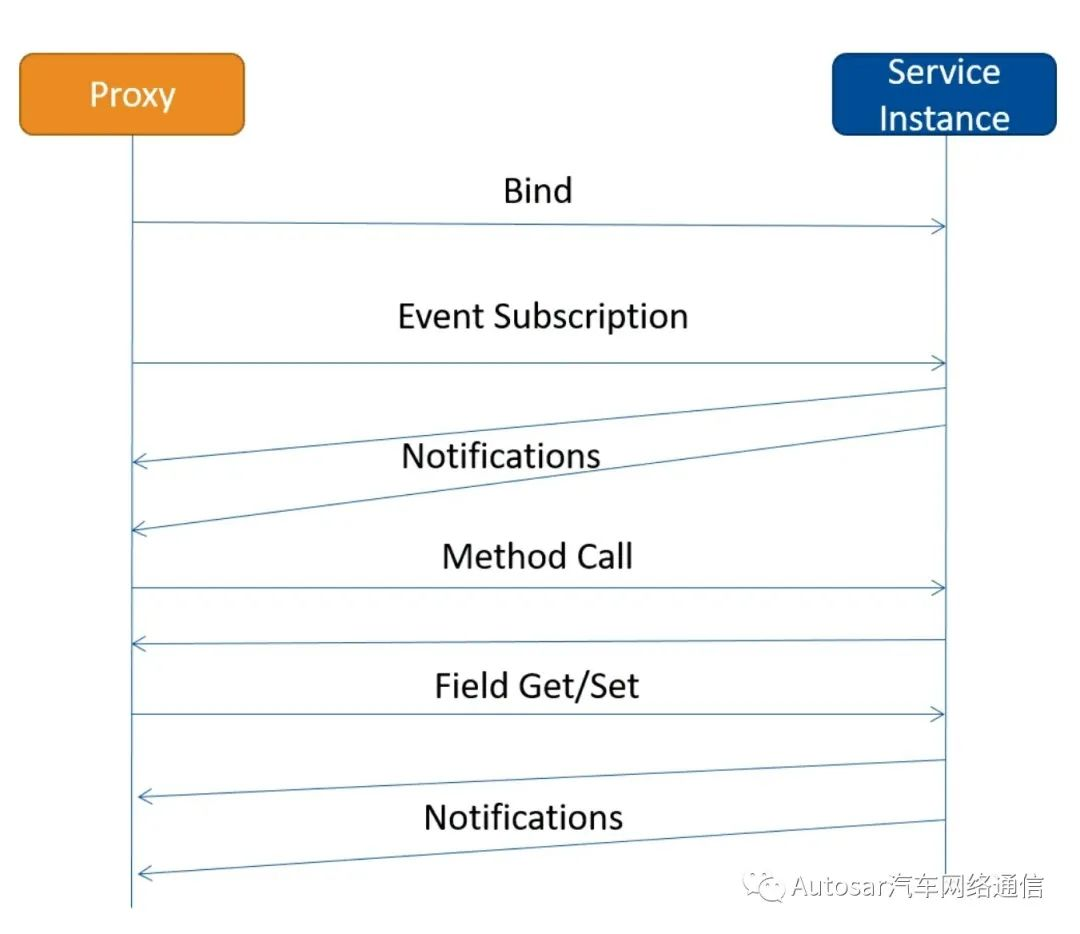
Ara :: com服务提供以下资源:
事件(Events)-通知客户端(Client)应用程序服务器端(Server)触发的事件。
方法(Methods)-公开客户端应用程序可以调用的远程过程。
字段(Fields)-提供客户端应用程序可以使用远程getter和setter修改数据值。 客户还可以订阅字段值更改。
将DDS集成到AUTOSAR自适应平台中
DDS和ara :: com在体系结构级别呈现出明显的差异。 Ara :: com基于纯面向服务的架构,其中客户端(即代理)和服务器(即服务实例)紧密耦合。 DDS引入了以数据为中心的发布-订阅模型,该模型通过提供用于通信的逻辑数据总线来有效地将发布者和订阅者分离。
但是,DDS以数据为中心的发布-订阅模型非常灵活,通常被认为是一种超级模式,可用于实现发布-订阅以及其他模式,例如请求-答复和排队。 因此,DDS可以使用DDS规范系列中已经提供的机制遵守ara :: com和AUTOSAR自适应平台的语义。 下面,我们介绍实现这些概念的基本机制。
耦合服务实例和代理
如上文所述,在实例化时,代理只能绑定到特定的服务实例。 用DDS术语表示,订户应用程序只能从特定发布者应用程序接收数据。 这样的语义要求发布者和订阅者之间的特殊耦合,可以通过诸如分区和内容过滤器之类的机制来实现。
为了限制内容过滤器所需的处理量和资源,DDS网络绑定使用分区将代理与服务实例绑定。 每个ara :: com服务实例都在以服务ID命名的特定分区上发布数据,并且每个代理都使用以其绑定的服务ID命名的分区订阅数据。 可能希望订阅由其他ara :: com服务实例发布的数据的本机DDS应用程序或工具可以订阅特定分区或“ *”分区。
映射事件,方法和字段
为了将事件,方法和字段映射到DDS概念(例如主题和服务), 通过这些机制:
事件映射到常规主题。 这种映射使现有的DDS工具(例如HMI系统)可以通过使用适当的分区简单地订阅代表事件的相应DDS主题来可视化基于DDS的AUTOSAR自适应系统。
方法映射到DDS服务方法。 每个ara :: com服务确实由一个DDS服务组成,该服务公开了客户端应用程序可以调用的所有方法。
字段映射到DDS服务的getter和setter方法遵循与常规方法相同的机制。 字段通知映射到提供当前字段值的常规主题。
可以根据相应的QoS策略配置为处理通信而创建的所有主题和DDS实体。
DDS网络绑定对ara :: com的好处
DDS网络绑定为ara :: com提供了全面的连接解决方。 从这个意义上讲,DDS引入了:
确定性实时通信,使用DDS可靠性协议和其他QoS策略,例如实时性和期限。
使用其丰富的QoS策略集可配置的数据分发。
利用DDS安全性标准及其细粒度的安全性功能进行安全通信。
基于与传输无关的有线协议的可扩展和可插入基础结构,可以有效地部署在共享内存,UDP和TCP的顶部。
最重要的是,DDS网络绑定使AUTOSAR自适应应用程序能够与现有和将来的DDS系统进行互操作。
译文连载
RTPS规范-译文连载:实时发布订阅协议(RTPS)DDS互操作网络协议规范-中文翻译_001
DDS规范-译文连载:DDS (Data Distribution Service) 数据分发服务-规范中文翻译_001
相关链接
【What:什么是DDS? 】【Why:为什么选择DDS? 】
【How:DDS如何工作?】
DDS科普:一文读懂DDS(数据分发服务)
产品介绍:BLUE DCS分布式数据连接解决方案
产品试用:海蓝云平台-Blue DCS
博文汇总:博文汇总(技术博客_行业应用_规范翻译)


















 2350
2350

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









