



近年来,外骨骼机器人正在成为推动人机融合的核心技术之一。无论是在医疗康复、人体辅助,还是在工业增能场景中,外骨骼都以精准的运动辅助能力,帮助用户提升力量、降低疲劳,并为行动受限人群带来更高的生活质量。
在众多方向中,上肢外骨骼因其复杂的肩肘关节结构和三维运动自由度,一直被认为是最具挑战性的研究领域。如何在保证控制精度的同时,使设备保持轻量和高佩戴舒适性,是研究者和工程师不断探索的重点。
今天,我们将带你一起走进德国鲁尔西部应用科技大学(Ruhr West University of Applied Sciences)的一篇研究论文:

1. 核心挑战:轻量化结构与精准运动控制之间的平衡
传统的外骨骼控制多采用基于反馈的控制策略,如使用 PID 控制器搭配外置扭矩或力传感器,通过实时误差反馈实现动作矫正。虽然有效,但问题也十分明显:
- 增加结构重量
- 提高系统复杂度
- 布线与供电要求变高
- 动态运动中可能出现延迟或抖动
为解决这些问题,论文团队提出了一套 基于前馈控制(Feedforward Control)的主动重力补偿系统。它最大的特点是完全依赖电机内部的位置传感器,不需要额外的外置传感器。控制系统通过解析动力学模型预测所需补偿力矩,提前生成控制指令,从而让外骨骼以最小硬件负担实现高精度的重力补偿。
2. 前馈控制的优势
与依赖“误差→反馈→修正”的传统方法不同,前馈控制具有先天优势:
- 响应更快:提前计算力矩,几乎无延迟
- 运动更平滑:无明显反馈振荡
- 系统更轻量:无需外置扭矩/力传感器
- 结构更简单,功耗更低
测试结果表明,该系统在几乎无摩擦条件下依旧能保持稳定姿态,并能在不同动作切换中保持高可靠性。对于康复和工业辅助应用,这意味着:用户肌肉负担显著减轻,动作安全性提高,机器人与人体之间更加自然、协调。
3. 高性能电机:外骨骼动力的核心
在可穿戴机器人中,电机性能决定了设备能否真正做到“轻量、高力矩和高响应”。本研究中,每侧手臂都搭载了 CubeMars 高功率密度无刷动力模组,具体包括:
AK60-6 模组电机AK60-6 V1.1 KV80 机器人动力模组丨执行器 - 峰值扭矩9Nm
- 24V 额定电压
- 峰值扭矩 9 N·m
- 重量仅 380 g
- 自带驱动,结构极简
该型号部署在每侧三个关节,用于肩部部分 DOF 与肘部关节,其轻量和高响应特性特别适合长时间佩戴的外骨骼设备。
AK80-9 高扭矩动力模组AK80-9 KV100 机器人动力模组丨执行器 - 额定扭矩9Nm,48V,485g
- 48V 额定电压
- 峰值扭矩 18 N·m
用于肩部主承重关节(Joint 2),承担上臂抬升与外展等重力最大的动作需求。
CubeMars 电机为何适合前馈控制 + 可穿戴机器人?
- 高扭矩密度,使外骨骼整体更轻
- 低摩擦、低噪声,力矩输出更线性
- 编码器精度高,使动力学预测更可靠
- 带驱动电机减少外部模块,关节更紧凑
与前馈控制相结合,CubeMars 电机可在极短时间内响应力矩需求,确保每个姿态都能做到“悬停不坠”。
4. 系统架构与工程实现
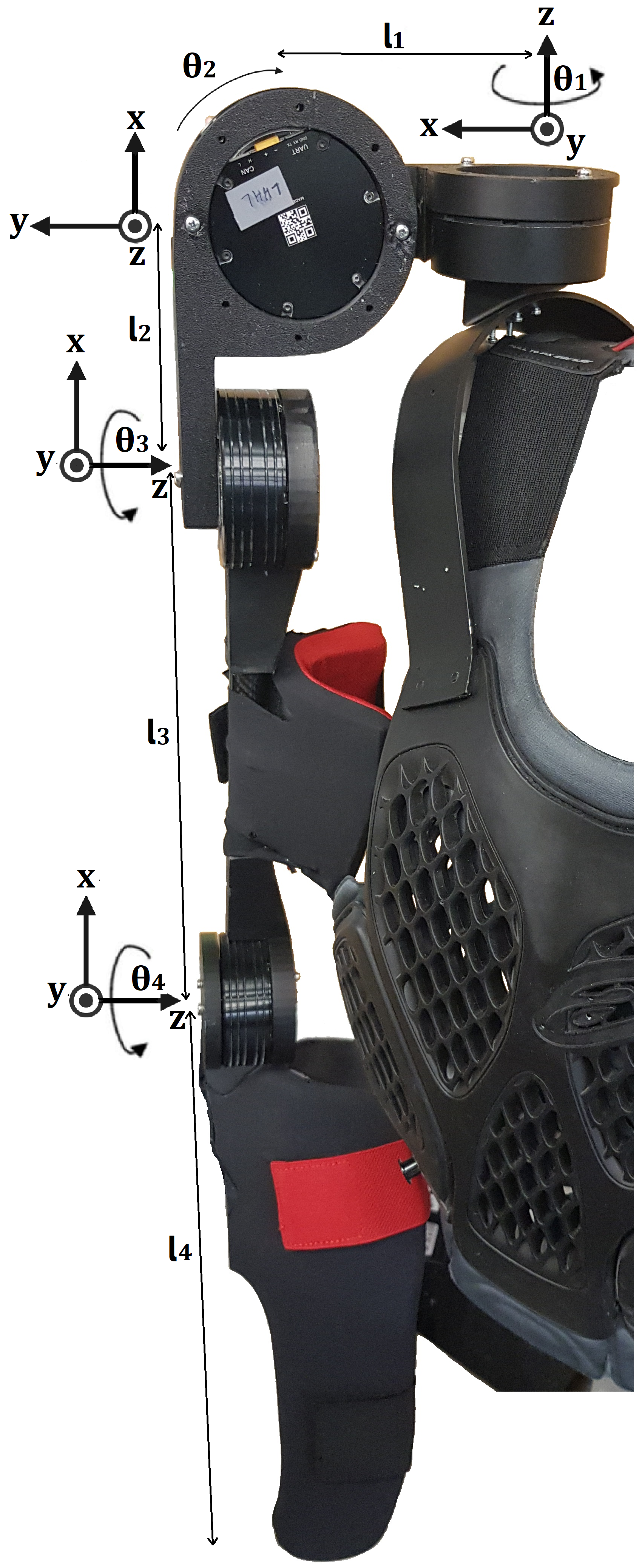
该外骨骼采用 4 自由度设计,能够在三维空间内模拟自然的肩肘运动轨迹。系统架构包括:
- 控制器:ATmega328P(Arduino Uno)
- 通信:CAN 总线
- 动力:TATTU 22.2V、222Wh 智能锂电池
- 总重量:约 8 kg(含电池)
- 结构材料:轻量碳纤维
整体设计强调 可穿戴性、轻量化与实用性,适合长时间辅助或康复训练。
5. 实验验证与未来应用前景
实验结果显示:
- 在多种姿态下,外骨骼能稳定保持位置无明显漂移
- 动态切换时响应迅速、无延迟
- 所有关节在前馈控制下实现真实意义的主动重力补偿
这些成果证明:
前馈控制 + CubeMars 动力模组是构建轻量可穿戴外骨骼的一种高效、可靠的方案。
未来应用方向包括:
- 上肢康复机器人
- 工业辅助外骨骼
- 协作机械臂
- 人体增强与辅助设备
随着可穿戴机器人加速走向实际应用场景,CubeMars 将继续通过高功率密度动力模组,支持更轻、更强、更自然的人机融合系统落地。


















 844
844

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









