




 该文描述了通过激光跟踪仪验证6R机器人示教器旋转角度的准确性,以及计算减速比和获取机器人几何参数的步骤。包括使用示教器控制机器人旋转,记录编码器值变化来求解减速比,以及通过单轴旋转和点的拟合来确定机器人的几何结构。
该文描述了通过激光跟踪仪验证6R机器人示教器旋转角度的准确性,以及计算减速比和获取机器人几何参数的步骤。包括使用示教器控制机器人旋转,记录编码器值变化来求解减速比,以及通过单轴旋转和点的拟合来确定机器人的几何结构。
【个人理解,有错请指出,谢谢】
实验设备:激光跟踪仪、6R机器人、示教器、笔记本(上位机)
一、验证示教器旋转角度的正确性
思路:每个轴单独进行计算
1、激光跟踪仪进行调水平校准,并且将激光球放置在机器人末端,完成上位机与激光跟踪仪的连接。
2、以MDH建模的基准坐标系为基准,建立机器人基准坐标系。
3、示教器控制机器人旋转,每次偏移10°(小于90°),通过激光跟踪仪记录末端每次的位置信息(最少6组数据)
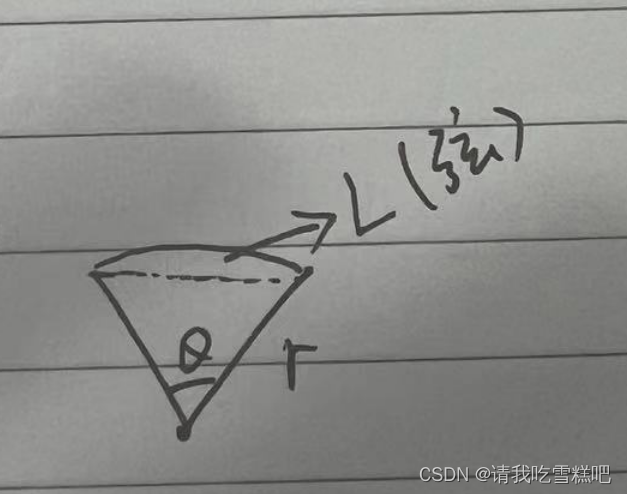
4、通过激光跟踪仪测量的6个点进行圆拟合操作,获取拟合圆的半径r
5、通过拟合圆半径r 和变化角度θ求取弦长。另一边通过激光跟踪仪获取两点之间的直线距离。
6、通过步骤5获取的两组数据进行对比,可以有确定示教器旋转角度的正确性。
#注意:
为什么要小于90°:因为0°~90°,求取圆弧弦长是单调递增函数,大于90°就会出现递减的情况
怎么选取角度变化量:在激光跟踪可以检测的范围内进行均分,数据点越多越好,覆盖的范围越大越好。
二、求减速比
思路:示教器读电机的编码器值变化,读硬件的值认为一定是正确的。
我的机器人使用的是禾川电机。公式为:jsb = bmq / 2^17 / joint * 360
jsb:减速比
bmq:编码器数值变化量
joint:角度变化量(度数)
2^17:编码器位数为17位
1、示教器控制机器人旋转10°,记录编码器的初始值和变化后的值,记录至少11组。
2、通过matlab计算减速比的值,计算这10组的减速比的平均值,并且计算这10组的误差
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1642
1642




 到【灌水乐园】发言
到【灌水乐园】发言







