







一、MultiCol-SLAM简介
Paper:https://arxiv.org/abs/1610.07336
Code:https://github.com/urbste/MultiCol-SLAM
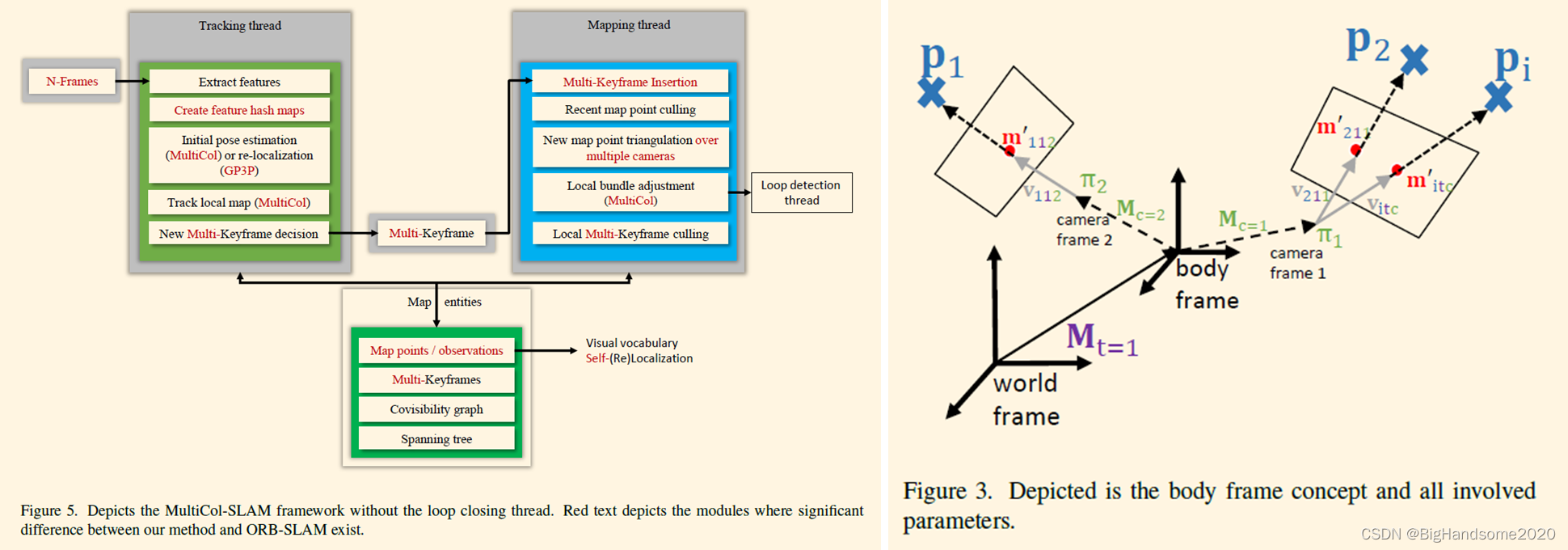
MultiCol-SLAM基于ORB-SLAM和ORB-SLAM2进行开发,扩展为使用多鱼眼摄像头的SLAM系统,采用通用摄像机模型将任意中央摄像机耦合到多摄像机系统中,主要贡献如下:
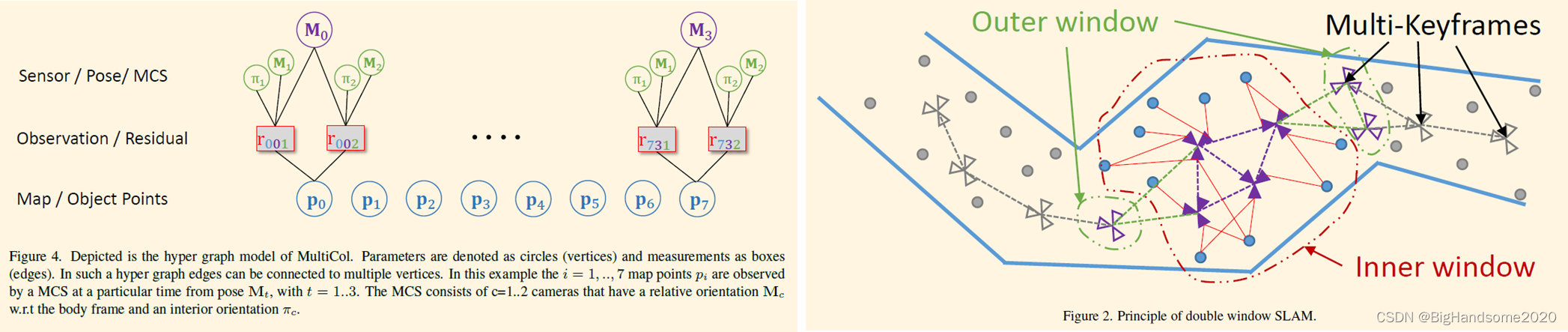
1、引入多关键帧(MKFs)。
2、MultiCol的hyper-graph公式。
3、多摄像头闭环。
4、用于重定位的最小非中心绝对姿态估计方法。
5、基于基本矩阵的不同初始化方法。
6、一些性能改进。
二、 MultiCol-SLAM效果展示
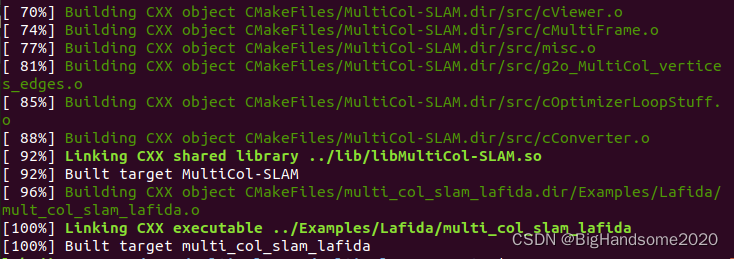
1、编译./build.sh成功
2、测试官方代码中给的dataset
(1)MultiCol-SLAM官方代码中给的数据集地址:dataset
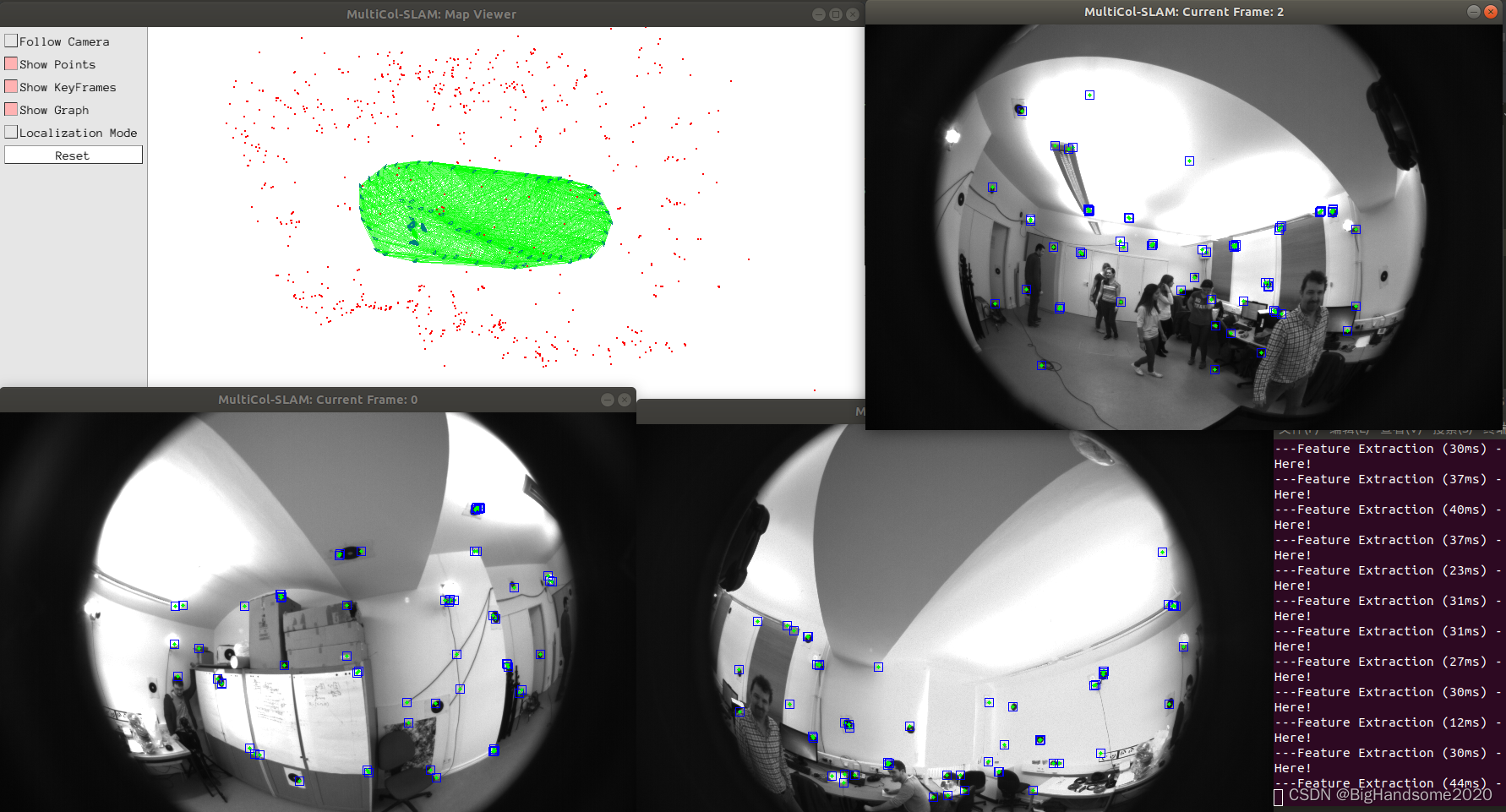
(2)运行代码:可执行的multi_col_slam_lafida需要4条路径。第一个是词汇表文件的路径。第二个是设置文件的路径。第三个是校准文件的路径。第四是图像的路径。
./Examples/Lafida/multi_col_slam_lafida ./Examples/small_orb_omni_voc_9_6.yml ./Examples/Lafida/Slam_Settings_indoor1.yaml ./Examples/Lafida/$YOUR_DATASET_PATH$/IndoorDynamic
(3)效果展示
参数含义可参照:https://blog.youkuaiyun.com/ouyangandy/article/details/106466412


















 1729
1729

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









