






 本文深入探讨了智能驾驶系统的平台架构,包括云服务平台、软件平台、硬件平台和车辆平台的关键组件。详细介绍了Docker容器技术在平台部署中的应用,以及高精度地图(HDmap)在导航中的作用。同时,文章还涵盖了工具链、数据记录和模拟测试等方面的内容。
本文深入探讨了智能驾驶系统的平台架构,包括云服务平台、软件平台、硬件平台和车辆平台的关键组件。详细介绍了Docker容器技术在平台部署中的应用,以及高精度地图(HDmap)在导航中的作用。同时,文章还涵盖了工具链、数据记录和模拟测试等方面的内容。
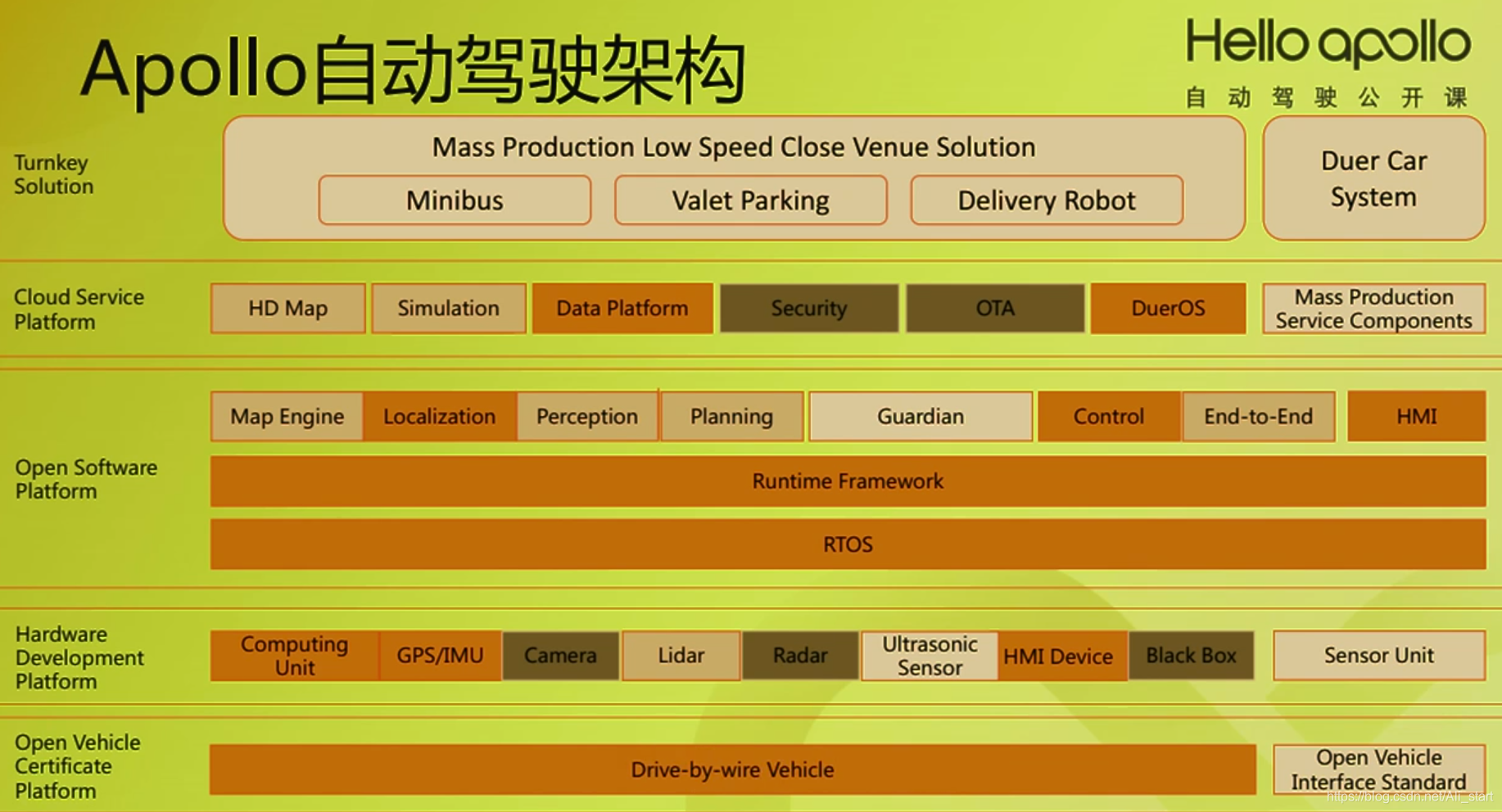
平台架构
云服务平台: HD地图 仿真 数据平台 安全 云更新 指令控制
软件平台 : 地图工程 定位 感知 (预测) 规划 安全 控制 自主规划 人机交互
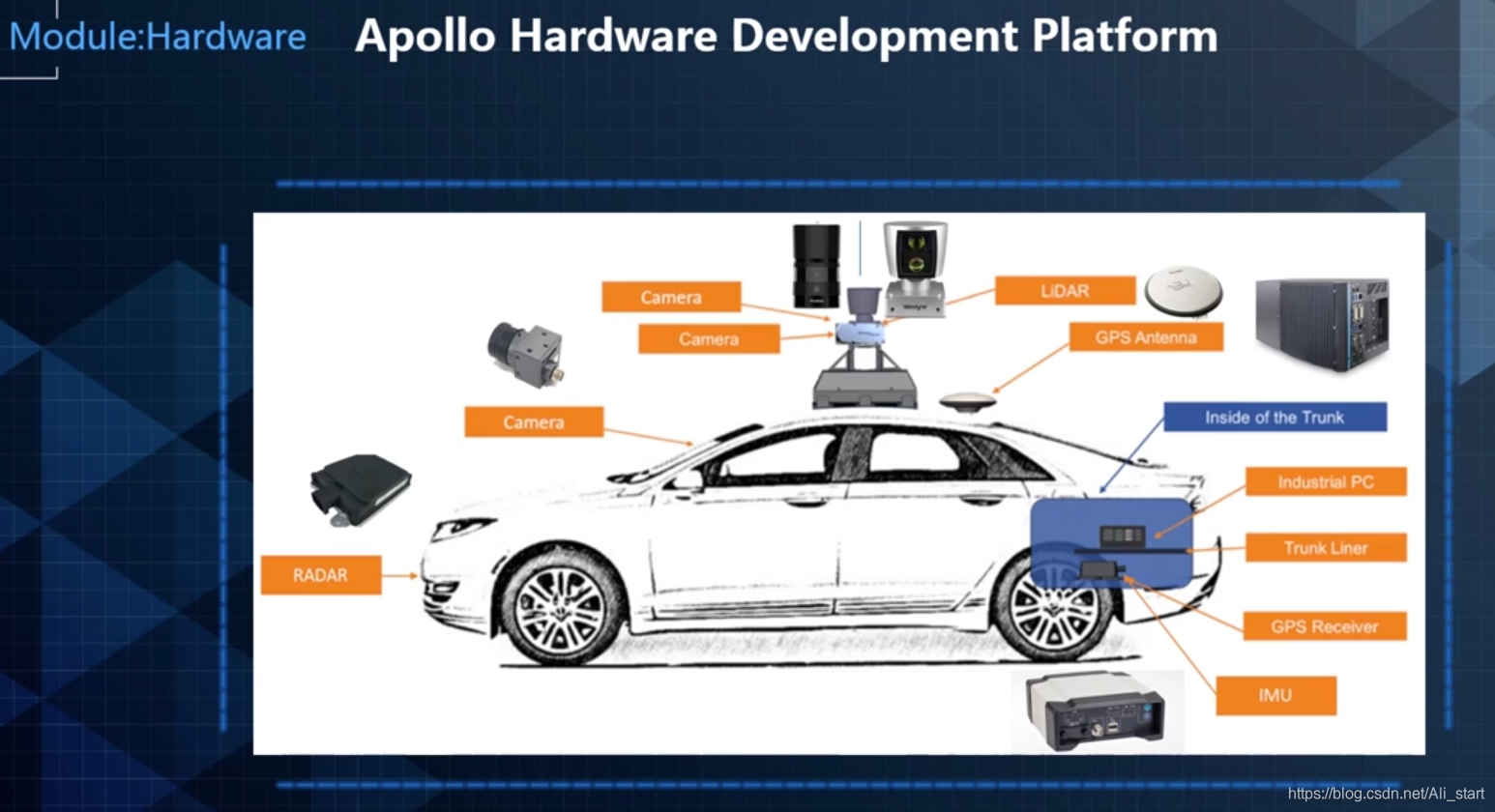
硬件平台 : 计算单元 GPS 相机 激光雷达 毫米波雷达 超声波雷达 指令设备(平板) 黑盒(数据记录)
车辆平台 : 线控车辆
平台主要issue
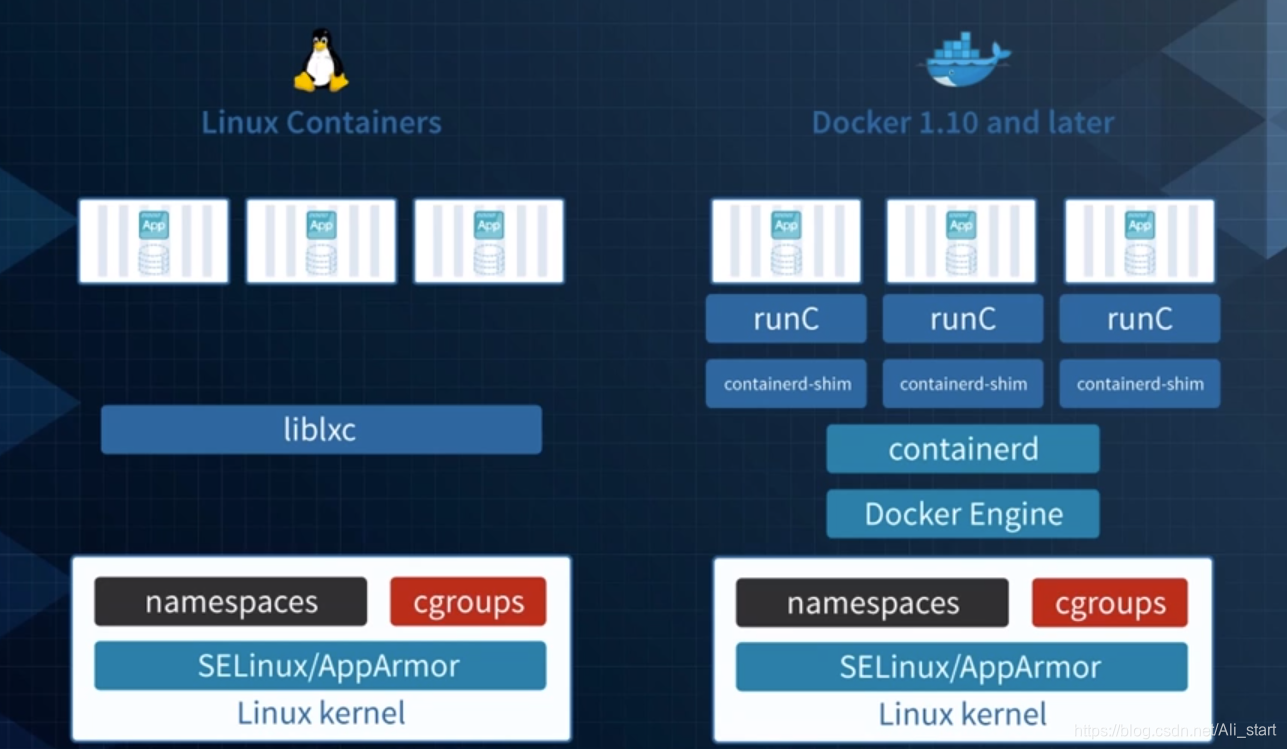
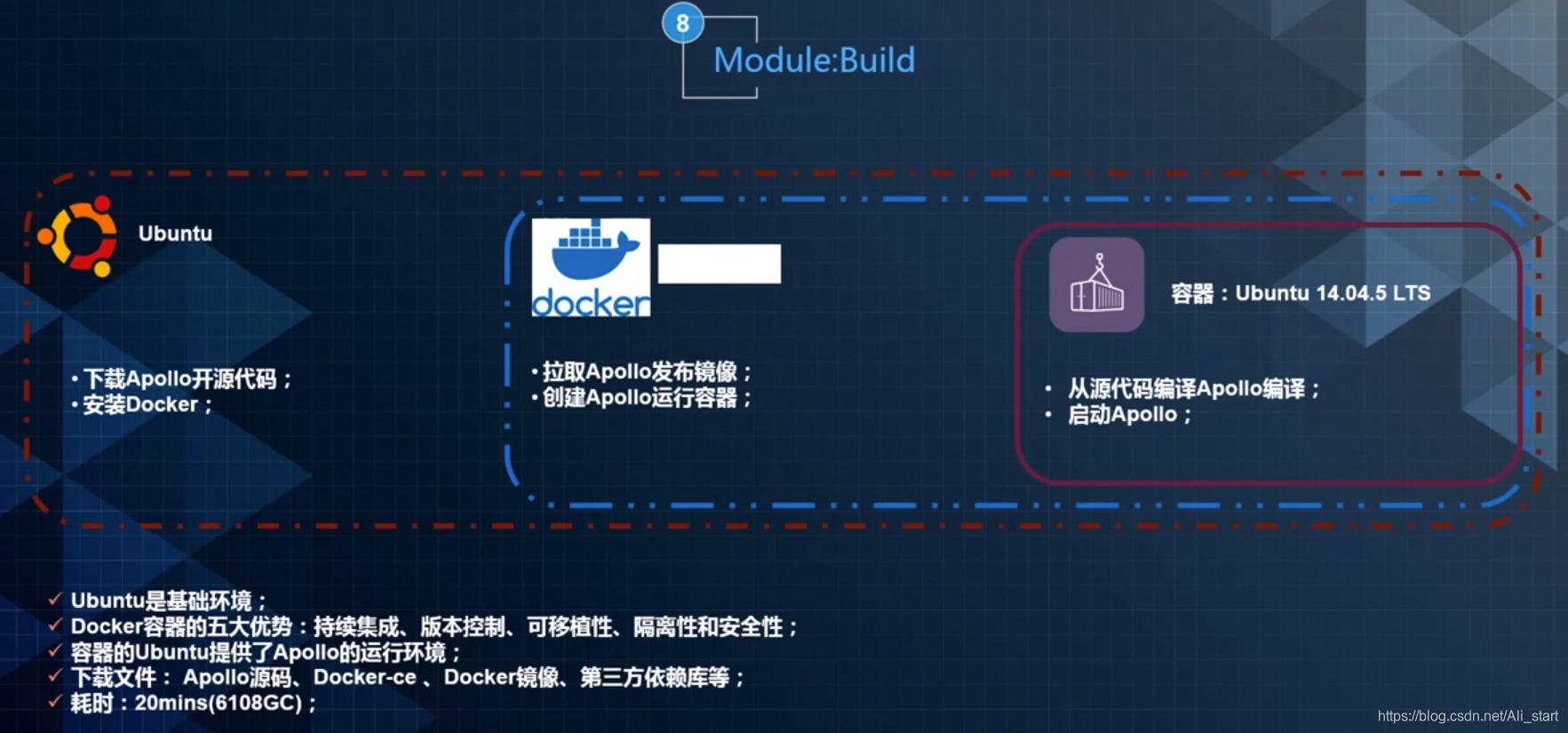
Docker容器技术
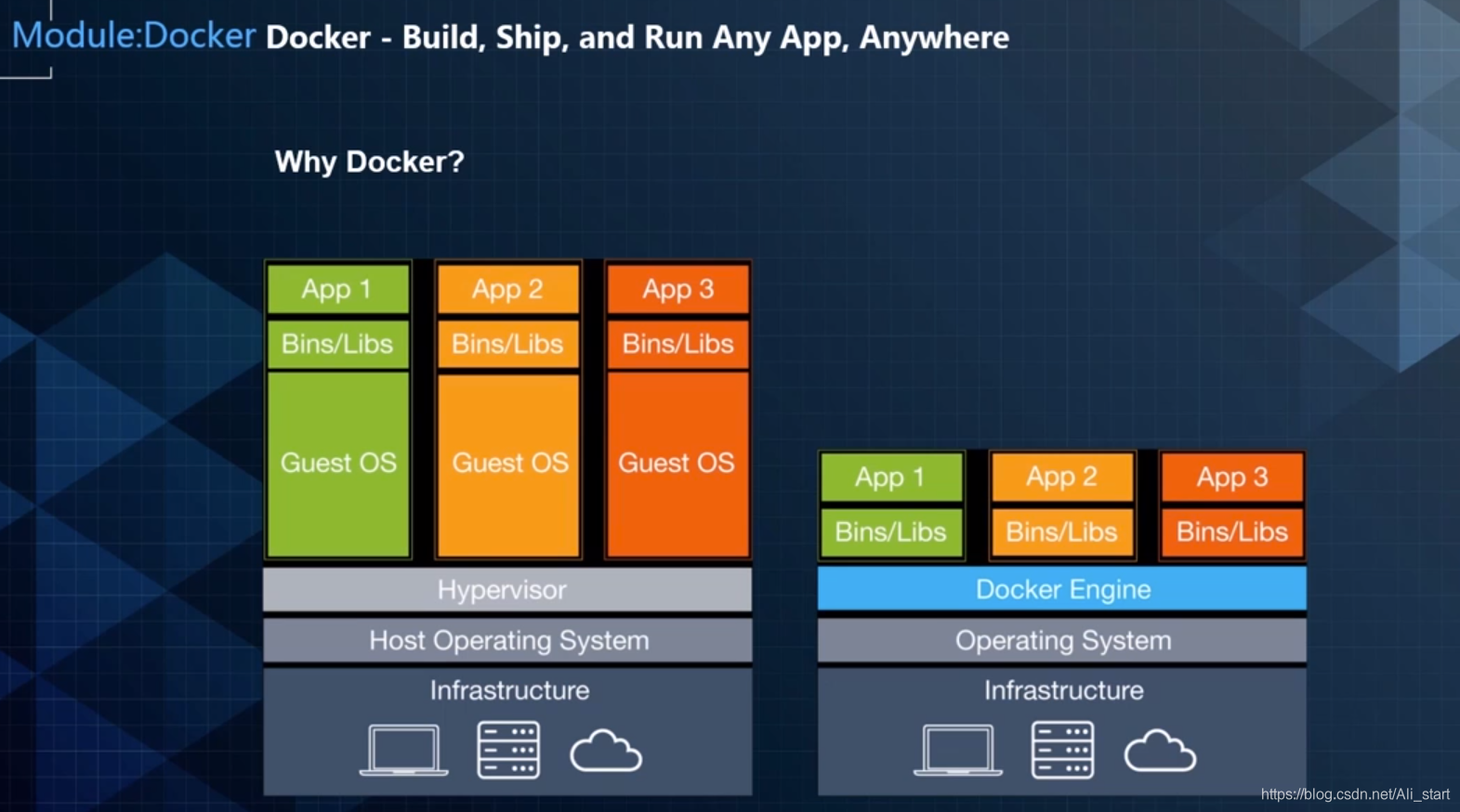
Docker是配置好的一套文件,安装较为方便,好部署
硬件
可以及拿及用,也可以适配自己的方案(重新采集编译,数据发布等)
Build
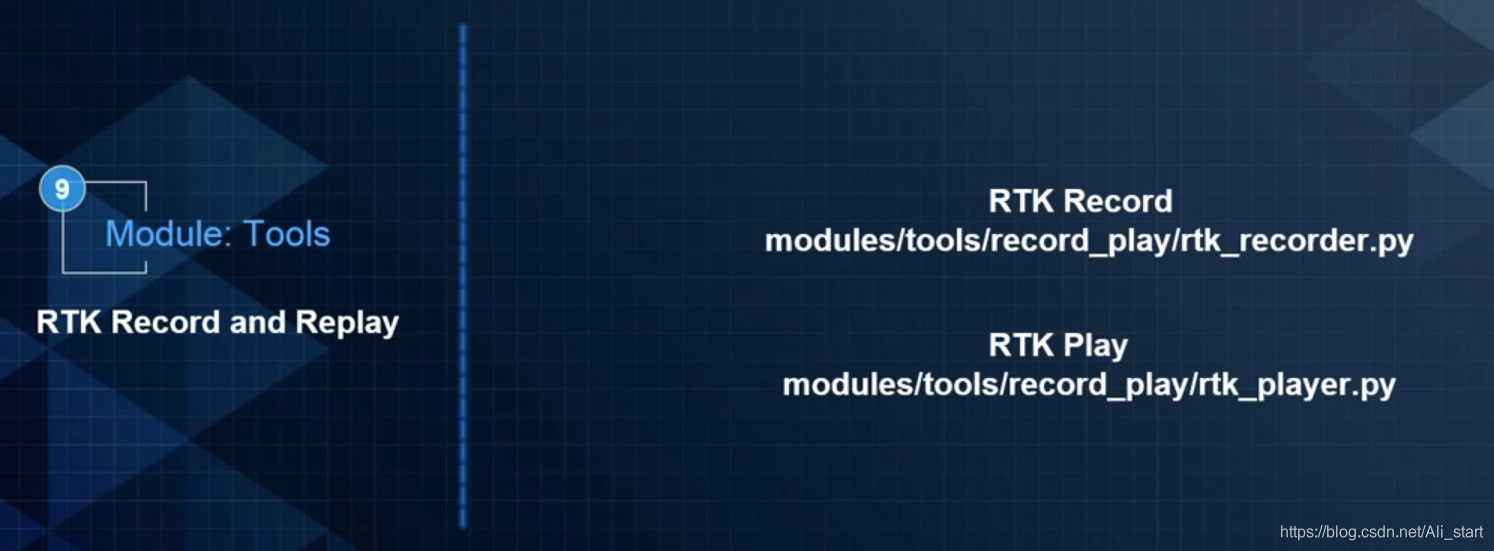
循迹测试
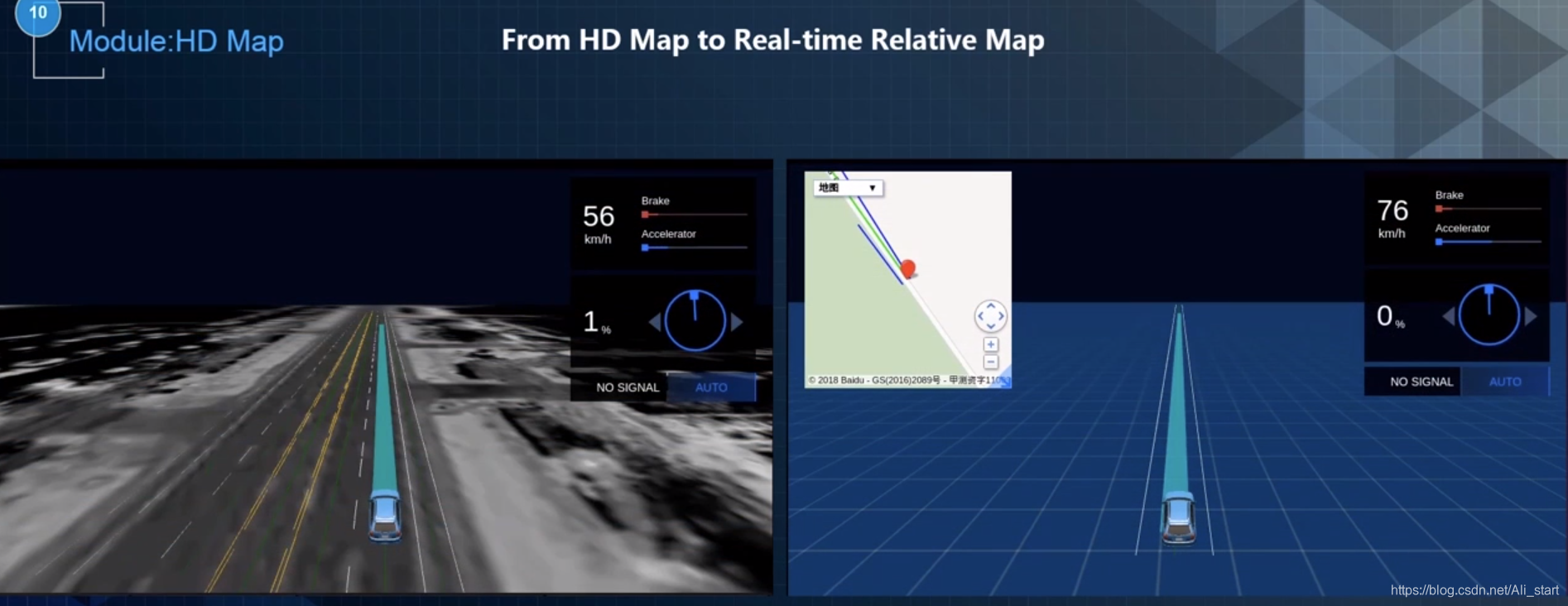
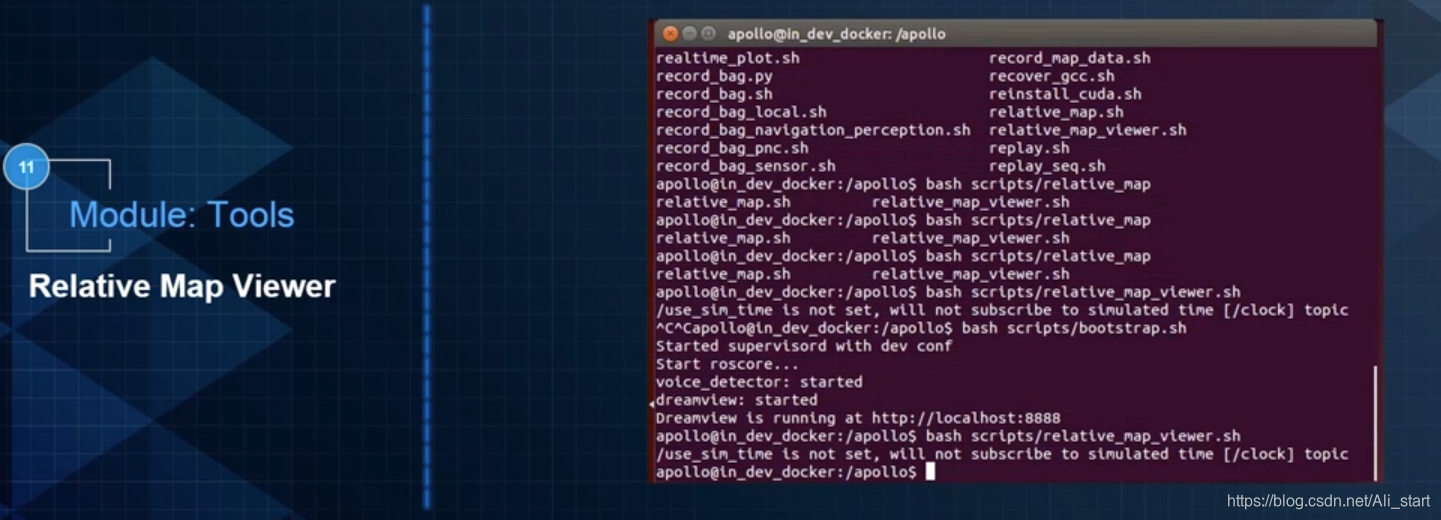
HD map
左侧是一个高精度地图,右侧是一个实时的相对地图
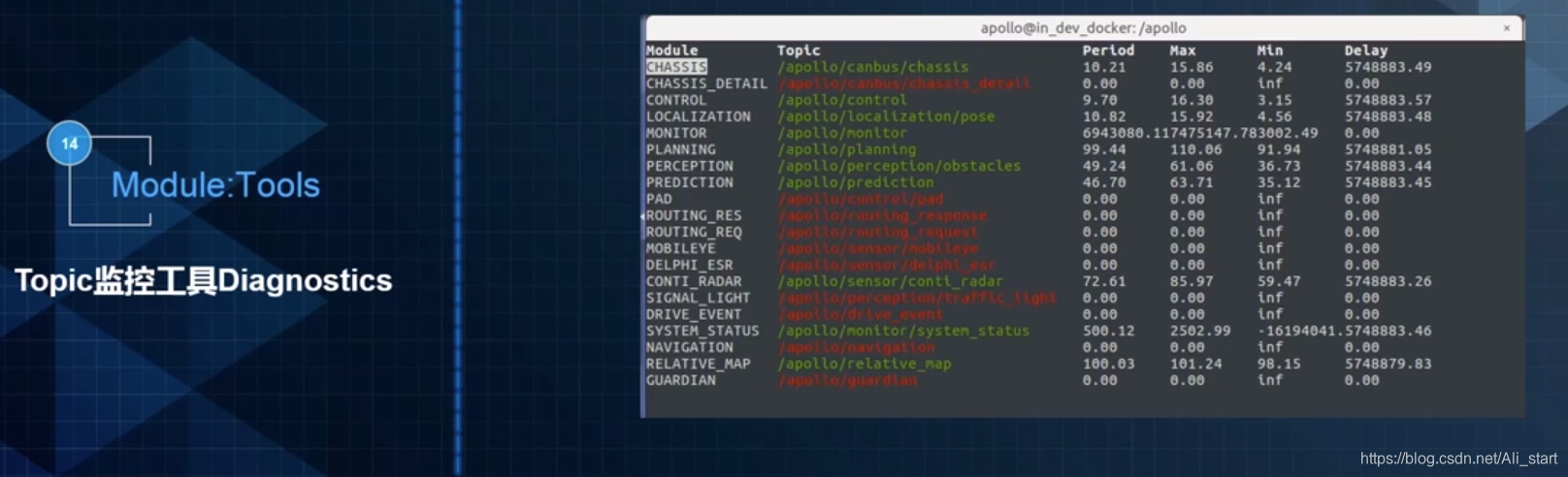
工具链
相关数据查看
监听工具
数据记录rosbag
数据被序列化的切分
- 资料规划
- 开车事件
- 统计里程
- pnc示例主题
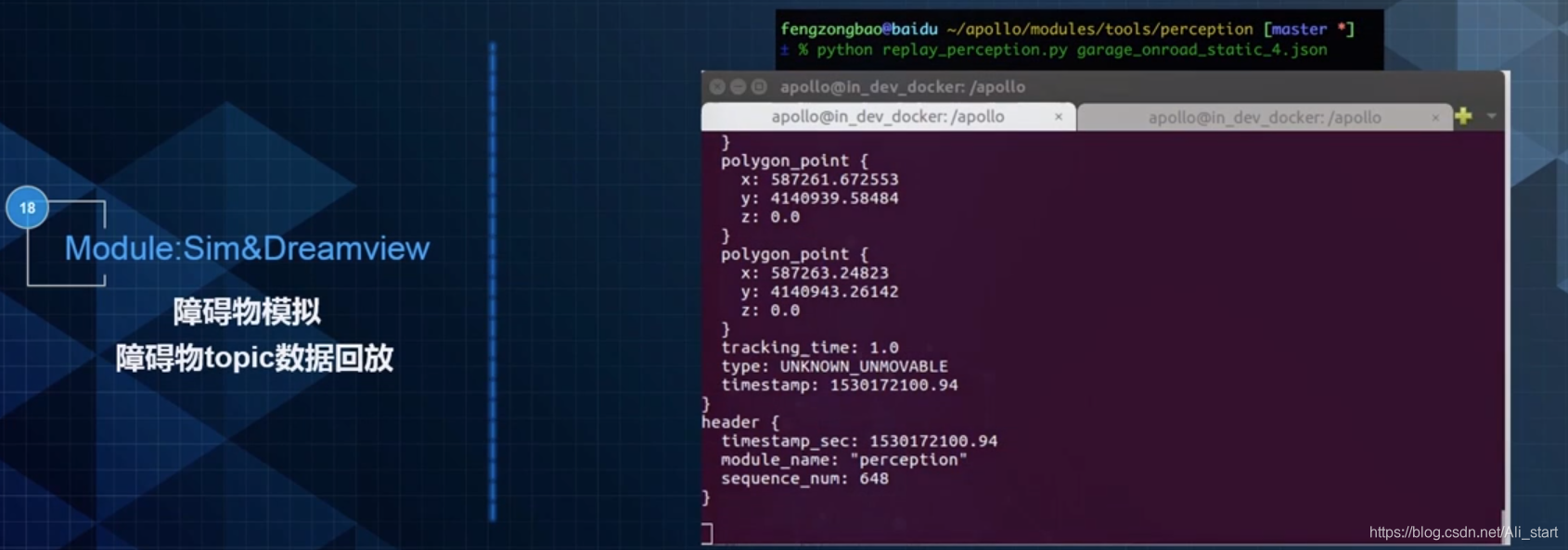
交通灯模拟

障碍物模拟

















 767
767

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









