




在深度强化学习的世界里,许多初学者会被一上来的一堆概念搞懵:Q-learning、策略梯度、Actor-Critic、A3C、PPO……仿佛每一个都很重要,但似乎每一个都很难。
但如果你想真正理解现代强化学习的核心思想,Actor-Critic 是一条必须走通的主线:
-
理解 Actor(演员)= 理解策略方法(Policy-based)
-
理解 Critic(评论家)= 理解价值方法(Value-based)
-
理解 Actor-Critic = 理解为什么许多最强的 RL 算法(A3C、PPO、SAC)都围绕这套框架展开
这篇文章的目标是:用生活化类比解释核心概念,用直觉讲明白原理,用一篇文章让你几乎打通 Actor-Critic 的基础和深层思维。
无复杂公式,少术语堆砌,但深刻。
一、了解 Actor-Critic
强化学习有两大类方法:
-
价值方法(Value-based):如 Q-learning、DQN
只计算某个状态或动作的“好坏分数” -
策略方法(Policy-based):如 REINFORCE
直接学习如何做动作(策略 π),但学习波动大
它们各有优缺点,谁也不能独当一面。
Actor-Critic 的出现,就是为了结合两者的优势——既学会“该怎么做”,又学会“这一步到底好不好”。
通俗地说:
价值方法是“评分系统”,策略方法是“行为系统”。
Actor-Critic 是“行为系统 + 评分系统 = 高效、稳定的学习”。
1. 盲目的演员 (Policy-Based)
基于策略的方法(Policy-Based, PG)的核心思想很简单:好的奖励,就多做;坏的奖励,就少做。
以 REINFORCE 算法为例,它的更新逻辑是:
-
演员 (Actor) 在一个“回合”(Episode)中表演完一整套动作。
-
最后,它拿到了一个总奖励
(比如游戏得分100分)。
-
它回头看:“哇,我得了100分!看来我这一整套动作都挺不错的,我要增加做这些动作的概率。”
问题出在哪里?
这个问题就是“高方差 (High Variance)”。
-
奖励的“归功”不明确: 假设你在游戏中做了100个动作,最后赢了。你真的知道是哪几个动作导致了胜利吗?REINFORCE 算法粗暴地认为“所有动作都有功劳”,这显然不公平。也许第10个动作是神来之笔,而第50个动作其实很糟糕,只是被“平均”掉了。
-
奖励信号极其稀疏: 演员必须演完“一整出戏”才能得到一次“掌声”(奖励)。如果这出戏很长(比如一盘围棋),它可能要等几百步才知道自己做得好不好。在这之前,它完全是“盲目”的。
-
极其依赖采样: 你的“演员”这次运气好,碰巧赢了,它就强化了这套动作。下次运气不好,输了,它又去否定这套动作。策略的更新会非常不稳定,来回摇摆。
困境小结: “演员” (Policy-Based) 知道如何做动作,但它不知道“好坏的标准”,只能等最后的结果,导致学习效率低下且不稳定。
2. 只会计算的评论家 (Value-Based)
基于价值的方法(Value-Based)如 Q-Learning 或 DQN,则完全是另一个思路。
它不直接学习“该做什么动作” (策略 ),它学习一个“评论家” (Critic),这个评论家专门给“在某个状态 s下,做某个动作 a” 这件事打分,这个分数叫 Q(s, a)。
它的核心思想是:我不需要知道策略是什么,我只要知道所有“状态-动作对”的价值,那我自然就知道最好的策略 —— 选 Q 值最高的那个动作就行了。
问题又出在哪里?
-
无法处理“连续动作”: 这是它最大的硬伤。DQN 的核心是“在所有可能的动作中,选一个Q值最大的”。如果动作是连续的(比如自动驾驶的方向盘转角、机器人的手臂力度),你根本无法“遍历所有动作”。
-
策略的“确定性”: DQN 选出来的策略是“确定性”的(Greedy)。在某个状态,它永远只会选那个最好的动作。但在很多现实场景中(比如石头剪刀布),“确定性”的策略是致命的,你一定需要“随机性”的策略。
困境小结: “评论家” (Value-Based) 擅长评估价值,但它“不会演戏”。它无法输出策略,也处理不了连续的动作空间。
3. Actor-Critic 的诞生
现在,我们把两个“和尚”的困境放在一起:
-
演员 (Actor): 会演戏(输出策略
),能处理连续动作,但需要一个“即时”的指导,而不是等到“剧终”才给个总分。
-
评论家 (Critic): 会打分(评估价值
或
),能提供“即时”的反馈,但它自己不会演戏。
答案呼之欲出。
为什么我们不让“评论家”来指导“演员”呢?
这就是 Actor-Critic (AC) 算法的精髓:
-
我们同时训练两个网络。
-
演员 (Actor):一个策略网络,负责输出动作(或动作的概率)。
-
评论家 (Critic):一个价值网络,负责评估状态(比如 V(s),即“当前状态有多好”)。
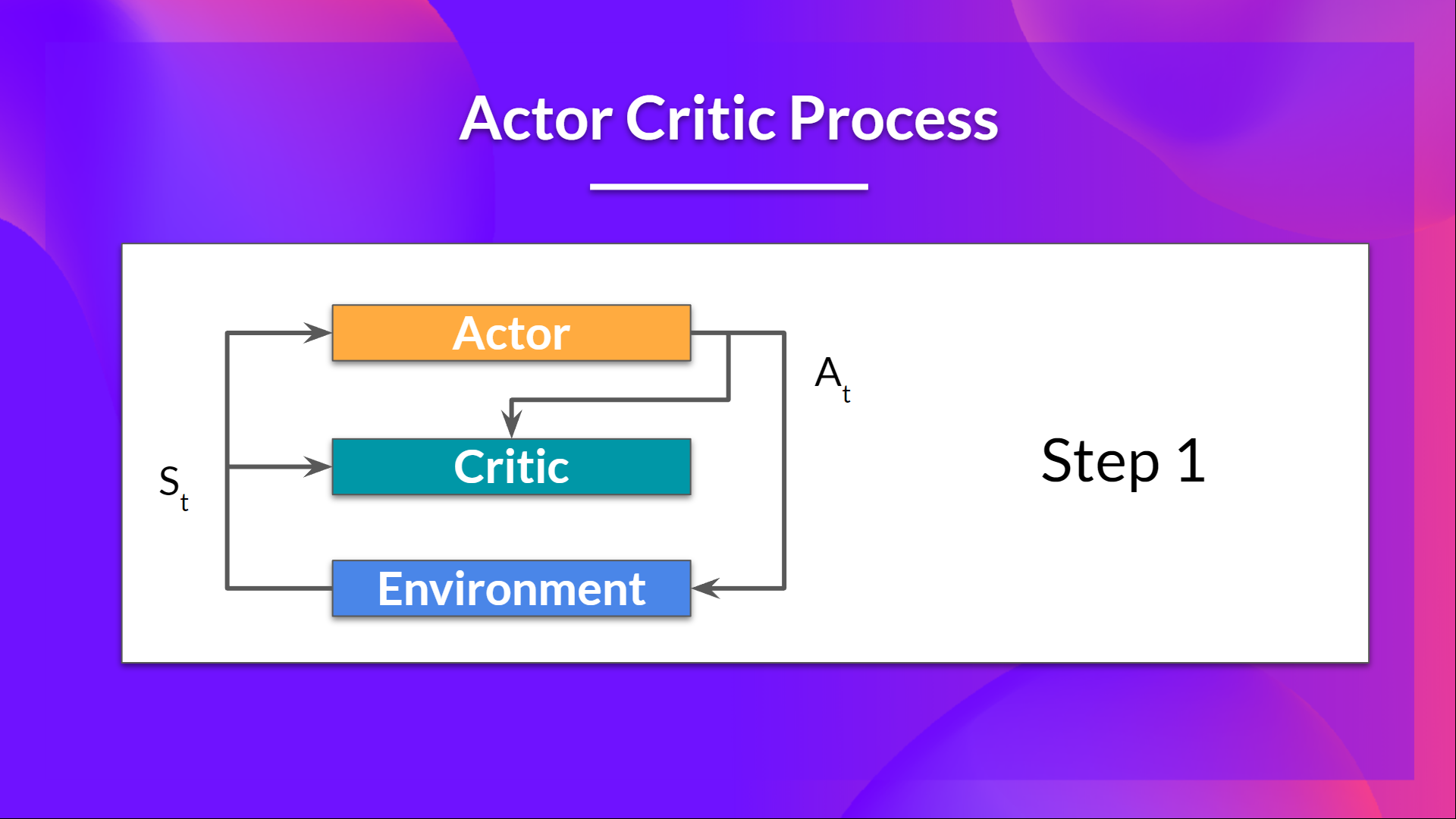
整个流程是这样的:
1.在每个时间步 t,我们从环境中获取当前状态 S_t,并将其作为输入传递给我们的 Actor 和 Critic。
我们的策略接收状态并输出一个动作 A_t。
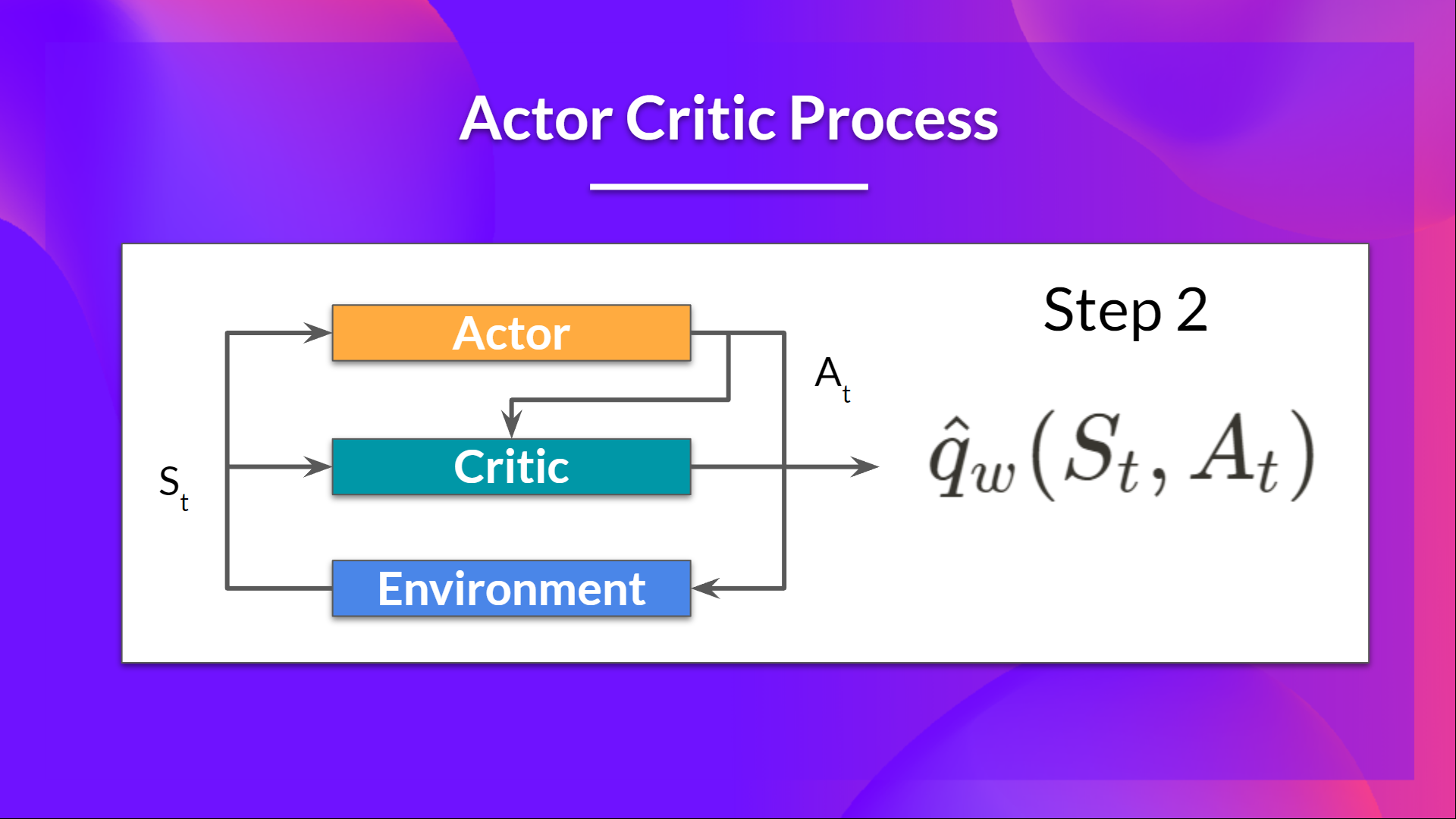
2.批评家还将该动作作为输入,并使用S_t 和 A_t 计算在该状态下采取该动作的价值:Q值。
3.在环境中执行的动作 A_t 会产生一个新的状态 S_{t+1} 和奖励 R_{t+1}。
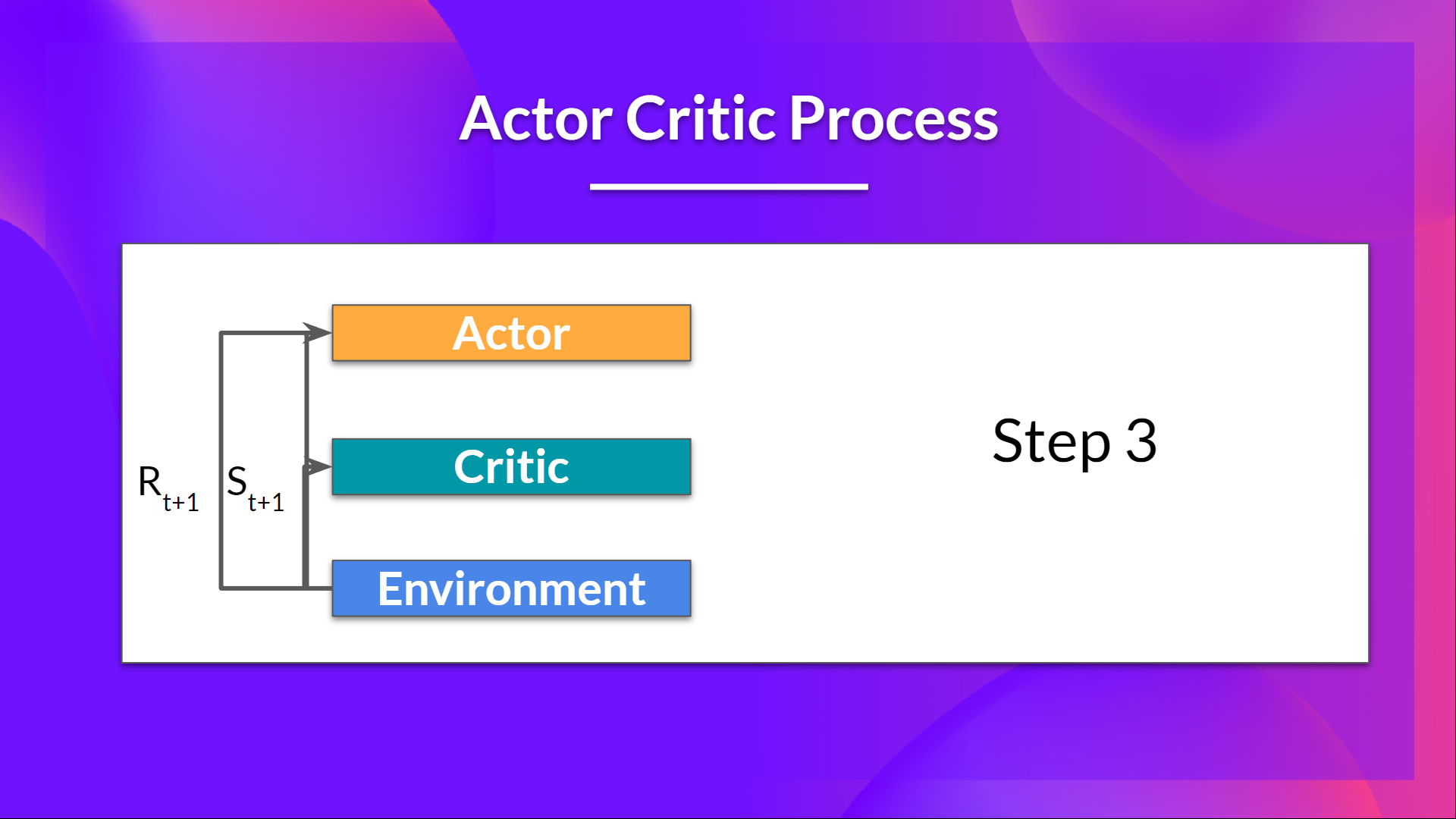
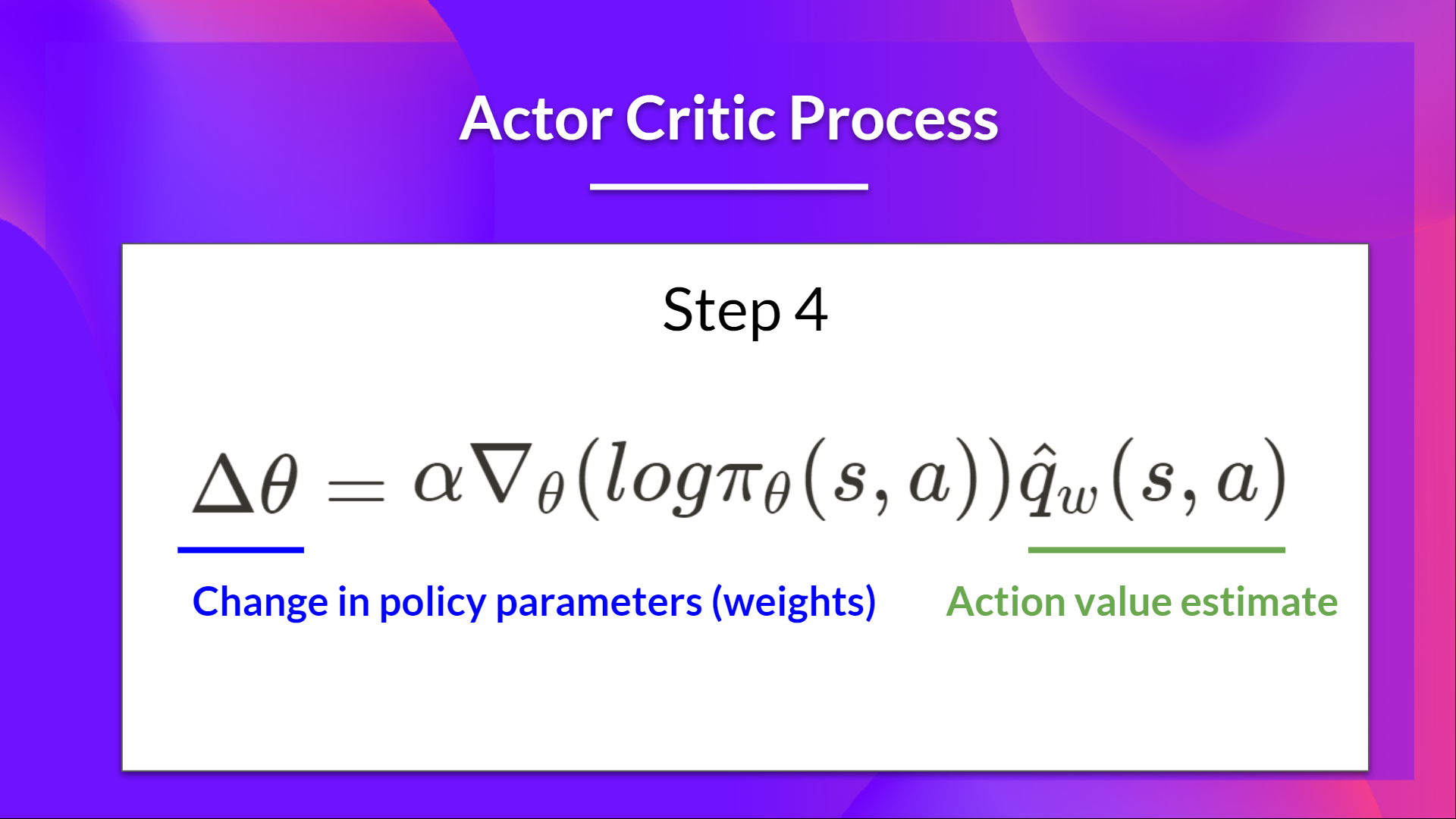
4.演员使用 Q 值来更新其策略参数。
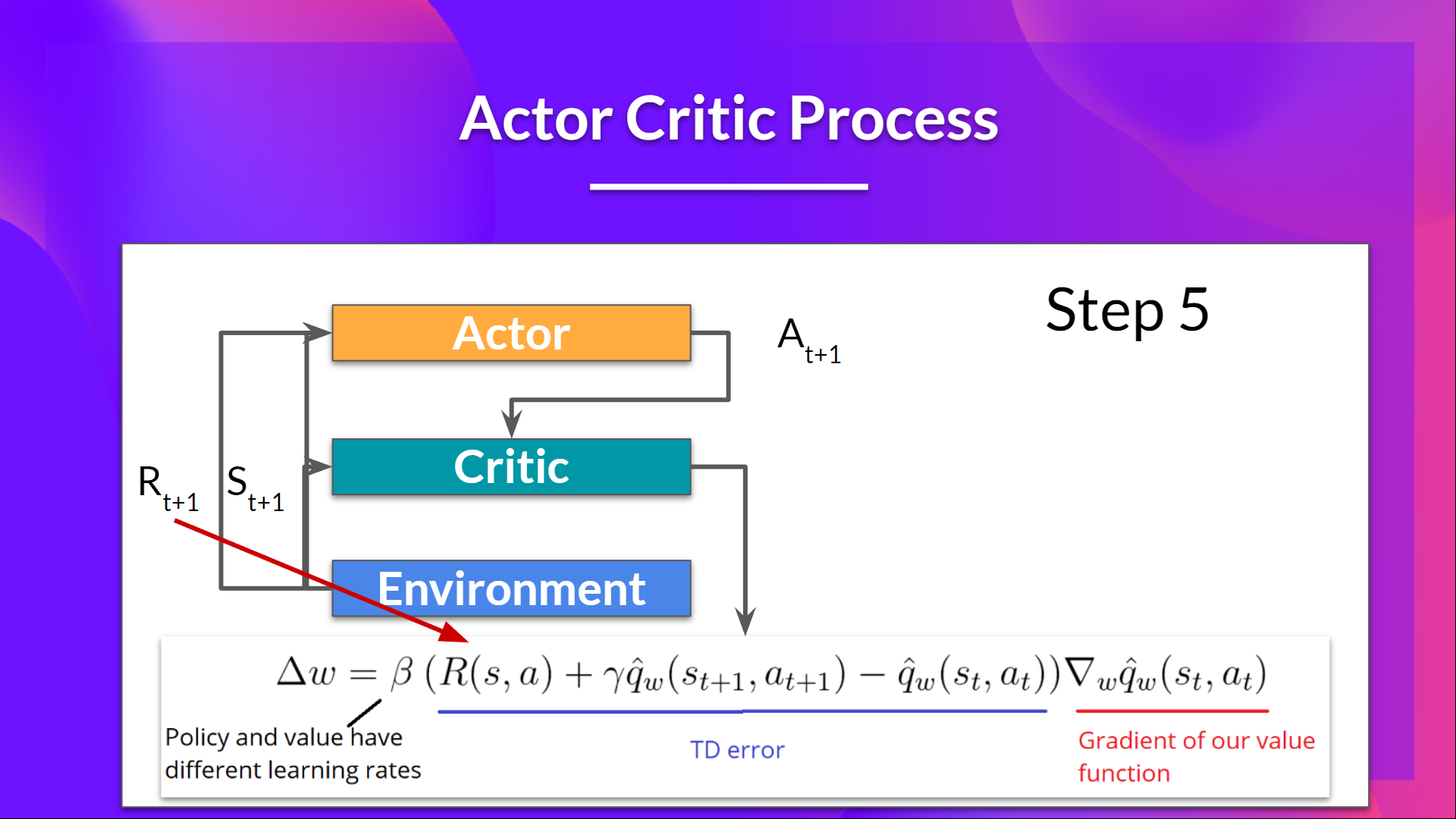
5.由于其更新后的参数,演员会在给定新状态 S_{t+1} 的情况下产生下一步行动 A_{t+1}。然后评论家更新其价值参数。
-
演员 (Actor) 在状态 s做出一个动作 a 。
-
环境 给出奖励 r 和下一个状态 s'。
-
评论家 (Critic) 登场。它不看“一整局”的奖励,它只看“这一步”:
-
它会计算一个叫做 TD 误差 (TD-Error) 的东西:
。
-
翻译成人话:
-
是“我实际得到的奖励 + 下一个状态的预估价值”,这是我们认为的“更靠谱的价值”。
-
-
就是“理想与现实的差距”。
-
-
-
-
指导演员: 如果
(惊喜!你做的比预期的要好),演员就调整策略,增加这个动作
的概率。如果
(失望!你做的比预期的要差),演员就调整策略,减少这个动作 a 的概率。
-
指导评论家:评论家自己也要学习。它发现自己的 V(s) 估算得不准(导致了
-
二,合作与制衡的机理
让我们把 Actor 和 Critic 想象成两个正在共同学习的神经网络。
-
演员 (Actor):它的参数是
。它是一个策略网络,输入状态
,输出动作的概率
-
评论家 (Critic):它的参数是
。它是一个价值网络,输入状态
(一个标量,表示这个状态有多好)。
整个学习过程的核心,就是两个损失函数 (Loss Function)。
1. 评论家 (Critic) 的自我修养:如何成为一个“好”裁判?
评论家的工作是准确地评估状态的价值 V(s)。
它如何知道自己的评估 V(s) 准不准呢?它使用在第一篇中提到的“理想与现实的差距”—— TD 误差 来衡量。
-
现实 (TD 目标):我们在
,进入了下一个状态
。那么,一个“更靠谱”的
-
-
是我们对下一个状态的价值估计 (
是折扣因子)。
-
-
理想 (当前估计):
TD 误差(Temporal-Difference Error) 就等于“现实”减去“理想”:
这个 就是评论家犯的“错误”。
评论家的学习目标 (Loss_Critic):
评论家的目标就是最小化这个错误。最直接的方法就是使用均方误差 (MSE):
Loss_Critic =
-
如何更新: 我们使用梯度下降来最小化这个 Loss。这个过程和 DQN (或 Q-Learning) 的更新几乎一模一样。
-
深刻之处: 评论家在学习时,它只关心一件事:让自己的
2. 演员 (Actor) 的自我提升:如何成为一个“好”演员?
演员的工作是优化策略 ,以便拿到更高的总奖励。
在“盲目试错”的 REINFORCE 算法中,演员的更新信号是 。其中
是“一整局的(加折扣的)总奖励”。我们已经知道,
是一个高方差、不稳定的信号。
在 Actor-Critic 中,我们用评论家给出的 替换掉
。
为什么是 ?这正是 AC 算法最深刻的地方。
演员的学习目标 (Loss_Actor):
演员的目标是最大化“策略梯度”,这个梯度现在变成了:
-
:这是“策略的梯度方向”。它告诉我们,要增加或减少 $a$ 动作的概率。
-
让我们看看 是如何指导演员的:
-
如果
-
含义:
。这意味着,实际发生的(奖励R + 下个状态的价值 V(s'))好于 我们的预期(V(s))。
-
指导: 这是一个“惊喜 (Positive Surprise)”!说明演员在 s 状态下做的动作 a$是个好动作。
-
更新: 演员会更新
-
-
如果
-
含义:
。这意味着,实际发生的差于我们的预期。
-
指导: 这是一个“失望 (Negative Surprise)”!说明动作
-
更新: 演员会更新
-
因此,演员的损失函数 (Loss_Actor) (因为优化器是最小化 Loss,所以我们加个负号)是:
Loss_Actor =
重要提示: 在计算这个 Loss 时, 被视为一个常数。我们不希望演员的更新“反向传播”到评论家网络中去。演员只管“听从”评论家的
指令,而评论家则在另一条线(Loss_Critic)上自我修行。
3. 深刻的联系: 到底是什么?
我们一直说 是 TD 误差,是“惊喜”。但在现代强化学习中,它有另一个更深刻的名字:优势函数 (Advantage Function) 的估计。
优势函数 的定义是:
-
-
-
:“执行动作
是指导演员学习的完美信号。如果 A > 0,就该多做;如果 A < 0,就该少做。
问题是,我们只有一个 V(s) 网络(评论家),我们没有 Q(s, a) 网络啊?
别急,我们来推导一下:
根据 Q 函数的定义, Q(s, a)约等于 (在
之后,期望的即时奖励+下一状态的价值)。
所以:
看!
结论: 评论家在计算自己的 TD 误差 时,在不经意间,计算出了“优势函数 A(s, a)” 的一个(有噪声的)单步估计值!
这就是 Actor-Critic 算法设计的精妙之处。评论家为了最小化自己的 而努力学习
,而它在学习过程中产生的“副产品”
,恰好是演员所需要的、最好的指导信号
。
总结:完整的算法流程
现在我们把 Actor 和 Critic 组合起来,这个算法就是 Advantage Actor-Critic (A2C) 的基础版:
-
初始化: 演员网络
和评论家网络
-
循环(每一步):
a. 演员表演: 在当前状态
。
b. 环境反馈: 得到
c. 评论家评估:
i. 用评论家网络计算:
和
。
ii. 计算
d. 评论家学习: 计算 Loss_Critic =
。对
e. 演员学习: 计算 Loss_Actor =
。对
f. 更新状态:
。
伪代码:
初始化 Actor 网络 π_θ 和 Critic 网络 V_w
循环:
观察状态 s
根据 Actor 生成动作 a
执行动作,获得奖励 r 和新状态 s'
# Critic 更新(学习评价)
目标值 = r + γ * V_w(s')
TD误差 δ = 目标值 - V_w(s)
w ← w + 学习率 * δ * ∇V_w(s)
# Actor 更新(学怎么做)
θ ← θ + 学习率 * δ * ∇log π_θ(a | s)
s ← s'
通过引入评论家 (Critic),我们彻底解决“演员” (Policy-Based) 的高方差问题。
-
演员 (Actor) 不再需要等到一局游戏结束。
-
它每做一步,评论家 (Critic) 都会告诉它一个“即时反馈” (
-
这个反馈信号
这使得 Actor-Critic 既保留了 Policy-Based 方法处理连续动作和随机策略的能力,又获得了 Value-Based 方法的稳定性和单步更新的效率。
三. A2C 与 A3C 的演进(进阶)
我们已经深入了 AC 的核心机理。但这个“基础版AC”仍然存在问题(比如 $\delta$ 还是有噪声、训练不稳定等)。
为什么?因为它“近视”且“短视”。
-
“近视” (高方差的
-
“短视” (数据相关性): 算法每走一步就更新一次。这意味着连续的更新步骤是高度相关的(
总是接着
),这使得训练过程非常低效且容易陷入局部最优(就像DQN需要经验回放池来打破这种相关性)。
为了解决这两个致命问题,Actor-Critic 进化成了它最著名的现代形态:A2C 和 A3C。
1. 解决“近视”问题:N-Step Returns (N步回报)
基础版 AC 用 来指导演员。这里
被称为 TD 目标 (TD-Target)。
这个“目标”太“近”了,只看一步奖励 。我们为什么不看得更远一点呢?
N-Step Returns (N步回报) 的思想:
我们不只看 1 步,我们让演员先表演 N 步(比如 N=5),收集这 N 步的真实奖励,然后再用 N 步之后的 值来做估计。
-
1 步回报 (基础版AC):
-
2 步回报:
-
N 步回报:
现在,我们用这个“更可靠的 N 步回报” 来当做“现实” (TD 目标)。
于是,我们的“优势函数” (即 ) 变成了:
这完美地在“偏差 (Bias)”和“方差 (Variance)”之间做了权衡。
-
REINFORCE (纯PG):
-
基础版 AC:
是“一步回报”。它的“方差”很小(只依赖一步
值)。
-
N 步 AC:
处在两者之间。它用了 N 步的“真实奖励”(低偏差),只在最后一步用了
所有使用 N 步回报来计算优势 的 Actor-Critic 算法
统称为 Advantage Actor-Critic (A2C)。
2. 解决“短视”问题:Asynchronous (异步)
我们解决了“近视” (N-Step) 问题,但“短视” (数据相关性) 问题还在。我们仍然是在一条轨迹上“走 N 步,更新一次,再走 N 步...”。
DQN 使用“经验回放池 (Replay Buffer)”来打破相关性。Actor-Critic 能不能也用?
可以,但是很麻烦。因为 AC 是 On-Policy (在线策略) 算法,它学习的 和 采集数据的
必须是同一个,Replay Buffer 里的“旧数据”不能随便拿来用(除非使用 Off-Policy 修正,如 PPO)。
DeepMind 在 2016 年提出了完全不同的解决方案,这就是 A3C (Asynchronous Advantage Actor-Critic)。
A3C 的核心思想:用“异步”来代替“经验回放池”。
它不是一个“Agent”在学习,而是一群“工人 (Worker)” 在学习。
-
Global Network (全局网络): 我们有一个“主网络” (参数
-
N 个 Workers (N个工人): 我们在 N 个 CPU 核心上(比如 16 个)分别创建 N 个“工人”。
-
并行探索: 每个“工人”都有自己独立的环境(比如一个独立的雅达利游戏模拟器)。
-
工作流程:
-
每个“工人”
先从“主网络”复制一份最新的参数
-
“工人”
-
“工人”
(优势) 和
(价值目标)。
-
“工人”
和
)。
-
“工人”
-
“主网络”收到梯度后,更新自己的参数
-
“工人”
-
A3C 利用“空间”换“时间”。
它通过在同一时间、不同空间(不同环境)中收集大量不相关的经验,完美地解决了“数据相关性”问题。
-
“工人1”可能在游戏A的第10关;“工人2”可能刚在游戏B的第1关开始;“工人3”可能在游戏A的第5关即将失败...
-
当这些“五花八门”的经验所产生的梯度“混合”在一起时,更新信号就变得极其稳定和“去相关” (De-correlated)。
-
这使得 A3C 根本不需要 Replay Buffer,也不需要 GPU,它在 CPU 上就能表现得极其高效和强大。
3. 演进的终点:A2C (现代版)
A3C 的思想是革命性的,但“异步”更新在实现上很复杂(需要多线程锁、参数服务器)。
后来,研究者们(特别是 OpenAI)发现:我们真的需要“异步”吗?
-
A3C 的核心是“多个并行环境”带来的去相关性,而不是“异步”本身。
于是,一个更简单、更强大的版本出现了,它就是现代版的 A2C(有时也被称为“A2C (batched)”):
-
同步 A2C (现代版):
-
我们依然有 N 个“工人”在 N 个并行环境里。
-
同步开始: 所有工人同时开始,用相同的策略
玩 N 步。
-
同步等待: 等所有工人都完成了 N 步,把他们收集到的数据 (s, a, r, s') 全都汇总起来,形成一个大的 Batch (批次)。
-
同步更新: 我们用这个大 Batch 的数据,计算一次总的 Loss (Actor 和 Critic),并一次性地执行梯度下降。
-
同步重复: 所有工人用更新后的新策略,回到第 2 步。
-
这个“同步”的 A2C,实现简单(不需要复杂的多线程管理),并且常常比 A3C 的效果更好(因为它一次性利用了一个大 Batch 的信息,梯度更稳定)。
今天的 A2C (同步版) 和在其基础上改进的 PPO (Proximal Policy Optimization),已经成为强化学习中策略梯度方法的事实标准。
结语
Actor-Critic 并不是某个单一算法,而是一种结构模式。
它把强化学习从“要么纯评分、要么纯策略”这两条极端路线中解放出来,让智能体能够“像人一样”:
一边行动
一边反思
一边改进

















 算法详解:从基础理念到 A3C 演进&spm=1001.2101.3001.5002&articleId=154876902&d=1&t=3&u=0ea5266d67e24b23b9dc2e1bb8fd2544)
 3108
3108

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









