







上一步:sift:(第三步)为关键点赋予方向_zzz_zzzz_的博客-优快云博客
我觉得最难理解的是这个第四步,就是看似简单,细究的话,还需要好好想想。
先说目的:通过前面的三大步骤,我们找到了关键点并且知道了它们的位置、尺度以及方向信息。下面就是要利用这些信息来构造一种特征描述方法,进而对关键点进行描述。描述是为了后面特征点匹配的任务。剧透一下,这个描述符就是一个【128维的向量】,叫做关键点描述子(Sift描述子),其中包含了特征点周围像素的信息,实际上是对关键点周围区域进行的信息描述。
看看具体怎么做的?
旋转到主方向
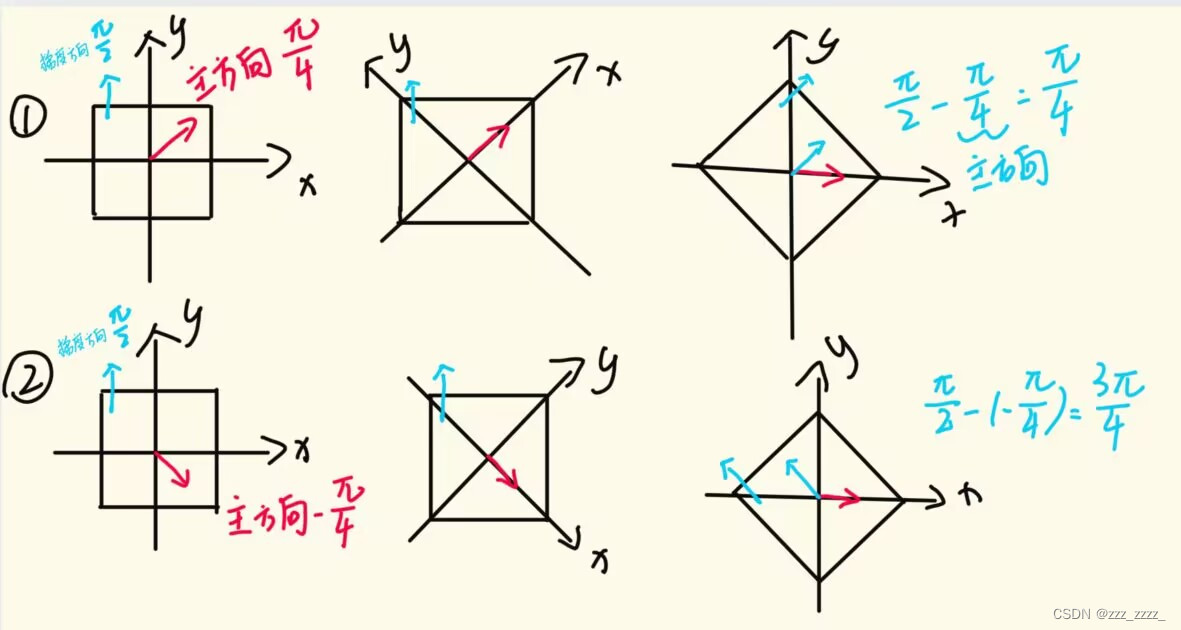
为了满足旋转不变性,要先将该关键点的局部区域旋转到其主方向上。旋转公式如下:
推导如下:
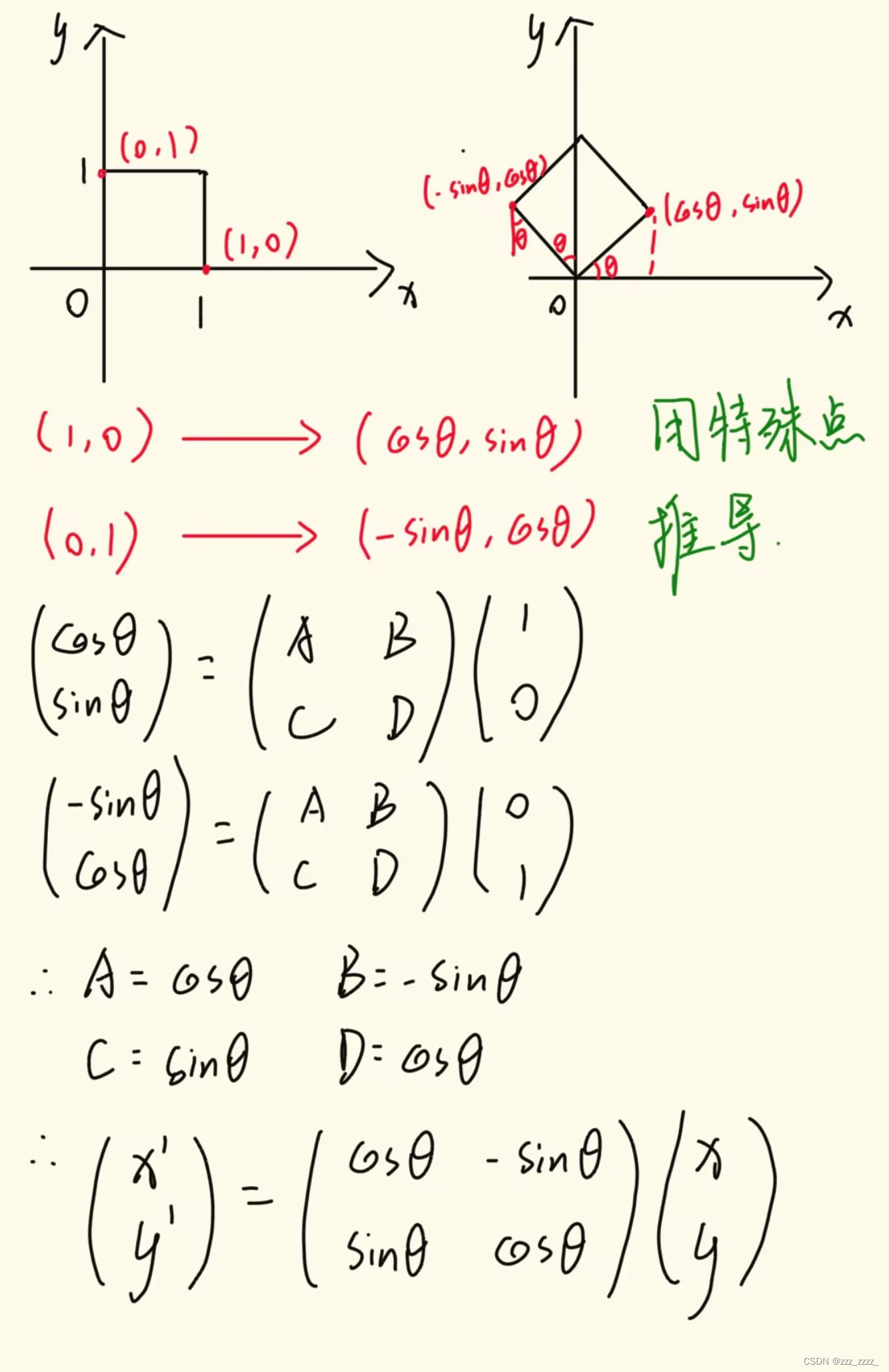
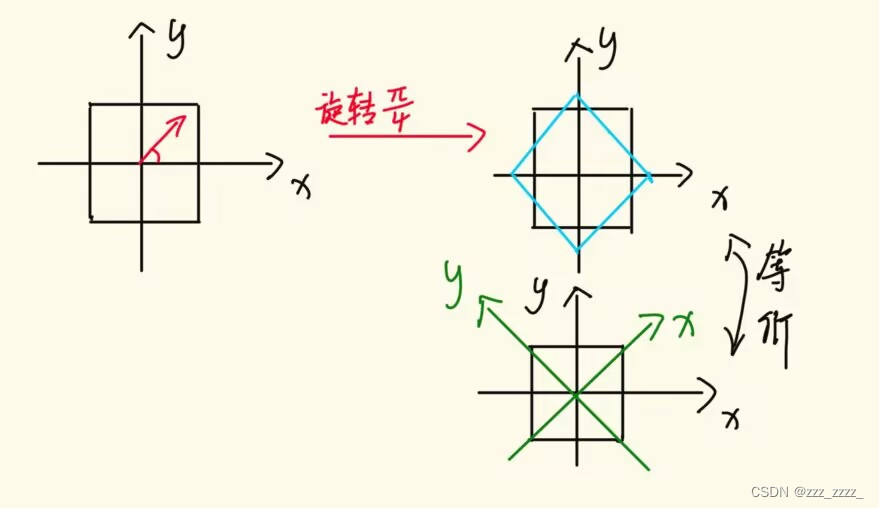
如果旋转的中心是原心,而图像又是关于旋转中心(原心)全对称的,所以,让图像旋转度后图像的新坐标等同于将两个坐标轴旋转
度。示例如下:
我们要将关键点附近一定区域内的像素进行旋转,那么再来看这个区域的大小应该选取多少?
这个是答案:![]()
解释如下:
描述子中要涵盖关键点周围一定区域内像素的信息,先把这个区域分为d*d个子区域,建议d取4,也就是4*4的子区域。每个子区域的大小选择经验值3*(这里的
和第三步中的高斯模糊的系数1.5*
中的
是一样的,都是
,s是要从多少张图片中提取特征的值,L是关键点所在组的层数)。那么也就是这个区域的像素宽度为
。
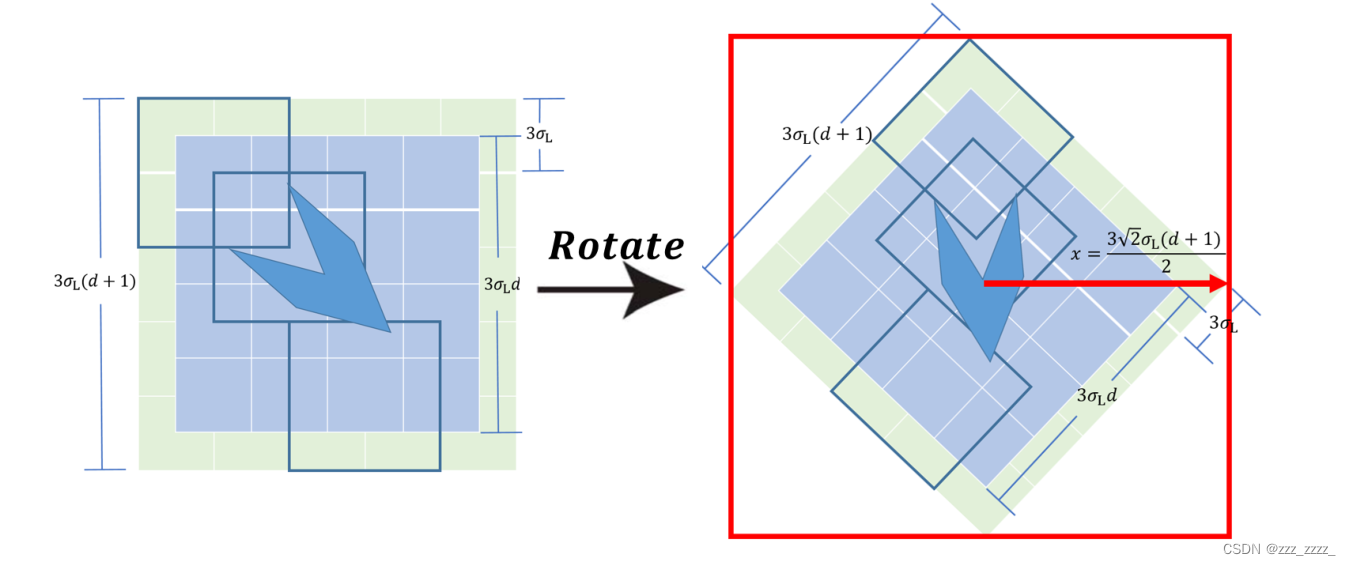
像素就是一个小正方形块,这一个小块的值全都是同一个数。由于正方形中心计算更复杂,我们将正方形左下点看作像素位置。关键点并不一定是在像素位置,因为对关键点进行了精确定位。因此,其他像素位置的采样也不一定是在像素上,所以需要插值。进行双线性插值,所以,旋转的区域扩大,像素宽度为。
又由于图像需要旋转,以旋转中可能出现的最大边长为需要进行旋转的区域范围,像素宽度为。所以,半径就变成了
。
确定了区域之后,这个区域内的采样点都要进行旋转,也就是:
根据旋转的要求,我们需要将更大范围的像素进行旋转,但是我们生成描述子向量的采样范围其实就是d*d范围,旋转取更大范围只是为了让采样范围都包含其中。

确定采样点
旋转的范围比采样的范围大,所以要进一步确定采样点所处的范围。
这里的公式是:
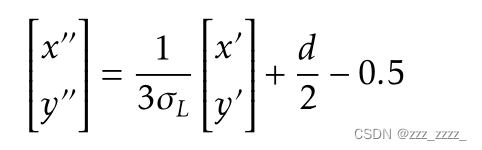
先不看-0.5,运算公式将坐标都计算在[0,0]-[d,d]范围内。前面部分差不多是先缩放,再平移的。我觉得从实例化的角度能比较好的理解:
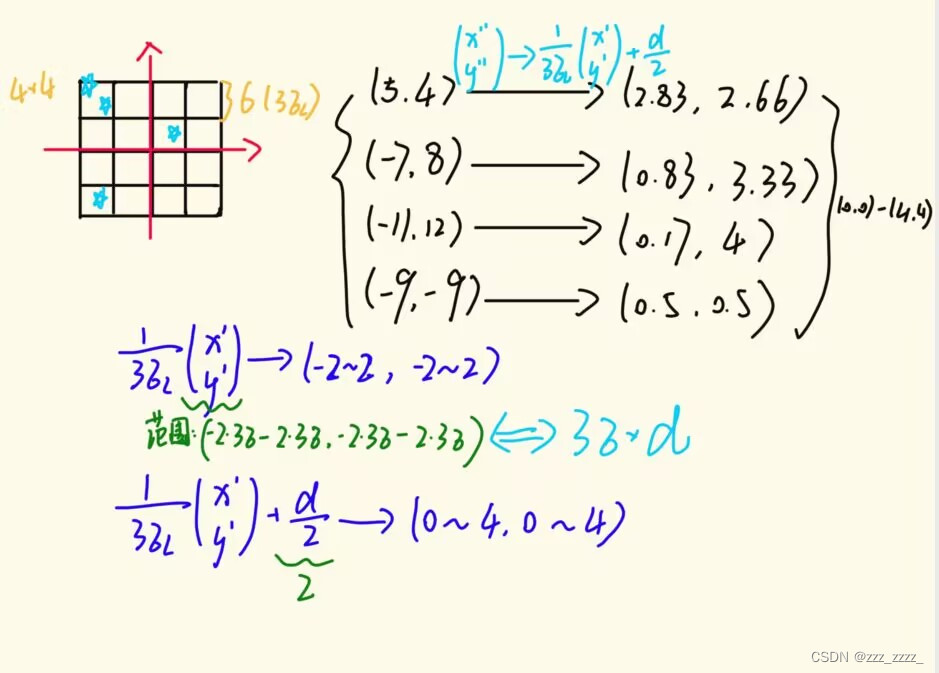
至于再减去-0.5,是因为我们将像素左下角位置等同于该点的像素位置,所以经常会将当前点偏移0.5个像素。如下图:
如果计算后处于[0,0]-[4,4]之间的,认为是采样点。
128维向量?
将区域内每个采样点像素的梯度大小和方向进行采样。采样后,根据主方向计算旋转后新的梯度方向:grad_ori -= ori(ori为主方向),对于这个式子的解释如下:
由旋转后的梯度方向可以将对应方向划分到8个bin中,公式为:obin = grad_ori * bins_per_rad ( grad_ori为旋转后的梯度方向,bins_per_rad 为8/(2*CV_PI)
此外,还要进行高斯滤波,离关键点近的权重大,远的权重小。计算权重公式为:

等于

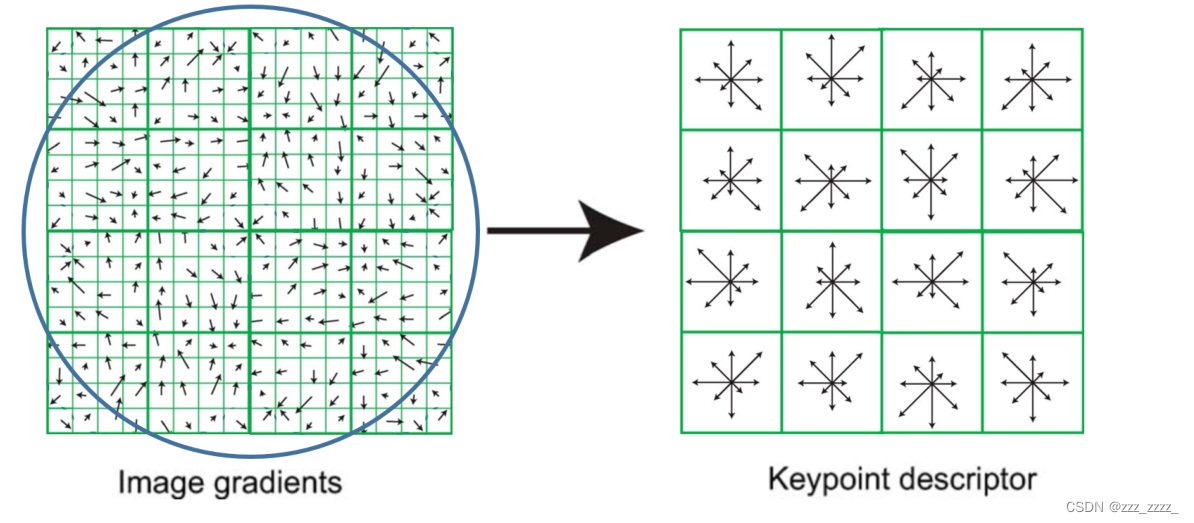
然后,对每个子区域内的梯度方向进行统计(也就像投票那样,把高斯模糊后的梯度幅值加和到对应的方向中),分为8个方向。这样以来,Sift描述子就是4*4*8=128维的向量了。
三线性插值
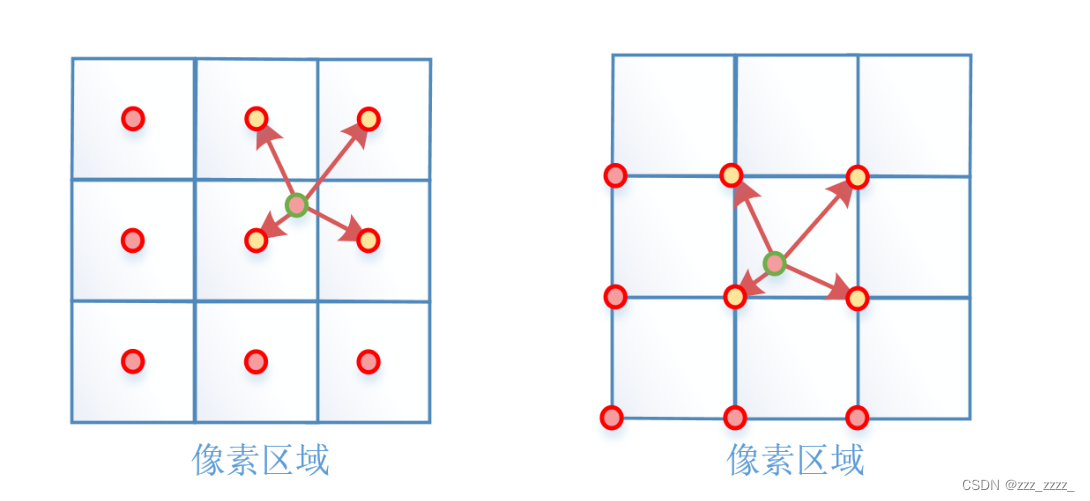
因为采样点不一定是在像素位置,而是更精确的位置。在构建Sift描述子时,要将该采样点的值按照一定规则的比重“投射”到像素位置上。
双线性插值: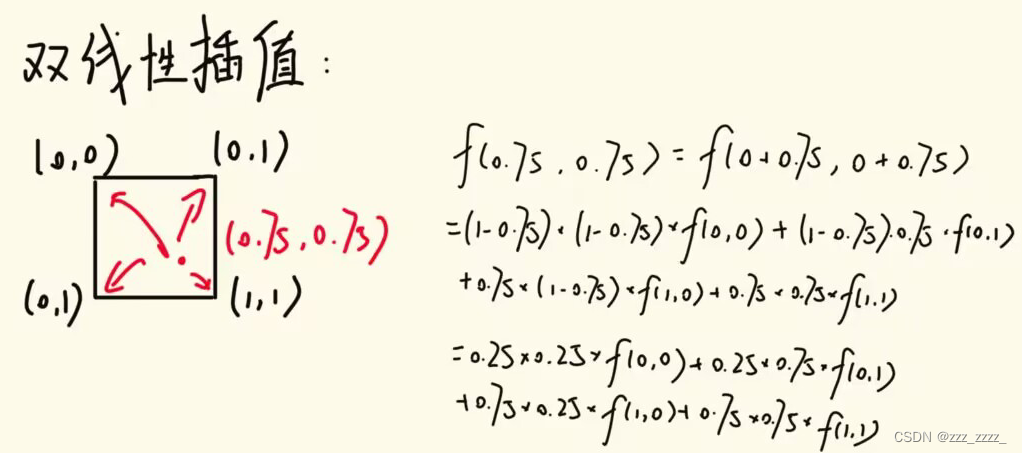
再举一个双线性插值的例子:现有一个点(x整+x小,y整+y小)x整为1,x小为0.25,y整为1,y小为0.75,即(1+0.25,1+0.75)。被(1,1)(1,2)(2,1)(2,2)包围。(2,1)这个点对应贡献值为f(2,1)*0.25*(1-0.25)。
三线性插值也是同理。
上例都是用周围点求其中的一个精确点,而Sift相当于“反其道而行之”,是将一个点的值按比重分配到周围点上。
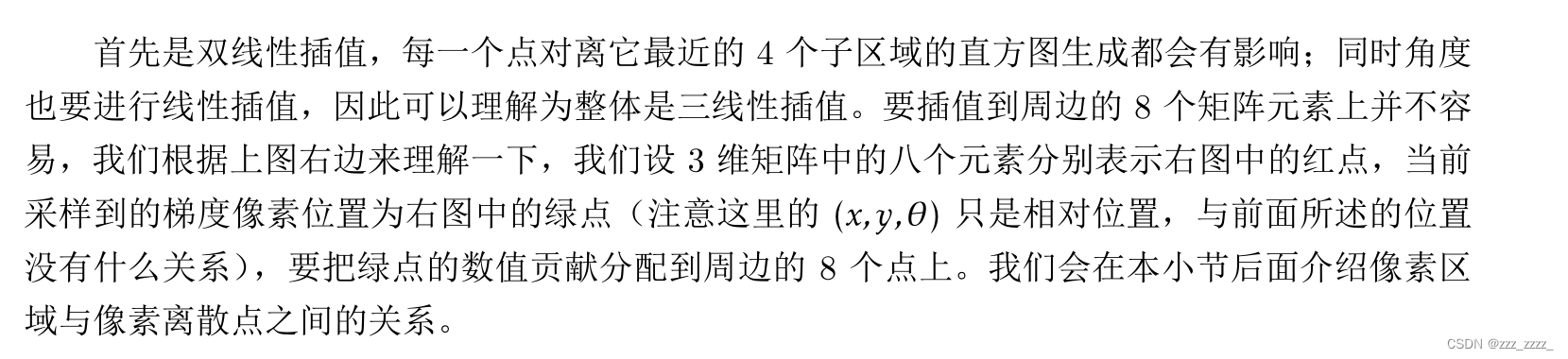
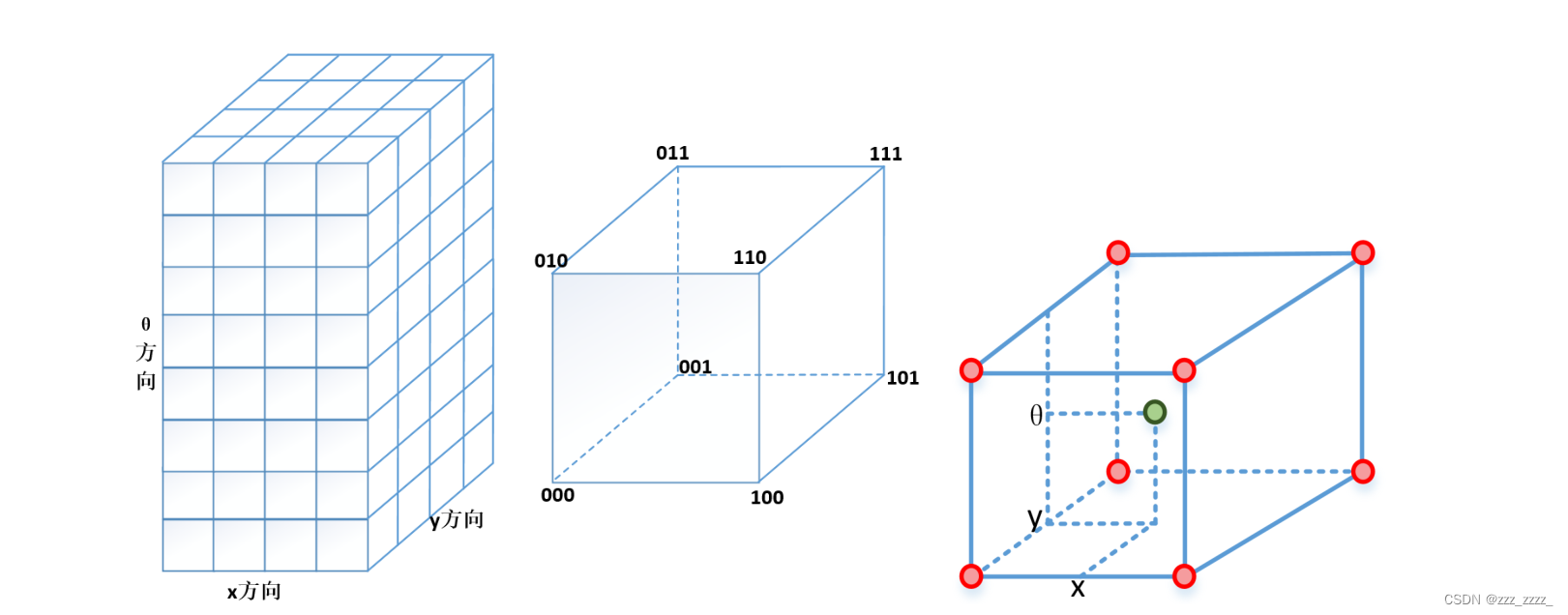
上图左表示了向量维数是4*4*8。【形象化表示】上图右,实际采样点的位置是绿色的(比较的精确),要将该点的值插值到它周围8个点中。
看懂这个代码就明白了
for( r = 0; r <= 1; r++ ) //r=0,r=1
{
rb = r0 + r;//rb取整,值范围:x整+0(rb:-1 ~ 3),x整+1(rb:0 ~ 4)
if( rb >= 0 && rb < d )//范围之外无需插值,指的是-1和4
{
v_r = mag * ( ( r == 0 )? 1.0 - d_r : d_r );
row = hist[rb];//指针
for( c = 0; c <= 1; c++ ) //c=0,c=1
{
cb = c0 + c;//cb取整,值范围:y整+0(cb:-1 ~ 3),y整+1(cb:0 ~ 4)
if( cb >= 0 && cb < d )//范围之外无需插值,指的是-1和4
{
v_c = v_r * ( ( c == 0 )? 1.0 - d_c : d_c );
h = row[cb];//指针 hist[rb][cb]
for( o = 0; o <= 1; o++ )//o=0,o=1
{
ob = ( o0 + o ) % n;//ob取整,值范围:0-7
v_o = v_c * ( ( o == 0 )? 1.0 - d_o : d_o );
h[ob] += v_o;//hist[rb][cb][ob]+=v_o
}
}
}
}
}
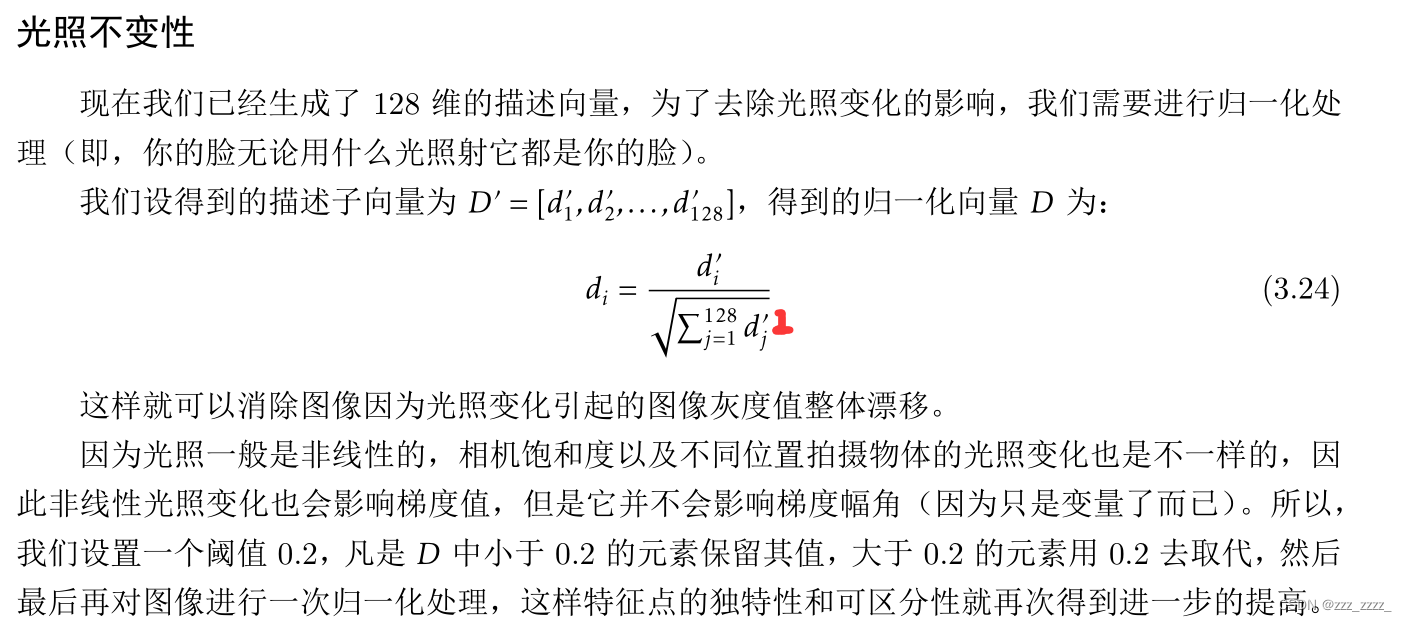
光照不变性
Lowe,D 的SIFT代码
调用大框架
//第四步:特征描述符的构建的大框架
/*
Computes feature descriptors for features in an array. Based on Section 6
of Lowe's paper.
@param features array of features(特征点序列)
@param gauss_pyr Gaussian scale space pyramid(高斯金字塔)
@param d width of 2D array of orientation histograms(d为4)
@param n number of bins per orientation histogram(n为8)
*/
static void compute_descriptors( CvSeq* features, IplImage*** gauss_pyr, int d,
int n )
{
struct feature* feat;
struct detection_data* ddata;
double*** hist;//存放描述符
int i, k = features->total;//k为特征点的总个数
for( i = 0; i < k; i++ )
{
feat = CV_GET_SEQ_ELEM( struct feature, features, i );//将特征点序列中的第i个特征赋值给feat
ddata = feat_detection_data( feat );
hist = descr_hist( gauss_pyr[ddata->octv][ddata->intvl], ddata->r,
ddata->c, feat->ori, ddata->scl_octv, d, n );//调用函数descr_hist,对一个指定的特征点构造描述符
hist_to_descr( hist, d, n, feat );//调用函数hist_to_descr,光照不变性
release_descr_hist( &hist, d );//调用函数release_descr_hist,释放
}
}旋转到主方向,调用三线性插值计算4*4*8维描述符
//对指定的特征点构造描述符
/*
Computes the 2D array of orientation histograms that form the feature
descriptor. Based on Section 6.1 of Lowe's paper.
@param img image used in descriptor computation(关键点所在高斯金字塔对应的图像)
@param r row coord of center of orientation histogram array(关键点x坐标)
@param c column coord of center of orientation histogram array(关键点y坐标)
@param ori canonical orientation of feature whose descr is being computed(关键点的方向)
@param scl scale relative to img of feature whose descr is being computed(ddata->scl_octv,高斯金字塔层数对应的高斯系数)
@param d width of 2d array of orientation histograms(d为4)
@param n bins per orientation histogram(n为8)
@return Returns a d x d array of n-bin orientation histograms.
*/
static double*** descr_hist( IplImage* img, int r, int c, double ori,
double scl, int d, int n )
{
double*** hist;
double cos_t, sin_t, hist_width, exp_denom, r_rot, c_rot, grad_mag,
grad_ori, w, rbin, cbin, obin, bins_per_rad, PI2 = 2.0 * CV_PI;
int radius, i, j;
//为描述符hist分配空间(4*4*8=128位向量)
//4*4*8
hist = calloc( d, sizeof( double** ) );
for( i = 0; i < d; i++ )
{
hist[i] = calloc( d, sizeof( double* ) );
for( j = 0; j < d; j++ )
hist[i][j] = calloc( n, sizeof( double ) );
}
cos_t = cos( ori );//余弦
sin_t = sin( ori );//正弦
bins_per_rad = n / PI2;// 8/2*CV_PI
exp_denom = d * d * 0.5;//计算权重需要用到
hist_width = SIFT_DESCR_SCL_FCTR * scl;//子区域的像素宽度
//根据旋转的要求,我们需要将更大范围的像素进行旋转,但是我们生成描述子向量的采样范围其实就是d*d范围,旋转取更大范围知识为了让采样范围都包含其中。
radius = hist_width * sqrt(2) * ( d + 1.0 ) * 0.5 + 0.5;//旋转的半径
for( i = -radius; i <= radius; i++ )
for( j = -radius; j <= radius; j++ )//对旋转区域进行采样
{
/*
Calculate sample's histogram array coords rotated relative to ori.
Subtract 0.5 so samples that fall e.g. in the center of row 1 (i.e.
r_rot = 1.5) have full weight placed in row 1 after interpolation.
*/
c_rot = ( j * cos_t - i * sin_t ) / hist_width;//余弦
r_rot = ( j * sin_t + i * cos_t ) / hist_width;//正弦
rbin = r_rot + d / 2 - 0.5;//当前采样点合理的x域(-0.5~3.5)
cbin = c_rot + d / 2 - 0.5;//当前采样点合理的y域(-0.5~3.5)
if( rbin > -1.0 && rbin < d && cbin > -1.0 && cbin < d )//属于采样区域
if( calc_grad_mag_ori( img, r + i, c + j, &grad_mag, &grad_ori ))//计算采样点的梯度幅值和梯度方向
{
grad_ori -= ori;//梯度方向也要旋转到主方向
while( grad_ori < 0.0 )//控制调整后的梯度方向要在0-2*CV_PI这个范围内
grad_ori += PI2;
while( grad_ori >= PI2 )
grad_ori -= PI2;
obin = grad_ori * bins_per_rad;//grad_ori*(8/2*CV_PI),obin在0~8之间
w = exp( -(c_rot * c_rot + r_rot * r_rot) / exp_denom );//高斯权重
interp_hist_entry( hist, rbin, cbin, obin, grad_mag * w, d, n );//调用函数interp_hist_entry,三线性插值
}
}
return hist;
}三线性插值
//三线性插值,将一个采样点的值(赋值*权重)进行贡献分配
/*
Interpolates an entry into the array of orientation histograms that form
the feature descriptor.
@param hist 2D array of orientation histograms(hist:4*4*8的Sift描述子)
@param rbin sub-bin row coordinate of entry(rbin:0-4之间)
@param cbin sub-bin column coordinate of entry(cbin:0-4之间)
@param obin sub-bin orientation coordinate of entry(obin:0-8之间)
@param mag size of entry(赋值*权重)
@param d width of 2D array of orientation histograms(d为4)
@param n number of bins per orientation histogram(n为8)
*/
static void interp_hist_entry( double*** hist, double rbin, double cbin,
double obin, double mag, int d, int n )
{
double d_r, d_c, d_o, v_r, v_c, v_o;
double** row, * h;
int r0, c0, o0, rb, cb, ob, r, c, o;
//整数
r0 = cvFloor( rbin );
c0 = cvFloor( cbin );
o0 = cvFloor( obin );
//小数
d_r = rbin - r0;
d_c = cbin - c0;
d_o = obin - o0;
/*
The entry is distributed into up to 8 bins. Each entry into a bin
is multiplied by a weight of 1 - d for each dimension, where d is the
distance from the center value of the bin measured in bin units.
*/
//三线性插值 hist[4][4][4]
//rbin:-0.5 - 3.5 r0:-1~3
//cbin:-0.5 - 3.5 c0:-1~3
//obin:0-8 o0:0-7
for( r = 0; r <= 1; r++ ) //r=0,r=1
{
rb = r0 + r;//rb取整,值范围:x整+0(rb:-1 ~ 3),x整+1(rb:0 ~ 4)
if( rb >= 0 && rb < d )//范围之外无需插值,指的是-1和4
{
v_r = mag * ( ( r == 0 )? 1.0 - d_r : d_r );
row = hist[rb];//指针
for( c = 0; c <= 1; c++ ) //c=0,c=1
{
cb = c0 + c;//cb取整,值范围:y整+0(cb:-1 ~ 3),y整+1(cb:0 ~ 4)
if( cb >= 0 && cb < d )//范围之外无需插值,指的是-1和4
{
v_c = v_r * ( ( c == 0 )? 1.0 - d_c : d_c );
h = row[cb];//指针 hist[rb][cb]
for( o = 0; o <= 1; o++ )//o=0,o=1
{
ob = ( o0 + o ) % n;//ob取整,值范围:0-7
v_o = v_c * ( ( o == 0 )? 1.0 - d_o : d_o );
h[ob] += v_o;//hist[rb][cb][ob]+=v_o
}
}
}
}
}
}两次归一化处理,满足光照不变性(不懂的是,为什么转为uchar时,乘以512.0)
//光照不变性
/*
Converts the 2D array of orientation histograms into a feature's descriptor
vector.
@param hist 2D array of orientation histograms(Sift描述子)
@param d width of hist(d为4)
@param n bins per histogram(n为8)
@param feat feature into which to store descriptor(特征点)
*/
static void hist_to_descr( double*** hist, int d, int n, struct feature* feat )
{
int int_val, i, r, c, o, k = 0;
for( r = 0; r < d; r++ )
for( c = 0; c < d; c++ )
for( o = 0; o < n; o++ )
feat->descr[k++] = hist[r][c][o]; //4*4*8
feat->d = k;//128
normalize_descr( feat );//调用函数normalize_descr,进行单位化操作
for( i = 0; i < k; i++ )
if( feat->descr[i] > SIFT_DESCR_MAG_THR )//SIFT_DESCR_MAG_THR为0.2(阈值)
feat->descr[i] = SIFT_DESCR_MAG_THR;//大于0.2的用0.2替代
normalize_descr( feat );//调用函数normalize_descr,再进行单位化操作
/* convert floating-point descriptor to integer valued descriptor */
for( i = 0; i < k; i++ )
{
int_val = SIFT_INT_DESCR_FCTR * feat->descr[i];//SIFT_INT_DESCR_FCTR为512.0,作为浮点型转换为整型时所用到的系数
feat->descr[i] = MIN( 255, int_val );//最后要将数据保存再uchar类型的存储结构中,因此乘以这个系数
}
}归一化操作
//Sift特征子的单位化
/*
Normalizes a feature's descriptor vector to unitl length
@param feat feature(特征值序列)
*/
static void normalize_descr( struct feature* feat )
{
double cur, len_inv, len_sq = 0.0;
int i, d = feat->d;
for( i = 0; i < d; i++ )
{
cur = feat->descr[i];
len_sq += cur*cur;
}
len_inv = 1.0 / sqrt( len_sq );
for( i = 0; i < d; i++ )
feat->descr[i] *= len_inv;//代公式
}释放描述子空间
//释放描述符空间
/*
De-allocates memory held by a descriptor histogram
@param hist pointer to a 2D array of orientation histograms
@param d width of hist
*/
static void release_descr_hist( double**** hist, int d )
{
int i, j;
for( i = 0; i < d; i++)
{
for( j = 0; j < d; j++ )
free( (*hist)[i][j] );
free( (*hist)[i] );
}
free( *hist );
*hist = NULL;//最后,将指针置为空
}
















 3260
3260

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









