







测度的绝对连续性(Absolute continuity of measures)
定义. 假设 B \mathcal{B} B 是定义于 X X X 的子集上的一个 σ \sigma σ-代数, μ , ν \mu, \nu μ,ν 是 B \mathcal{B} B 上的两个测度, 如果对于任意满足 μ ( A ) = 0 \mu(A)=0 μ(A)=0 的子集 A ∈ B A\in\mathcal{B} A∈B,有 ν ( A ) = 0 \nu(A)=0 ν(A)=0,则我们称 ν \nu ν 相对于 μ \mu μ 是绝对连续的。
Radon-Nikodym定理. 如果测度
ν
\nu
ν 相对于
μ
\mu
μ 是绝对连续的,那么存在一个函数
f
∈
L
1
(
μ
)
f\in L^1(\mu)
f∈L1(μ) 使得
ν
=
f
μ
\nu=f\mu
ν=fμ,i.e.,
ν
(
A
)
=
∫
A
f
d
μ
∀
A
∈
B
\nu(A)=\int_A fd\mu \qquad \forall A\in\mathcal{B}
ν(A)=∫Afdμ∀A∈B
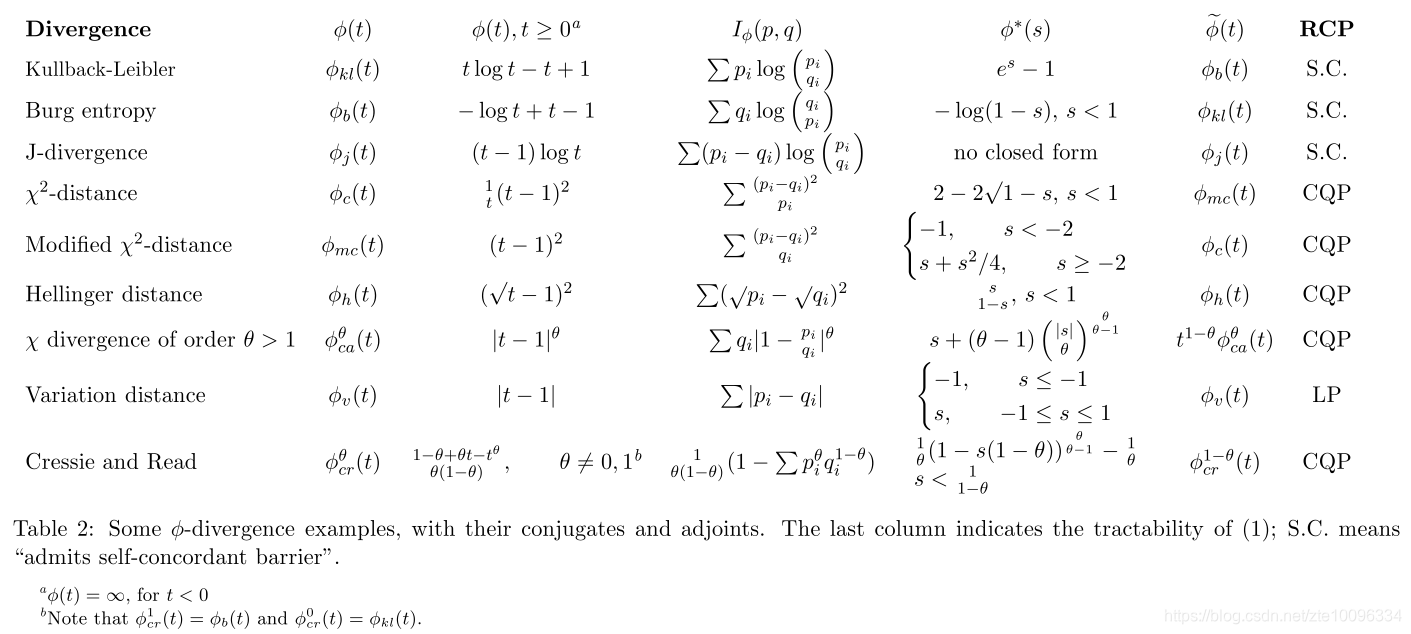
ϕ \phi ϕ-divergence


















 1755
1755

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











