




坐标系
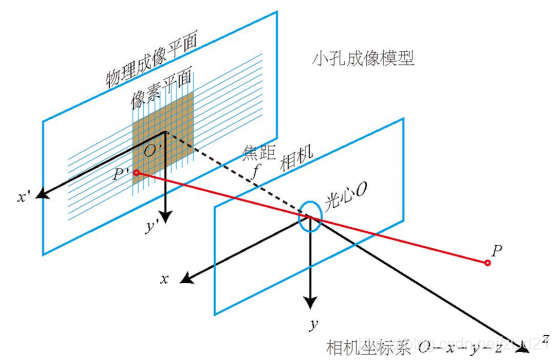
针孔相机模型存在四个坐标系:世界坐标系、摄像机坐标系、图像物理坐标系和图像像素坐 标系。
假设:
• 世界坐标系的坐标为Pw(Xw,Yw,Zw),
• 对应的摄像机坐标系坐标为Po(x,y,z),
• 对应的图像物理坐标系的坐标为P’(x’,y’),
• 对应的图像像素坐标系的坐标为p(u,v)。
| 名称 | 定义 |
|---|---|
| 世界坐标系 | 是客观三维世界的绝对坐标系,也称客观坐标系。就是物体在真实世界中的坐标。 世界坐标系是随着物体的大小和位置变化的,单位是长度单位。 |
| 相机坐标系 | 以相机的光心为坐标系的原点,以平行于图像的x和y方向为x轴和y轴,z轴和光轴平行,x, y,z互相垂直,单位是长度单位。 |
| 图像物理坐标系 | 以主光轴和图像平面交点为坐标原点,x’和y’方向如图所示,单位是长度单位。 |
| 图像像素坐标系 | 以图像的顶点为坐标原点,u和v方向平行于x’和y’方向,单位是以像素计。 |
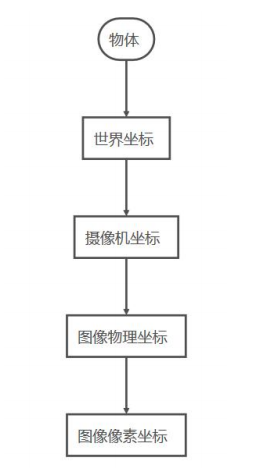
世界坐标系到摄像机坐标系
这两个坐标系之间除了旋转矩阵R,还存在平移矩阵t。其关系可表示为:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1203
1203

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









