




大林控制算法(Dahlin Algorithm) 是一种专门针对纯滞后系统的控制方法,它基于离散化的数学模型,将系统的目标输出设计为一个期望响应,利用反向推导的方式计算控制器的输出。此方法的特点是响应速度快,且在满足设计模型的情况下,具有较好的控制性能。
1. 纯滞后系统的特点
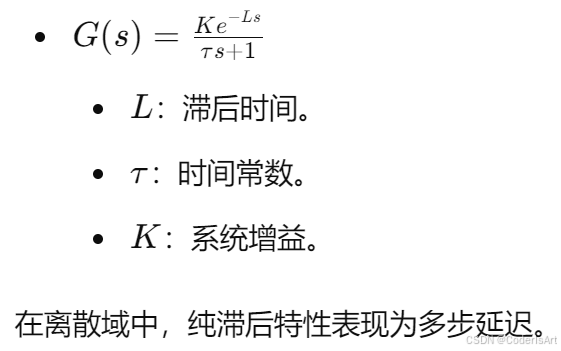
纯滞后系统是指系统的输出滞后于输入,且滞后时间不能被轻易补偿。例如:
2. Dahlin控制算法原理
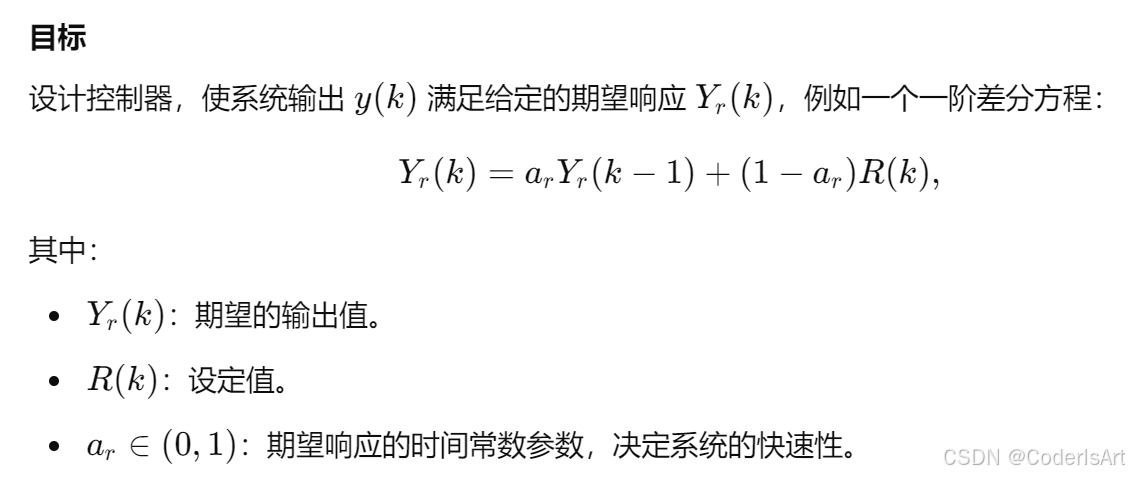
控制器实现
控制器实现需要用差分方程计算控制输出:
u(k)=基于误差和模型反演的控制量.u(k) = \text{基于误差和模型反演的控制量}.u(k)=基于误差和模型反演的控制量.
3. Dahlin算法的离散化实现
以下是大林控制算法的实现步骤:
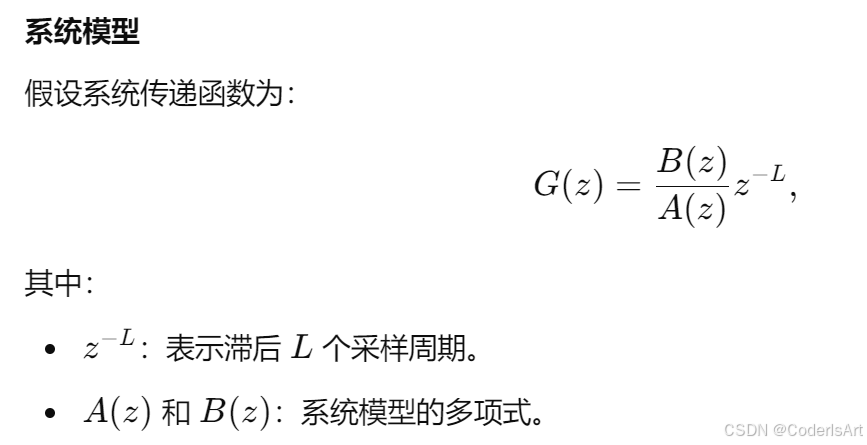
- 离散化系统模型: 使用 Z 变换得到系统的离散模型 G(z)G(z)G(z)。
- 选择期望响应 ara_rar: 确定 ara_rar 来决定系统响应的快慢。
- 计算控制器系数: 根据公式计算 Gc(z)G_c(z)Gc(z) 的系数。
- 在线计算控制信号: 根据离散差分方程实时计算控制信号。
4. C++ 实现代码
下面的代码是一个基于 Dahlin 算法的控制器的实现:
#include <iostream>
#include <vector>
class DahlinController {
private:
double ar; // 期望闭环时间常数
int delay; // 系统滞后步数
std::vector<double> A; // 系统模型分母系数
std::vector<double> B; // 系统模型分子系数
std::vector<double> u; // 控制信号历史值
std::vector<double> y; // 输出信号历史值
std::vector<double> r; // 设定值历史值
public:
// 构造函数
DahlinController(double ar, int delay, std::vector<double> A, std::vector<double> B)
: ar(ar), delay(delay), A(A), B(B) {
u.resize(d 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 8177
8177

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









