







 本文介绍了ROS(RobotOperatingSystem)的基础概念,如工作区管理、功能包创建和编译,以及如何使用ROS进行话题和服务编程,以控制小乌龟画圆。同时,还涉及了OpenCV库的安装和使用,包括打开图片进行特效展示和从摄像头读取视频的实例。
本文介绍了ROS(RobotOperatingSystem)的基础概念,如工作区管理、功能包创建和编译,以及如何使用ROS进行话题和服务编程,以控制小乌龟画圆。同时,还涉及了OpenCV库的安装和使用,包括打开图片进行特效展示和从摄像头读取视频的实例。
目录
一.ROS基础练习
1.区分工作区间
| 名称 | 用途 |
|---|---|
| src | 代码空间 |
| build | 编辑空间 |
| devel | 开发空间 |
| install | 安装空间 |
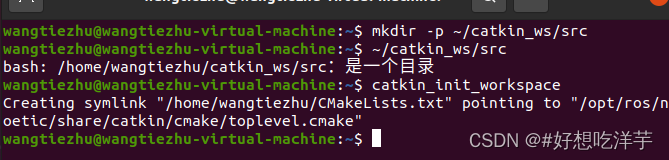
1.1创建工作空间
mkdir -p ~/catkin_ws/src#创建文件夹
cd ~/catkin_ws/src#进入目录
catkin_init_workspace#初始化,使其成为ROS的工作空间
1.2编辑工作空间
cd ..
catkin_make
1.3设置环境变量
source /home/lyy/catkin_ws/devel/setup.bash#该环境变量设置只对当前终端有效,lyy是用户名
#将上面命令放置到~/.bashrc文件中,让其对所有终端都有效
sudo nano ~/.bashrc
1.4检查环境变量
echo $ROS_PACKAGE_PATH
2.功能包
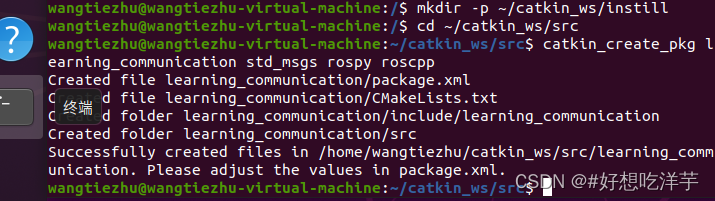
2.1创建功能包
cd ~/catkin_ws/src
catkin_create_pkg learning_communication std_msgs rospy roscpp
#catkin_create_pkg 功能包名字 依赖
#std_msgs:定义的标准的数据结构
#rospy:提供python编程接口
#roscpp:提供c++编程接口
2.2编译功能包
cd ~/catkin_ws
catkin_make
二.ROS话题与服务编程——控制小乌龟画圆圈
控制小乌龟画圆圈(旋转),并且通过代码订阅小乌龟的实时位置,并在终端打印
2.1创建小乌龟画圆发送程序
2.1.1新建一个终端,命名为终端1,创建工程文件包
cd ~/ros/src/comm/src

2.1.2新建画圆程序为yuan.cpp
touch yuan.cpp
2.1.3打开文件夹将如下命令写入yuan.cpp中
2.1.3.1打开文件夹
gedit yuan.cpp
2.1.3.2写入命令
#include "ros/ros.h"
#include "std_msgs/String.h"
#include<geometry_msgs/Twist.h> //运动速度结构体类型 geometry_msgs::Twist的定义文件
int main(int argc, char *argv[])
{
ros::init(argc, argv, "vel_ctrl"); //对该节点进行初始化操作
ros::NodeHandle n; //申明一个NodeHandle对象n,并用n生成一个广播对象vel_pub
ros::Publisher vel_pub = n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel", 10);
ros::Publisher chatter_pub = n.advertise<std_msgs::String>("chatter", 1000);
ros::Rate loop_rate(10);
//vel_pub会在主题"/turtle1/cmd_vel"(机器人速度控制主题)里广播geometry_msgs::Twist类型的数据
//ros::Rate loopRate(2);
ROS_INFO("draw_circle start...");//输出显示信息
while(ros::ok())
{
geometry_msgs::Twist vel_cmd; //声明一个geometry_msgs::Twist 类型的对象vel_cmd,并将速度的值赋值到这个对象里面
vel_cmd.linear.x = 2.0;//前后(+-) m/s
vel_cmd.linear.y = 0.0; //左右(+-) m/s
vel_cmd.linear.z = 0.0;
vel_cmd.angular.x = 0;
vel_cmd.angular.y = 0;
vel_cmd.angular.z = 1.8; //机器人的自转速度,+左转,-右转,单位是rad/s
vel_pub.publish(vel_cmd); //赋值完毕后,发送到主题"/turtle1/cmd_vel"。机器人的核心节点会从这个主题接受发送过去的速度值,并转发到硬件体上去执行
std_msgs::String msg;
std::stringstream ss;//定义输出流对象
ss <<vel_cmd;
msg.data = ss.str();
/**
* The publish() function is how you send messages. The parameter
* is the message object. The type of this object must agree with the type
* given as a template parameter to the advertise<>() call, as was done
* in the constructor above. 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1856
1856

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









