







一.实验一
实验目的
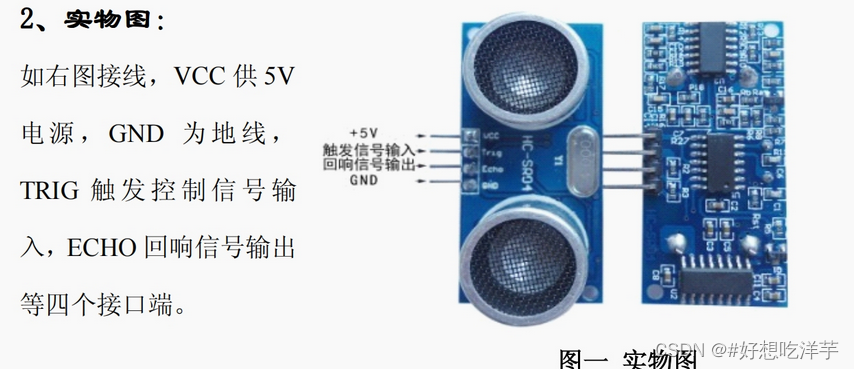
采用stm32F103和HC-SR04超声波模块, 使用标准库或HAL库+ 定时器中断,完成1或2路的超声波障碍物测距功能。
测试数据包含噪声,程序需要进行滤波处理;将测距数值通过串口上传到上位机串口助手
使用的硬件
STM32F103C8T6最小开发板
HC-SR04
ST-Link(其他烧录器也可以)
HC-SR04
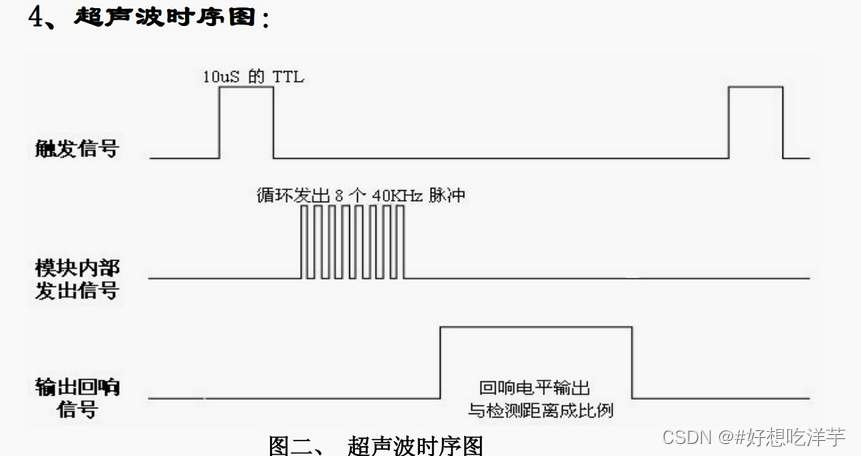
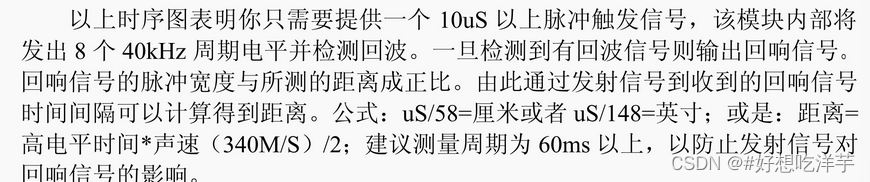
通过时序图我们可以知道,我们给HC-SR04发送长达10us的TTL脉冲,然后模块就会进行测距,测距的结果通过回响信号传达,回响的TTL电平信号时间即是超声波从HC-SR04模块发出,触碰到障碍物后返回到HC-SR04模块的时间总和。
TTL是逻辑电平标准,当电压达到2.4V5V之间,那么为逻辑1(高电平),电压在0V0.4V之间,那么为逻辑0(低电平)。所以我们可以直接通过GPIO口来输出以及输入时序所需的电平信号。
总所周知,声音的速度为340m/s,因此我们将回响电平的时间除340再除2之后得到的就是单位为米的测距结果。
实现方法
我们仅需提供10us的高电平给Trig口即可。然后HC-SR04在测量完毕之后会将结果通过Echo回响回来。
所以我们只需要将Trig口拉高,等待10us(最好再延长一些,代码中用的是15us)后再拉低即可。
接着就只需要等待Echo将数据传输回来,通过时序图我们可以得知回响信号是拉高Echo口,再拉低,中间持续的时间就是测距的结果。
所以我们给Echo口配置一个中断事件,设置为上跳变下跳变都触发,另外再用一个变量记录Echo口到底是拉高还是拉低即可。
如果是拉高,那么我们需要记录下持续的时间,这时候我们需要用定时器计时,所以需要在一开始的时候就配置好定时器的初始化。唯一的问题就是该如何配置定时器的预分频器和自动重装器了。
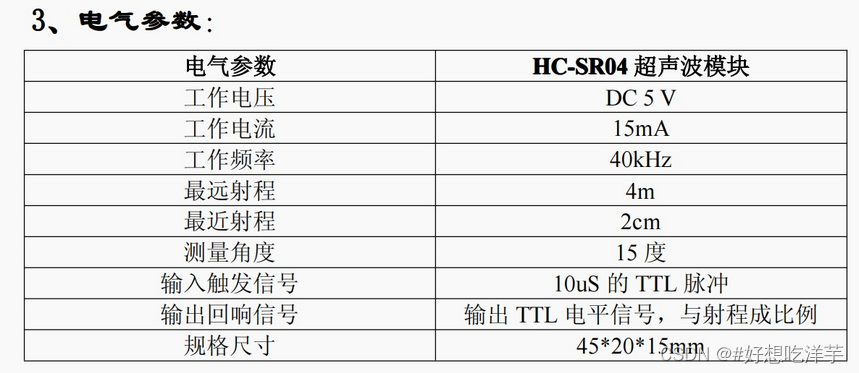
根据说明书我们可以知道HC-SR04的精度为3mm,而测距的公式为 us/58-cm,稍加计算可知,如果我们需要测量3mm,那么得到的时间为17.4us,以此为一个刻度,那么定时器的频率应该为57471Hz。然而这样太麻烦了,而且也不好用,因此我们可以随意一些,我在代码中使用的是预分频器为72,自动重装器为100,那么得到的频率为72MHz/72/100=1000Hz,也就是一次定时器中断的时间为100us,而自动重装器里的每一个值就是1us,所以每次外部中断的下降沿触发之后只需要将定时器触发的次数*100再加上自动重装器里的值就可以得到回响信号的持续时间了,单位是us。
配置HAL库
GPIO配置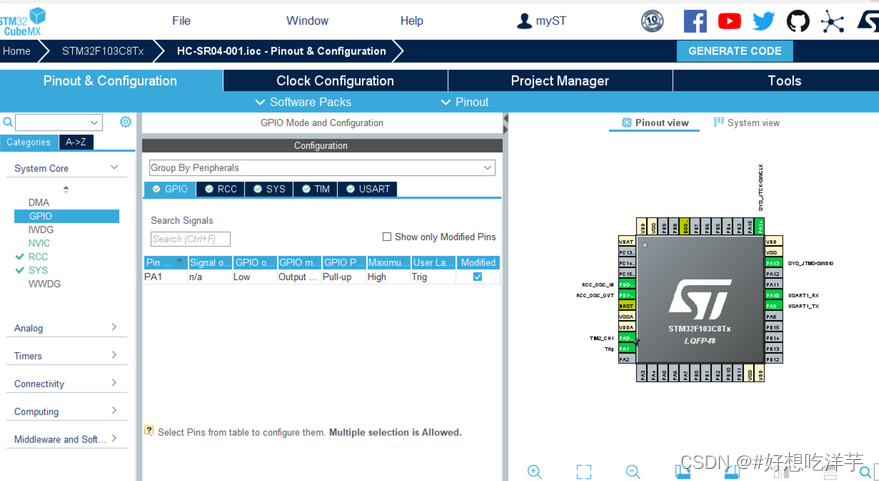
NVIC配置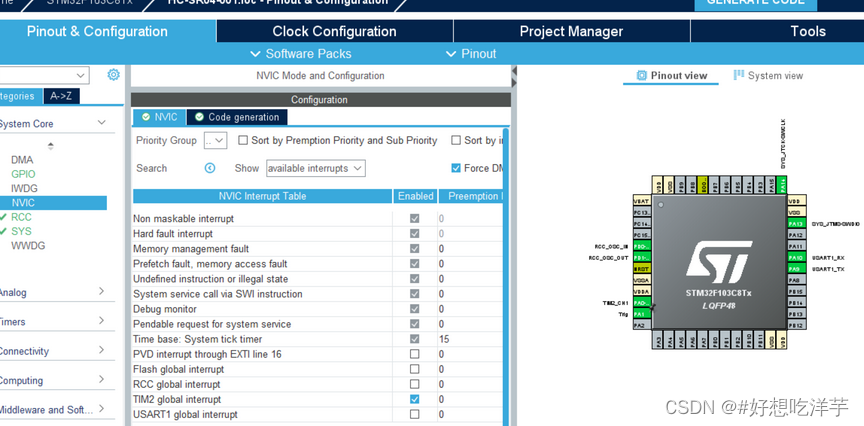
RCC配置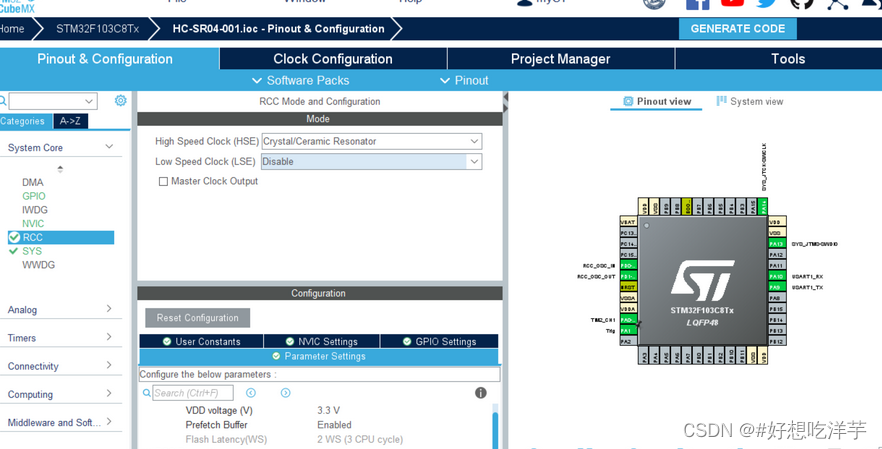
SYS配置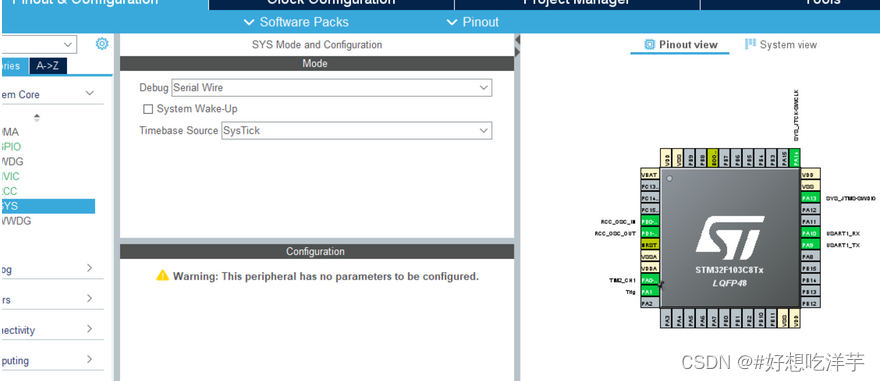
主要代码
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2024 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "tim.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "SR04.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM2_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
SR04_GetData( );
HAL_Delay(1500);
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInit 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1641
1641

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









