




相机内参和外参
内参
相机内参分为内参矩阵和畸变参数矩阵
1、下面给出了内参矩阵,需要注意的是,真实的镜头还会有径向和切向畸变,而这些畸变是属于相机的内参的。
内参矩阵如下:
fx,fy为焦距,一般情况下,二者相等,x0、y0为主点坐标(相对于成像平面),s为坐标轴倾斜参数,理想情况下为0。
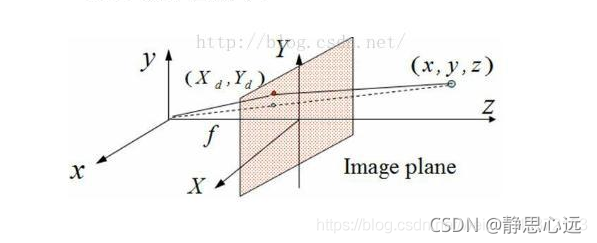
2、畸变参数:k1,k2,k3径向畸变系数,p1,p2是切向畸变系数。径向畸变发生在相机坐标系转图像物理坐标系的过程中。而切向畸变是发生在相机制作过程,其是由于感光元平面跟透镜不平行。
3.切向畸变:产生的原因透镜不完全平行于图像平面,这种现象发生于成像仪被粘贴在摄像机的时候。
4.径向畸变:产生原因是光线在远离透镜中心的地方比靠近中心的地方更加弯曲径向畸变主要包含桶形畸变和枕形畸变两种。
下面两幅图是这两种畸变的示意:
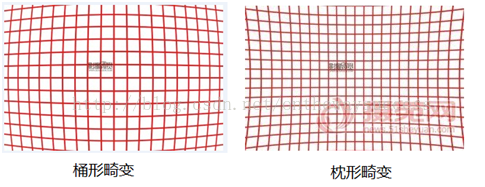
它们在真实照片中是这样的:

5.摄像机镜头畸变
由于摄像机物镜系统设计、制作、装配所引起的像点偏离其理想位置点位误差称为光学畸变,如下图所示:
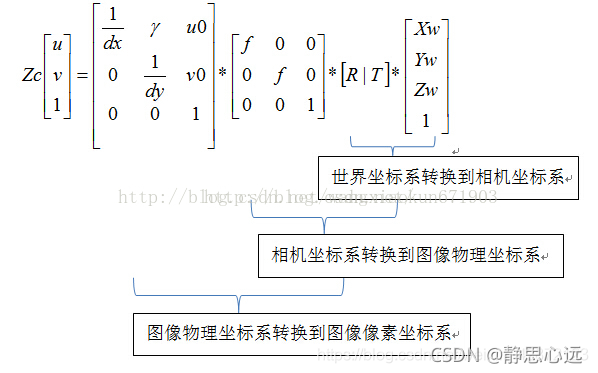
其总的转换关系:
相机外参
分为旋转矩阵和平移矩阵
旋转矩阵和平移矩阵共同描述了如何把点从世界坐标系转换到摄像机坐标系
1、旋转矩阵:描述了世界坐标系的坐标轴相对于摄像机坐标轴的方向
2、平移矩阵:描述了在摄像机坐标系下,空间原点的位置
reference
1.相机内参和外参的解释
2.相机针孔模型----从世界坐标系,到相机坐标系,再到图像物理坐标系,最后到图像像素坐标系的转换过程解析
3.双目相机的畸变校正以及平行校正(极线校正)的入门问题总结
4.内参、外参、畸变参数三种参数与相机的标定方法与相机坐标系的理解
5.相机内参和外参


















 3847
3847

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









