




 本文详细介绍了SLAM后端优化中的两种关键方法:位姿图(PoseGraph)优化和因子图优化。位姿图优化通过去掉特征点,仅保留位姿节点,以提高实时性和减少计算负担;因子图则利用贝叶斯网络和概率论,通过因子节点表示变量间的约束,实现更通用的优化。文章还提供了g2o和gtsam库在实际代码中的应用示例。
本文详细介绍了SLAM后端优化中的两种关键方法:位姿图(PoseGraph)优化和因子图优化。位姿图优化通过去掉特征点,仅保留位姿节点,以提高实时性和减少计算负担;因子图则利用贝叶斯网络和概率论,通过因子节点表示变量间的约束,实现更通用的优化。文章还提供了g2o和gtsam库在实际代码中的应用示例。
前一章主要介绍了BA图优化的后端方法,这种方法可以同时优化相机位姿和路标点位置。这里的路标点其实就是特征点,往往数量巨大,对存储和计算都会带来巨大的负担,并且会不断累加,导致在大场景下无法实时化。
特征点的数量远大于位姿节点的数量,一个关键帧的特征点往往会有几百个关键帧。对于BA优化的方法,即使利用稀疏性,达到实时也只能有几万个点。那么为了解决实时性的问题,可以适当丢弃一些历史数据,想Sliding Window(滑动窗口法);或则直接选择不对路标点进行优化,只保留位姿之间的约束条件,使用Pose Graph。
一, 位姿图
1.1 Pose Graph的意义
BA优化的主要计算压力来自于对特征点的优化,因为随着特征点的不断增加,计算效率就会不断降低。实际上,在经过数次观测后,那些收敛的特征点,空间位置估计就会在某一个值附近保持不动;而发散的外点通常就看不到了。所以可不可以假设一个特征点,经过几次优化后就可以不再考虑,只把他们看作位姿估计的约束,而不再去对他的位置进行优化。
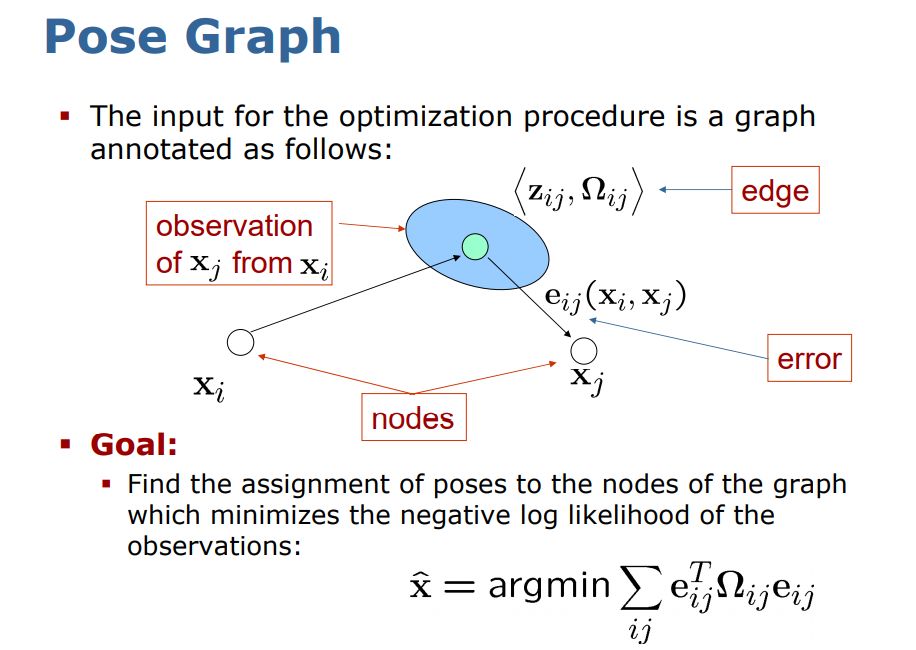
那如果考虑算法更快,完全不去考虑路标点的优化,只管轨迹优化呢?构建一个只有轨迹而没有特征点的图优化,节点为各个时刻的位姿,节点之间的边为由相邻两帧之间的特征匹配的结果作为初值。与BA优化不同的是,一旦初始估计完成后,就不再去考虑优化特征点位置,而只关心所有的相机位姿之间的联系。过程如下所示:
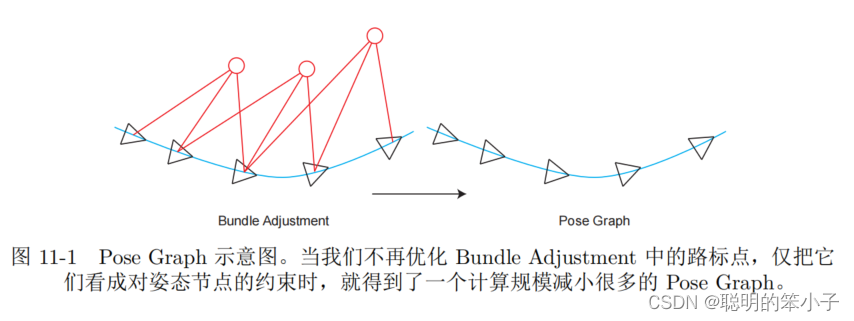
在Pose Graph问题中,每个节点就是相机此时的位姿,用它的李代数()表示;图的边就是根据相邻帧估计的位姿节点之间相对运动,这个估计结果可能来自直接发或则特征点法。在实际的SLAM框架中,也可能会有其他的约束条件,比如来自闭环检测的约束。这个运动在李代数上的定义为:

而按照李群的写法为:
![]()
就像之前在视觉里程计中说的1,这个估计本身就会存在误差,所以等式不会精确的成立。所以可以设最小二乘误差,利用优化方法求解最优值。误差可以定义为:

可以看到误差定义式子中和
代表相邻帧估计结果,即相对位姿,可以通过IMU,lidar或则是camera传感器,使用一定的算法得到,例如ego-emotion,scan-registration,ICP等,是已知量,而待优化量则是前后两个时刻的相机位姿
和
,因此对这两项求导来得到雅可比矩阵。按照李代数的求导方式,分别给
和
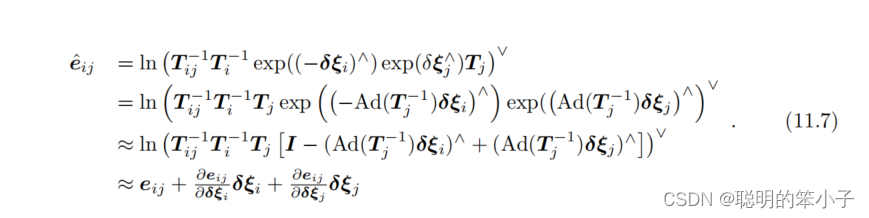
各一个左扰动:
和
,于是误差变为:

如果想利用BCH公式来近似的话,需要将中间的两个扰动项移到式子左边或则右边。这里使用下面的伴随性质:
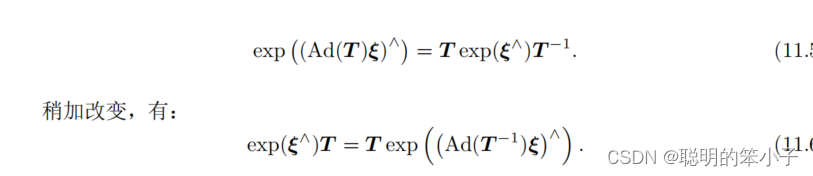
就有:
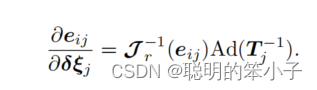
因此,按照李代数上的求导法则,对的雅可比矩阵就是:
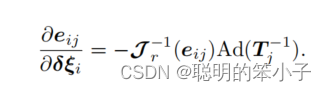
对的雅可比矩阵就是:

得到雅可比矩阵后,剩下就是定义目标函数,使用图优化的方法求解。总体目标函数为:

其中代表节点i和j之间的信息矩阵(information matrix),信息矩阵用来代表边的不确定度,信息矩阵越大代表这条边在优化的过程中越重要。
Pose Gragh的优势:求解问题存在稀疏性,可以加快求解速度,并且对于初始状态的变化较为鲁棒。
Pose Gragh的缺点:对外点(outliers,亲切一点就是错的离谱的结果)不具有鲁棒性,另外,优化估计Rotation的过程是一个非凸优化问题,容易造成导致局部最优问题,且不保证全局最优问题。
重磅论文精读!SLAM中姿态估计的图优化方法比较_问题_约束_Pose (sohu.com)这个文章了使用不同框架,在相同的而数据集(INTEL, MIT两个数据集)上求解Pose Graph问题的对比。
1.2 Pose Graph代码实践
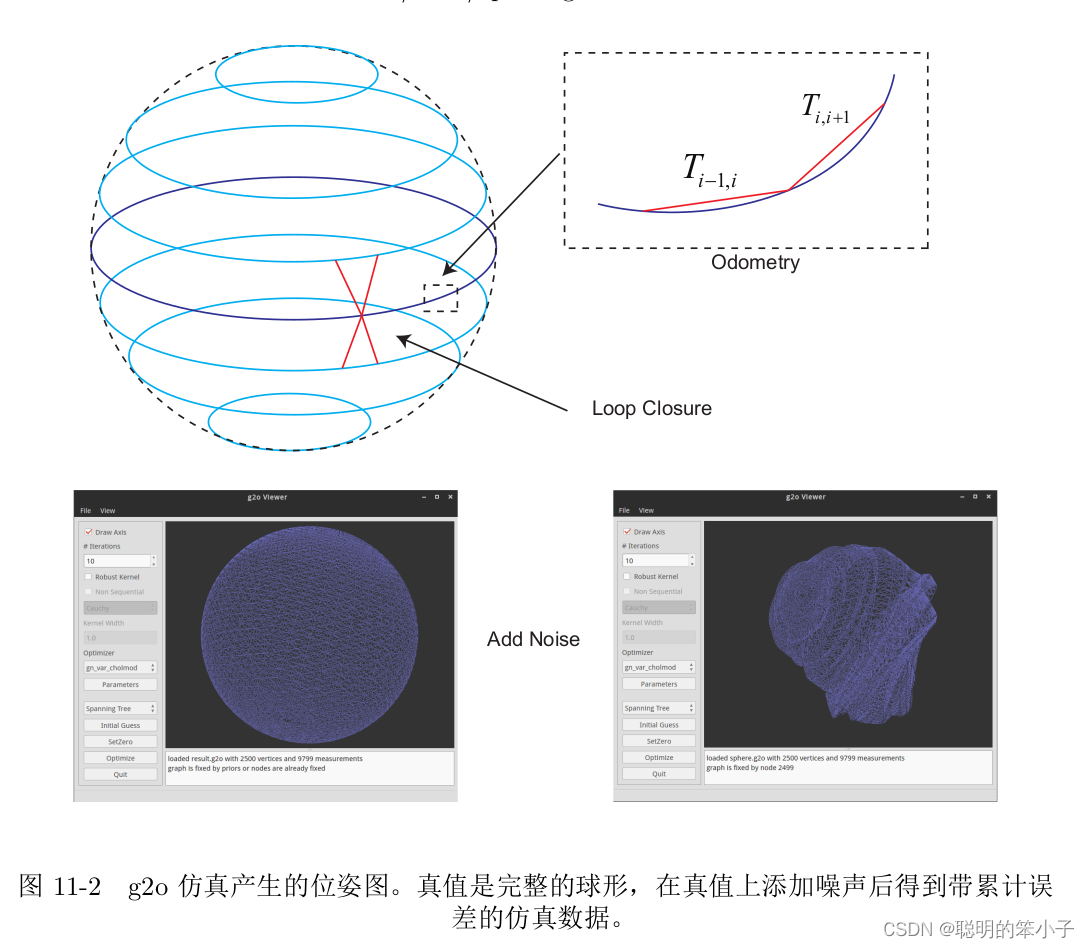
这里给了一个带噪声的球形位姿图,使用g2o_viewer查看如下左图所示,是由g2o的create sphere函数创造的。而经过Pose Graph优化后的结果就左图所示。
位姿图优化的代码使用了g2o库自带的SE3和自己定义的SE3来实现。因为g2o自带的默认旋转向量以四元数的形式表示。代码分别如下:
#include <iostream>
#include <fstream>
#include <string>
#include <g2o/types/slam3d/types_slam3d.h>
#include <g2o/core/block_solver.h>
#include <g2o/core/optimization_algorithm_levenberg.h>
#include <g2o/core/optimization_algorithm_gauss_newton.h>
#include <g2o/solvers/dense/linear_solver_dense.h>
#include <g2o/solvers/cholmod/linear_solver_cholmod.h>
using namespace std;
/************************************************
* 本程序演示如何用g2o solver进行位姿图优化
* sphere.g2o是人工生成的一个Pose graph,我们来优化它。
* 尽管可以直接通过load函数 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1670
1670

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









