






 文章详细描述了在STM32F10x平台上使用I2C接口与MPU6050传感器通信的过程,包括I2C库函数的使用,如写入和读取寄存器,以及如何通过事件等待避免死循环。还介绍了初始化、设备识别和数据获取的函数实现。
文章详细描述了在STM32F10x平台上使用I2C接口与MPU6050传感器通信的过程,包括I2C库函数的使用,如写入和读取寄存器,以及如何通过事件等待避免死循环。还介绍了初始化、设备识别和数据获取的函数实现。
硬件配置IIC就是使用IIC的库函数
#include "stm32f10x.h" // Device header
#include "MPU6050_Reg.h"
#define MPU6050_ADDRESS 0xD0
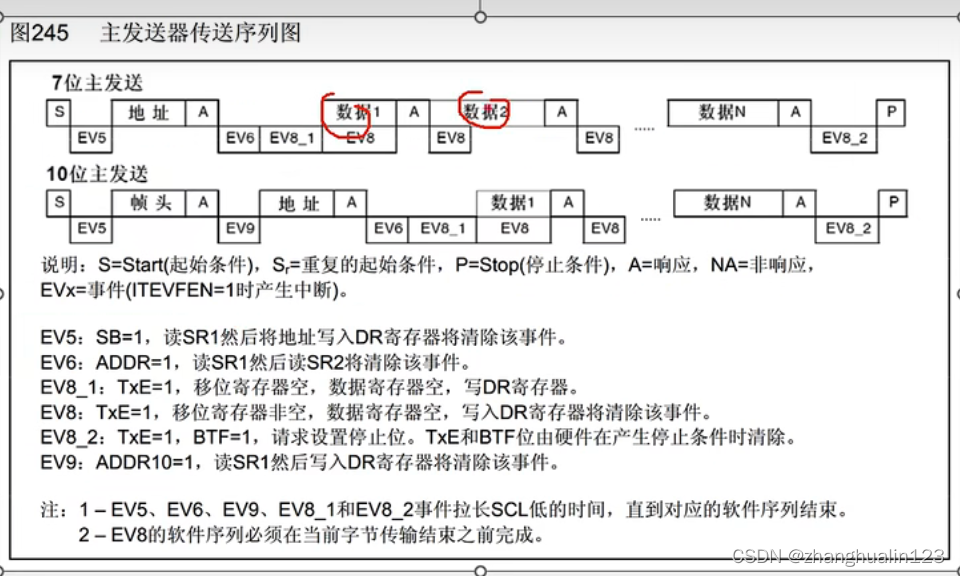
void MPU6050_WaitEvent(I2C_TypeDef* I2Cx, uint32_t I2C_EVENT) 为了跳出死循环防止程序卡死
{
uint32_t Time_out;
Time_out=10000;
while(I2C_CheckEvent(I2Cx, I2C_EVENT)!=SUCCESS) //为了确保波形,EV5事件发生
{
Time_out--;
if(Time_out == 0)
break;
}
}
void MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data)
{
I2C_GenerateSTART(I2C2, ENABLE);
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT); //为了确保波形,EV5事件发生
I2C_Send7bitAddress(I2C2, MPU6050_ADDRESS, I2C_Direction_Transmitter); //发送从机地址,库函数自带应答位
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED);
/*while(I2C_CheckEvent(I2C2, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED)!=SUCCESS);留一个做对比*/
I2C_SendData(I2C2,RegAddress);
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTING);
I2C_SendData(I2C2,Data);
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTED);
I2C_GenerateSTOP(I2C2,ENABLE);
}
uint8_t MPU6050_ReadReg(uint8_t RegAddress)
{
uint8_t data;
I2C_GenerateSTART(I2C2, ENABLE);
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT);//为了确保波形,EV5事件发生
I2C_Send7bitAddress(I2C2, MPU6050_ADDRESS, I2C_Direction_Transmitter); //发送从机地址,库函数自带应答位
MPU6050_WaitEvent(I2C2,I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED);
I2C_SendData(I2C2,RegAddress);
MPU6050_WaitEvent(I2C2,I2C_EVENT_MASTER_BYTE_TRANSMITTED);
I2C_GenerateSTART(I2C2, ENABLE);//在来个起始条件
MPU6050_WaitEvent(I2C2,I2C_EVENT_MASTER_MODE_SELECT);
I2C_Send7bitAddress(I2C2, MPU6050_ADDRESS, I2C_Direction_Receiver);
MPU6050_WaitEvent(I2C2,I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED);
/**读取一个字节*/
I2C_AcknowledgeConfig(I2C2, DISABLE); //设置ACK=0,不给应答
I2C_GenerateSTOP(I2C2, ENABLE);
MPU6050_WaitEvent(I2C2,I2C_EVENT_MASTER_BYTE_RECEIVED);//EV7数据产生后,一个字节的数据就已经在DR里面了,下面只需读取
data = I2C_ReceiveData(I2C2);
I2C_AcknowledgeConfig(I2C2, ENABLE); //方便收多个字节
return data;
}
void MPU6050_Init(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_I2C2, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
/*初始化GPIO*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10 | GPIO_Pin_11;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
/*初始化I2C*/
I2C_InitTypeDef I2C_InitStruct;
I2C_InitStruct.I2C_Ack = I2C_Ack_Enable;
I2C_InitStruct.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;
I2C_InitStruct.I2C_ClockSpeed = 50000;
I2C_InitStruct.I2C_DutyCycle = I2C_DutyCycle_2;
I2C_InitStruct.I2C_Mode = I2C_Mode_I2C;
I2C_InitStruct.I2C_OwnAddress1 = 0x00;
I2C_Init(I2C2, &I2C_InitStruct);
I2C_Cmd(I2C2, ENABLE);
MPU6050_WriteReg(MPU6050_PWR_MGMT_1, 0x01);
MPU6050_WriteReg(MPU6050_PWR_MGMT_2, 0x00);
MPU6050_WriteReg(MPU6050_SMPLRT_DIV, 0x09);
MPU6050_WriteReg(MPU6050_CONFIG, 0x06);
MPU6050_WriteReg(MPU6050_GYRO_CONFIG, 0x18);
MPU6050_WriteReg(MPU6050_ACCEL_CONFIG, 0x18);
}
uint8_t MPU6050_GetID(void)
{
return MPU6050_ReadReg(MPU6050_WHO_AM_I);
}
void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ,
int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ)
{
uint8_t DataH, DataL;
DataH = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_H);
DataL = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_L);
*AccX = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_H);
DataL = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_L);
*AccY = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_H);
DataL = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_L);
*AccZ = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_GYRO_XOUT_H);
DataL = MPU6050_ReadReg(MPU6050_GYRO_XOUT_L);
*GyroX = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_GYRO_YOUT_H);
DataL = MPU6050_ReadReg(MPU6050_GYRO_YOUT_L);
*GyroY = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_H);
DataL = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_L);
*GyroZ = (DataH << 8) | DataL;
}
这里要注意到事件的产生,接收数据和发送数据已经自带了应答位,所以自己需要注意事件的产生。
跳出死循环的函数可以做成一个封装。

















 2874
2874

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









