




 本文详细介绍了如何使用STM32F407通过RS485实现两块芯片间的通信。通过配置DMA和中断,节点1周期性发送数据帧,节点2接收到数据后通过DMA回传应用数据。在中断服务函数中,处理发送完成和接收完成的逻辑,确保数据帧的完整传输。在调试过程中解决了数据帧丢失问题。
本文详细介绍了如何使用STM32F407通过RS485实现两块芯片间的通信。通过配置DMA和中断,节点1周期性发送数据帧,节点2接收到数据后通过DMA回传应用数据。在中断服务函数中,处理发送完成和接收完成的逻辑,确保数据帧的完整传输。在调试过程中解决了数据帧丢失问题。
功能介绍
本文主要是发送端的内容。
想实现2块STM32F407的芯片之间通过RS485来实现高效的通信方式。
两块板子,一个为节点1,另一个为节点2;
节点1,先发起双方之间的通信,在任务函数中,每间隔一段时间比如100毫秒,发送一帧固定长度的数据给节点2;节点2在等待节点1的数据帧的到来,节点2在接收完一帧数据后,将自己的一些应用数据封装成一帧数据,再通过DMA的方式经过串口将一帧数据发送给节点1。
节点2接收一帧数据后,在任务函数中进行对数据的解析及处理。
节点1,使用的串口为USART3,下面是串口和DMA的初始化代码:
// 使能USART3和DMA1时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_DMA1,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3,ENABLE);
//配置USART3的GPIO
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10 | GPIO_Pin_11;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOB,&GPIO_InitStructure);
// RS485 收发模式控制
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_15;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOE,&GPIO_InitStructure);
//将USART3的GPIO引脚与AF模式映射起来
GPIO_PinAFConfig(GPIOB, GPIO_PinSource10, GPIO_AF_USART3);
GPIO_PinAFConfig(GPIOB, GPIO_PinSource11, GPIO_AF_USART3);
//配置USART3的参数
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = 115200;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Tx|USART_Mode_Rx;
USART_Init(USART3, &USART_InitStructure);
// 配置USART2的中断
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = USART3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
// 使能USART2的中断
USART_ITConfig(USART3, USART_IT_RXNE, ENABLE);
USART_Cmd(USART3, ENABLE);
// 配置DMA1的参数 发送数据流
DMA_InitTypeDef DMA_InitStructure;
DMA_InitStructure.DMA_Channel = DMA_Channel_4;
DMA_InitStructure.DMA_PeripheralBaseAddr = (uint32_t)&(USART3->DR);
DMA_InitStructure.DMA_Memory0BaseAddr = (uint32_t)tx_buffer;
DMA_InitStructure.DMA_DIR = DMA_DIR_MemoryToPeripheral;
DMA_InitStructure.DMA_BufferSize = TX_BUFFER_SIZE;
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte;
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_Byte;
DMA_InitStructure.DMA_Mode = DMA_Mode_Normal; // DMA_Mode_Circular DMA_Mode_Normal
DMA_InitStructure.DMA_Priority = DMA_Priority_High;
DMA_InitStructure.DMA_FIFOMode = DMA_FIFOMode_Disable;
DMA_InitStructure.DMA_FIFOThreshold = DMA_FIFOThreshold_Full;
DMA_InitStructure.DMA_MemoryBurst = DMA_MemoryBurst_Single;
DMA_InitStructure.DMA_PeripheralBurst = DMA_PeripheralBurst_Single;
DMA_Init(DMA1_Stream3, &DMA_InitStructure);
// 设置DMA的发送完成中断
NVIC_InitStructure.NVIC_IRQChannel = DMA1_Stream3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
DMA_ITConfig(DMA1_Stream3, DMA_IT_TC, ENABLE);
NVIC_EnableIRQ(DMA1_Stream3_IRQn);
// 配置DMA1的参数 接收数据流
DMA_InitStructure.DMA_Channel = DMA_Channel_4;
DMA_InitStructure.DMA_PeripheralBaseAddr = (uint32_t) & (USART3->DR);
DMA_InitStructure.DMA_Memory0BaseAddr = (uint32_t) rx_buffer;
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralToMemory;
DMA_InitStructure.DMA_BufferSize = RX_BUFFER_SIZE;
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte;
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_Byte;
DMA_InitStructure.DMA_Mode = DMA_Mode_Normal; // DMA_Mode_Normal DMA_Mode_Circular
DMA_InitStructure.DMA_Priority = DMA_Priority_VeryHigh;
DMA_InitStructure.DMA_FIFOMode = DMA_FIFOMode_Disable;
DMA_InitStructure.DMA_FIFOThreshold = DMA_FIFOThreshold_Full;
DMA_InitStructure.DMA_MemoryBurst = DMA_MemoryBurst_Single;
DMA_InitStructure.DMA_PeripheralBurst = DMA_PeripheralBurst_Single;
DMA_Init(DMA1_Stream1, &DMA_InitStructure);
// 设置DMA的接收完成中断 可以判断一帧数据的接收完成
NVIC_InitStructure.NVIC_IRQChannel = DMA1_Stream1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
DMA_ITConfig(DMA1_Stream1, DMA_IT_TC, ENABLE);
NVIC_EnableIRQ(DMA1_Stream1_IRQn);
//启动DMA1 先关闭哦
DMA_Cmd(DMA1_Stream3, DISABLE); // 发送
DMA_Cmd(DMA1_Stream1, DISABLE); // 接收
//启动USART3
USART_Cmd(USART3, ENABLE);
USART_DMACmd(USART3,USART_DMAReq_Tx,ENABLE); //使能串口1的DMA发送
USART_DMACmd(USART3,USART_DMAReq_Rx,ENABLE); //使能串口1的DMA接收
// 默认是发送模式
PEout(15) = 1; //开启发送模式
}
初始化好需要用到的硬件GPIO USART3 DMA后,在操作系统的任务函数中,我们就可以进行数据的发送了,下面是任务函数中的发送数据的相关参考代码:
void send_task(void)
{
u16 vCrc = 0;
// 封装需要发送的数据帧,
// 这里发送了11个字节的数据
tx_buffer[0] =0x11;
tx_buffer[1] =0x22;
tx_buffer[2] =0x33;
tx_buffer[3] =0x44;
tx_buffer[4] =0x55;
tx_buffer[5] =0x66;
tx_buffer[6] =0x77;
tx_buffer[7] =0x88;
tx_buffer[8] =0x99;
#if 0
tx_buffer[9] =0xAA;
tx_buffer[10] =0xBB;
#endif
vCrc = usMBCRC16( (u8 *)tx_buffer, 9 );
tx_buffer[9] = vCrc >> 8;
tx_buffer[10] = vCrc;
// 切换RS485为发送模式
PEout(15)= 1; //开启发送模式
DMA_Cmd(DMA1_Stream3, DISABLE);
while (DMA_GetCmdStatus(DMA1_Stream3) != DISABLE);
DMA_SetCurrDataCounter(DMA1_Stream3, TX_BUFFER_SIZE);
DMA_Cmd(DMA1_Stream3, ENABLE);
// 等待接收数据帧的到来
if(1==Frame_Recv_Flag)
{
// 解析接收数据帧
}
}
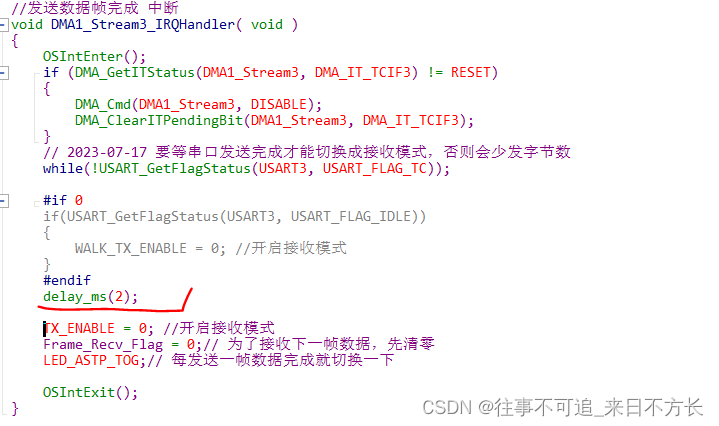
节点1,发送一帧数据后,我们需要知道什么时候发送完成 数据的发送,然后切换RS485的收发模式,为接收数据帧做准备。在这里我使能了DMA的传输完成的中断。在中断服务函数中,除了清除标志位就是切换RS485的收发模式,最好在这里做个LED翻转,可以提示我们一帧数据发送出去了。下面是部分参考代码:
void DMA1_Stream3_IRQHandler( void )
{
OSIntEnter();
if (DMA_GetITStatus(DMA1_Stream3, DMA_IT_TCIF3) != RESET)
{
DMA_Cmd(DMA1_Stream3, DISABLE);
DMA_ClearITPendingBit(DMA1_Stream3, DMA_IT_TCIF3);
}
// 在这里最好加个串口的传输完成的判断,否则有可能发送少几个字节的数据
while(!USART_GetFlagStatus(USART3, USART_FLAG_TC));
// 2023-07-18 当时每次断电重启后,第一帧数据还是少2个字节的数据,后面再发不会少2个字节的数据
// 2023-07-18 在这里适当的延时1到2个ms的时间后去切换485的接收使能好像可以了
delay_ms(1);// 2023-07-18
PEout(15)= 0; //开启接收模式
Frame_Recv_Flag = 0;// 为了接收下一帧数据,先清零
LED_01_TOG;// 每发送一帧数据完成就切换一下
OSIntExit();
}
假设这时候节点2已经接收完节点1发送的数据帧后,做了数据帧的解析后,也发送了一帧数据过来,这时因为节点1使能了串口USART3的接收非零中断,进入中断函数中,参考代码如下:
void USART3_IRQHandler(void)
{// 每进入一次该中断,就打开一下DMA的接收数据流
OSIntEnter();
if (USART_GetITStatus(USART3, USART_IT_RXNE) != RESET)
{
USART_ClearITPendingBit(USART3, USART_IT_RXNE);
DMA_Cmd(DMA1_Stream1, DISABLE);
DMA_SetCurrDataCounter(DMA1_Stream1, RX_BUFFER_SIZE);
DMA_Cmd(DMA1_Stream1, ENABLE);
}
//LED_01_TOG;// 每接收一个字节的数据就反转一下
OSIntExit();
}
在这个中断函数中就是进行了中断标志位清零,然后打开DMA,瞬间就进行了数据的拷贝。
当DMA的接收数据流的传输完成中断响应,就标识着一帧数据完成,该中断函数的参考代码如下:
void DMA1_Stream1_IRQHandler( void )
{
OSIntEnter();
if (DMA_GetITStatus(DMA1_Stream1, DMA_IT_TCIF1) != RESET)
{
DMA_ClearITPendingBit(DMA1_Stream1, DMA_IT_TCIF1);
PEout(15) = 1; // 开启RS485发送模式
Frame_Recv_Flag = 1; // 数据帧接收完成 标志位
}
// 接收完数据
LED_02_TOG;// LED_02 串口助手每发一帧数据,灯就会一闪一下
OSIntExit();
}
在中断函数中,进行了中断标志位清零,RS485的模式切换,数据帧接收完成的标志位置1,
在任务函数中,数据帧接收完成标志位置1后,就可以解析数据帧了。
在测试的过程中可以通过观察,LED1和LED2的状态来指示我们一帧数据的发送和接收。
LED1闪烁一下,说明有一帧数据通过串口发送完成。
LED2闪烁一下,说明有一帧数据被串口接收完成。
这里先分析到节点1的发送数据帧和接收数据帧的实现过程,节点2的后续有时间再写了啊!
记录一下调试过程中出现的问题的图片记录:
1.出现第一帧少2个字节的情况:

2.修改DMA接收完成中断的内容:
3.DMA中断函数中添加适当延时后串口监视到的数据


















 773
773



 到【灌水乐园】发言
到【灌水乐园】发言








