




为什么 死区 tdead = [(最大的关断延迟时间− 最小的开通延迟时间 )+ (最大的驱动信号传递延迟时间− 最小的驱动信号传递延迟时间 )]×1.2?
这个公式非常专业,它描述的是在电力电子变换器(如逆变器)中,设置死区时间 的一种经典且严谨的计算方法。
这个公式的核心思想是:死区时间必须覆盖所有可能的时间不确定性,以确保上下两个开关管绝不会发生“直通”(短路)。
下面我们来一步步拆解这个公式,并解释为什么最后要乘以1.2。
公式拆解:tdead = [(最大的关断延迟时间 − 最小的开通延迟时间 ) + (最大的驱动信号传递延迟时间 − 最小的驱动信号传递延迟时间 )] × 1.2
这个公式可以看作是两个主要部分的和:
第一部分:器件开关延迟的不确定性 (最大的关断延迟时间 − 最小的开通延迟时间)
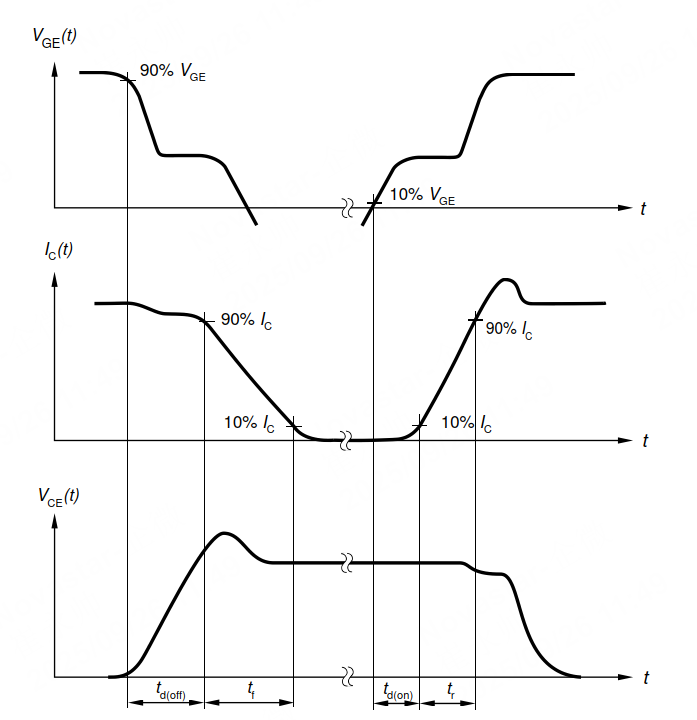
- 关断延迟时间:从驱动芯片发出关断指令,到功率器件(如IGBT、MOSFET)电流下降到90%的这段时间。
- 开通延迟时间:从驱动芯片发出开通指令,到功率器件(如IGBT、MOSFET)电流上升到10%的这段时间。
为什么要用“最大关断延迟”减去“最小开通延迟”?
我们考虑最坏情况:我们希望上管完全关断后,再开启下管。
- 最坏情况:上管的关断过程异常地慢(取最大关断延迟),同时下管的开通过程却异常地快(取最小开通延迟)。
- 在这种情况下,如果死区时间不够长,下管可能会在上管还未完全关断时就提前开通,导致电源正负极直接短路,即“直通”,烧毁器件。
所以,(最大关断延迟 - 最小开通延迟) 计算的是仅由功率器件本身开关特性差异所导致的最坏情况下的时间差。
第二部分:驱动信号传递延迟的不确定性 (最大的驱动信号传递延迟时间 − 最小的驱动信号传递延迟时间)
- 驱动信号传递延迟:从主控制器(如MCU、DSP)发出PWM信号,到驱动芯片接收到并开始执行指令的这段时间。这个延迟主要来自于:
- 信号隔离:光耦或数字隔离器的延迟。
- 驱动芯片内部处理:电平转换、放大等电路的延迟。
- PCB布线差异:通往上下两个管的驱动信号路径长度可能不同。
为什么需要考虑这个差异?
即使两个
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 7305
7305

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











