







 文章介绍了CyberRT中使用共享内存进行消息发布和接收的详细过程,涉及ShmTransmitter、Segment、ConditionNotifier和MulticastNotifier的创建与操作,强调了数据同步与加锁机制,以及Block中的写操作和读操作管理。
文章介绍了CyberRT中使用共享内存进行消息发布和接收的详细过程,涉及ShmTransmitter、Segment、ConditionNotifier和MulticastNotifier的创建与操作,强调了数据同步与加锁机制,以及Block中的写操作和读操作管理。
CyberRT共享内存类图
共享内存消息发布
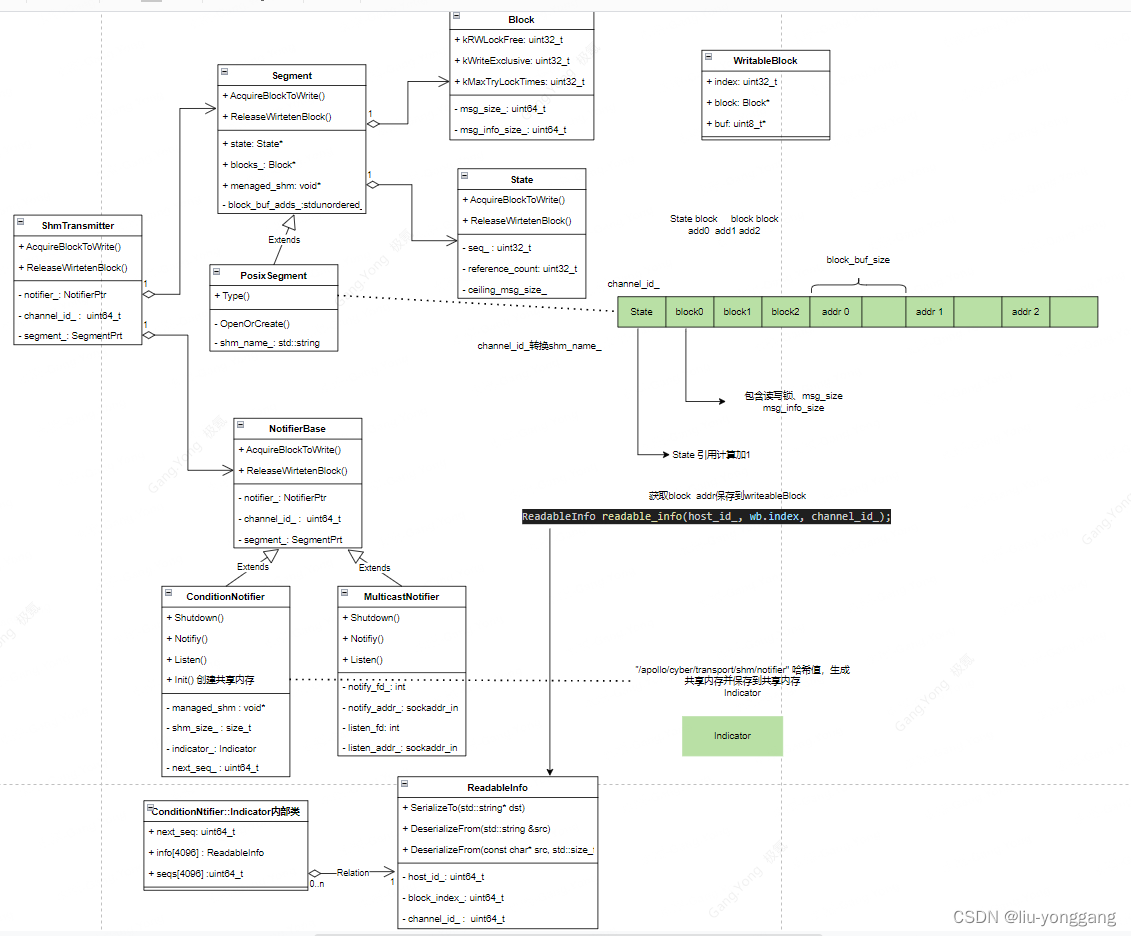
数据用共享内存发布时,首先会创建ShmTransmitter对象,包含两个主要成员segment和notifier,Segment用于创建共享内存(上面绿色部分),Notifer 最终构建ReadableInfo通知给其他进程。
使用哪个ConditionNotifier-> notify或MulticastNotifier->notify,是在创建时根据配置文件决定的。
ConditionNotifier 在构建时会创建Indicator对象保存到共享内存中。
调ConditionNotifier-> notify,实际时将ReadableInfo保存到Indicator对象。
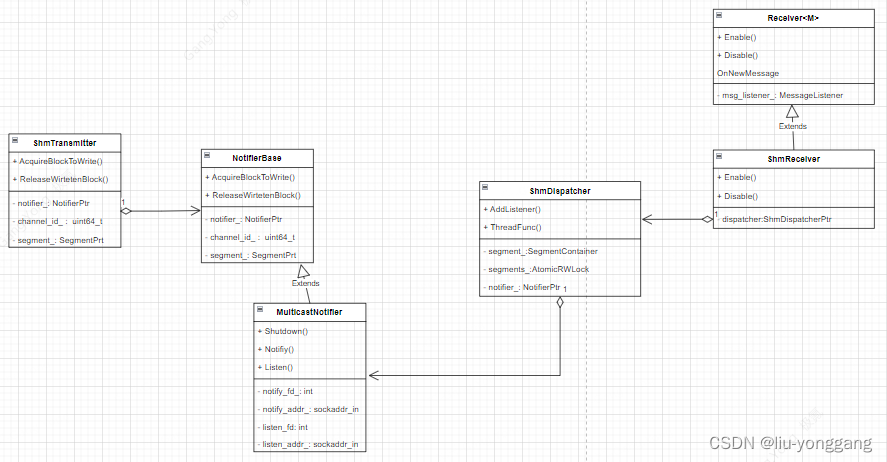
ConditionNotifier 共享内存数据接收

在接收数据时,也会创建同样的共享内存。如果共享内存存在,则直接打开。
在接收端也有同样的共享内存操作ConditionNotifier 。
ShmDispatcher会持有多个通道segment,用std::unordered_map<channelid, segment>表示。
同时启动一个后台线程ThreadFunc 线程轮询处理消息回调。
void ShmDispatcher::ThreadFunc() {
ReadableInfo readable_info;
// 轮询处理
while (!is_shutdown_.load()) {
// 100ms, Listen会转换100000 ms,对比seq,如果不等处理消息。每次轮询会等待递减50ms。
if (!notifier_->Listen(100, &readable_info)) {
ADEBUG << "listen failed.";
continue;
}
if (readable_info.host_id() != host_id_) {
ADEBUG << "shm readable info from other host.";
continue;
}
//从共享内存Indicator中读出的数据
uint64_t channel_id = readable_info.channel_id();
uint32_t block_index = readable_info.block_index();
{
ReadLockGuard<AtomicRWLock> lock(segments_lock_);
if (segments_.count(channel_id) == 0) {
continue;
}
// check block index
// std::unordered_map<uint64_t, uint32_t> previous_indexes_;
// 保存key: channelID, value: block_index
if (previous_indexes_.count(channel_id) == 0) {
previous_indexes_[channel_id] = UINT32_MAX;
}
uint32_t& previous_index = previous_indexes_[channel_id];
if (block_index != 0 && previous_index != UINT32_MAX) {
if (block_index == previous_index) {
ADEBUG << "Receive SAME index " << block_index << " of channel "
<< channel_id;
} else if (block_index < previous_index) {
ADEBUG << "Receive PREVIOUS message. last: " << previous_index
<< ", now: " << block_index;
} else if (block_index - previous_index > 1) {
ADEBUG << "Receive JUMP message. last: " << previous_index
<< ", now: " << block_index;
}
}
previous_index = block_index;
ReadMessage(channel_id, block_index);
}
}
}
MulticastNotifier共享内存数据接收
MulticastNotifier时采用多播socket实现的,默认
std::string mcast_ip("239.255.0.100");
uint16_t mcast_port = 8888;
创建两个socket notify_fd_ 用于发生消息,listen_addr用于接收消息。
在发送端调用Notify时,时调的MulticastNotifier::Nofify(const ReadableInfo& info)
bool MulticastNotifier::Notify(const ReadableInfo& info) {
if (is_shutdown_.load()) {
return false;
}
std::string info_str;
info.SerializeTo(&info_str);
ssize_t nbytes =
sendto(notify_fd_, info_str.c_str(), info_str.size(), 0,
(struct sockaddr*)¬ify_addr_, sizeof(notify_addr_));
return nbytes > 0;
}
接收端用同样的方式轮询
bool MulticastNotifier::Listen(int timeout_ms, ReadableInfo* info) {
if (is_shutdown_.load()) {
return false;
}
if (info == nullptr) {
AERROR << "info nullptr.";
return false;
}
struct pollfd fds;
fds.fd = listen_fd_;
fds.events = POLLIN;
int ready_num = poll(&fds, 1, timeout_ms);
if (ready_num > 0) {
char buf[32] = {0}; // larger than ReadableInfo::kSize
ssize_t nbytes = recvfrom(listen_fd_, buf, 32, 0, nullptr, nullptr);
if (nbytes == -1) {
AERROR << "fail to recvfrom, " << strerror(errno);
return false;
}
return info->DeserializeFrom(buf, nbytes);
} else if (ready_num == 0) {
ADEBUG << "timeout, no readableinfo.";
} else {
if (errno == EINTR) {
AINFO << "poll was interrupted.";
} else {
AERROR << "fail to poll, " << strerror(errno);
}
}
return false;
}
bool Block::TryLockForWrite() {
int32_t rw_lock_free = kRWLockFree;
//lock_num_ == rw_lock_free, kWriteExclusive赋值给lock_num_,返回true
//lock_num_ != rw_lock_free, lock_num_赋值给rw_lock_free,返回false
if (!lock_num_.compare_exchange_weak(rw_lock_free, kWriteExclusive,
std::memory_order_acq_rel,
std::memory_order_relaxed)) {
ADEBUG << "lock num: " << lock_num_.load();
return false;
}
return true;
}
总结
1、CyberRT的共享内存读写都时需要加锁的。
2、每次写数据可以是不连续的block
3、每次当Block.lock_num_= 0:空闲,>0:有读操作, -1 : 写操作。
效率不是高。

















 999
999

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









