










CyberRT 简单概述
一、什么是CyberRT?
CyberRT是一套运行时框架
CyberRT可以看做是操作系统之上的一层"RTOS"。
CyberRT采用携程作为调度的基本单位。
将原有的内核态调度,变为用户态调度。
系统的线程,在CyberRT眼里,可以看做"处理单元CPU"。
CyberRT的简化的架构图,大概是这个样子的。

组成模块:
**消息队列:**提供节点之间发送,接收消息的能力。涉及到消息的发布,订阅,服务发现,消息buffer等重要功能
**任务调度:**提供任务实时调度的能力,保证算法功能模块可以实时的接收并处理消息。
用户开发接口:提供相关接口,将算法模块接入CyberRT的框架之内。
Log+Tool:提供高效的日志打印,cyber_recorder,cyber_monitor等基础工具
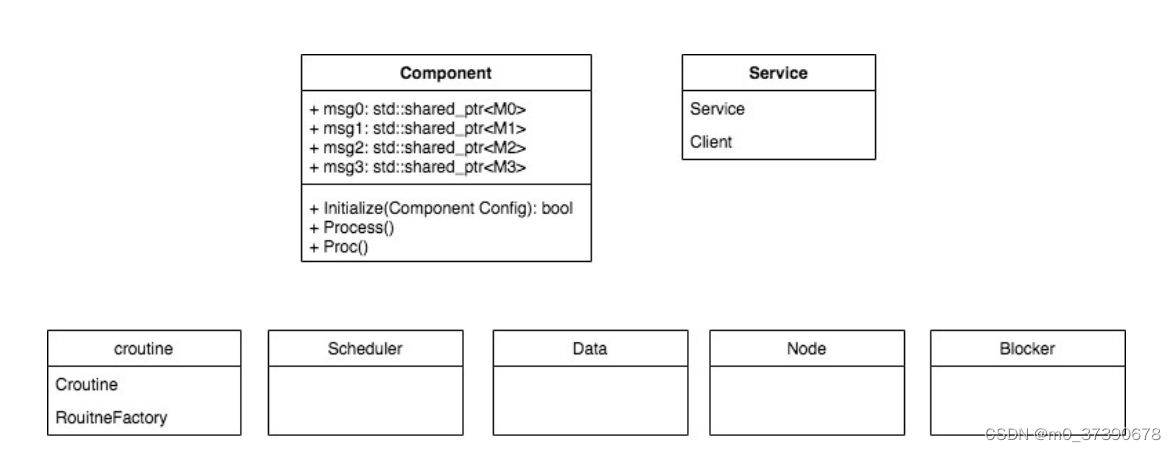
二、CyberRT结构
主要分为3个层级
服务及接口:
Component,Service
数据融合与任务调度:
crontine、Scheduler、Data、Node、Blocker
数据传输与服务发现:
service_discovery,transport


















 318
318

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









