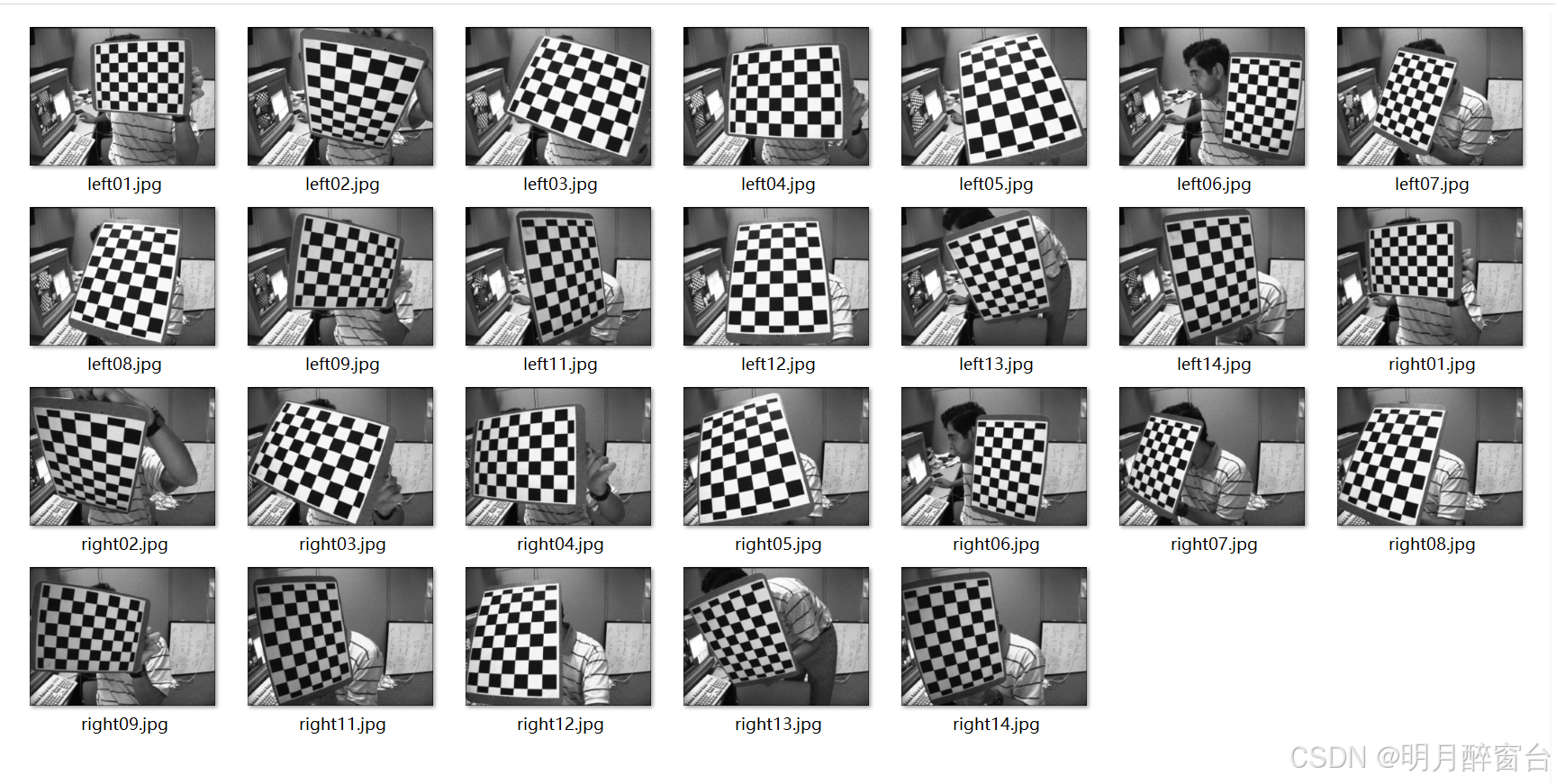
opencv 之双目立体标定算法核心实现 基于双目相机固定视角下采集的棋盘格图像进行内参、外参的标定 实现过程为: 读取棋盘格图像 -> 角点提取 -> 交点坐标精细化 -> 单目标定计算内参和畸变 -> 双目立体标定计算两个相机间的旋转和平移 硬件条件与采集数据 我用的是淘宝上很普通的双目相机,基线、角度都是固定的 在opencv 的安装目录下找到棋盘格图像 chessboard.png 将图像打印到A4纸上,并参考opencv安装目录 (opencv470\sources\samples\data)下采集的棋盘格图像对应的不同位置进行图像采集,数量在13张左右,也可以更多: 代码实现:










 订阅专栏 解锁全文
订阅专栏 解锁全文


















 4733
4733

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








