










相机标定角点提取算法之角点排序
相机标定:常用于单目、双目标定过程
标定原理可参考:
1.相机标定原理:相机成像+单应性变换+相机标定+立体校正
2.单目、双目标定Opencv实现:Opencv例程之双目相机标定
3.双目相机误差估计:三位重建之双目相机误差分析
已知很奇怪Opencv的标定算法中角点提取中排序一直很好,究其原理:
角点分布角度各有不同,它会将n*n个角点呈矩形分布的角点首先进行透视变换,将所有的点映射到一个标准的矩形区域下,然后再对各个角点进行统计排序
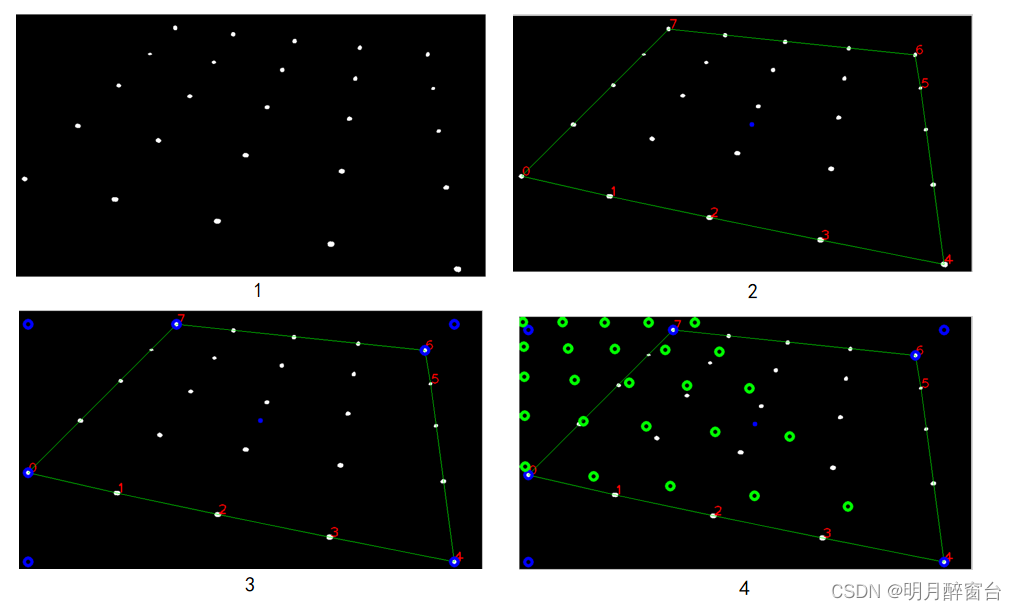
自己生成了一些点,尝试着试了一下效果,图1是角点的来南通与,图2是包含所有点的凸包,我首先想先通过凸包找出所有角点区域的四个端点,然后对这四个点进行透视变换,当然

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 2060
2060

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











