







目录
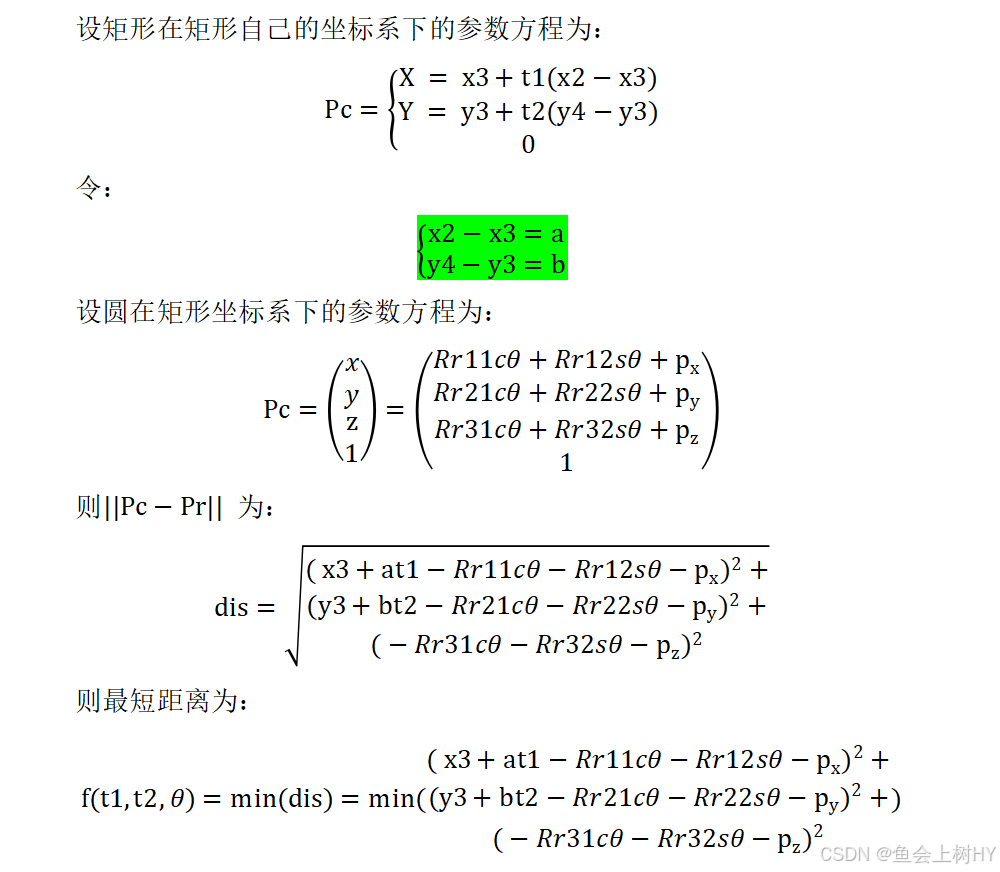
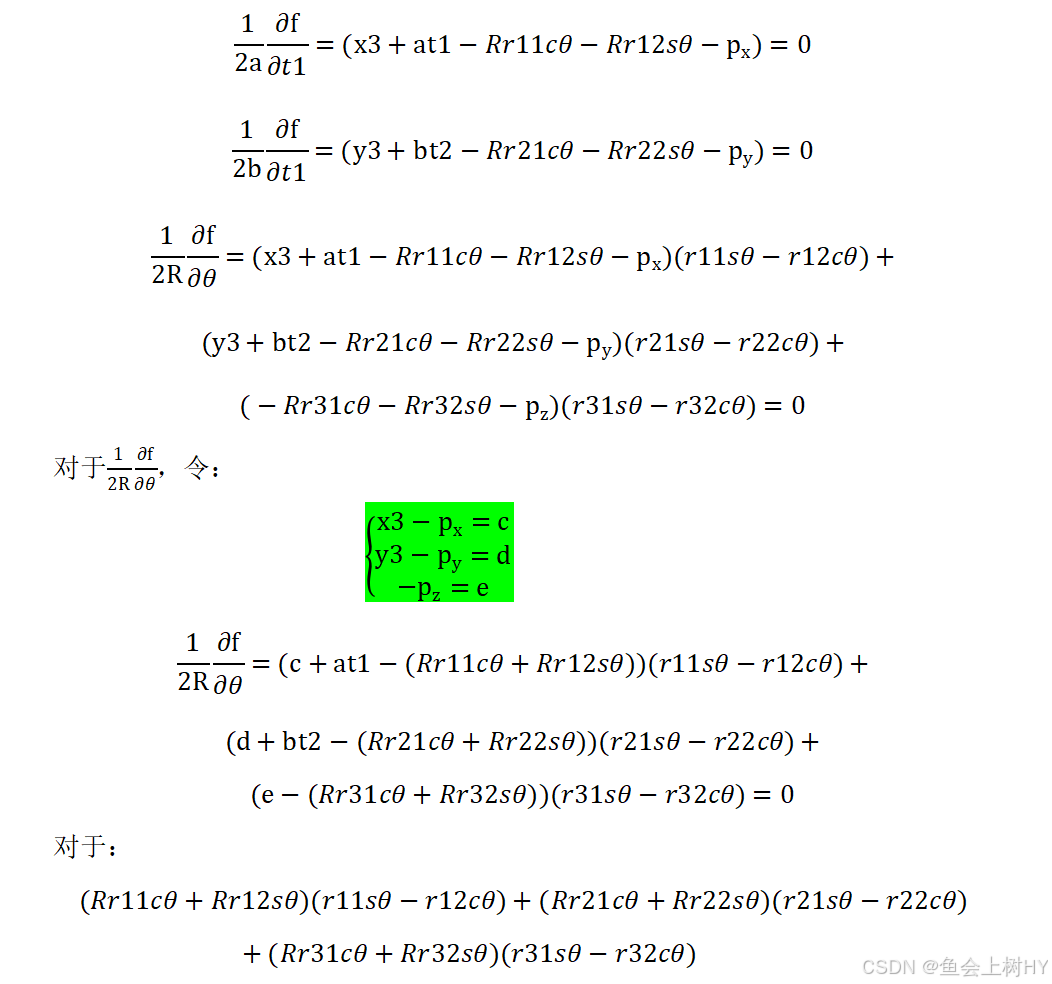
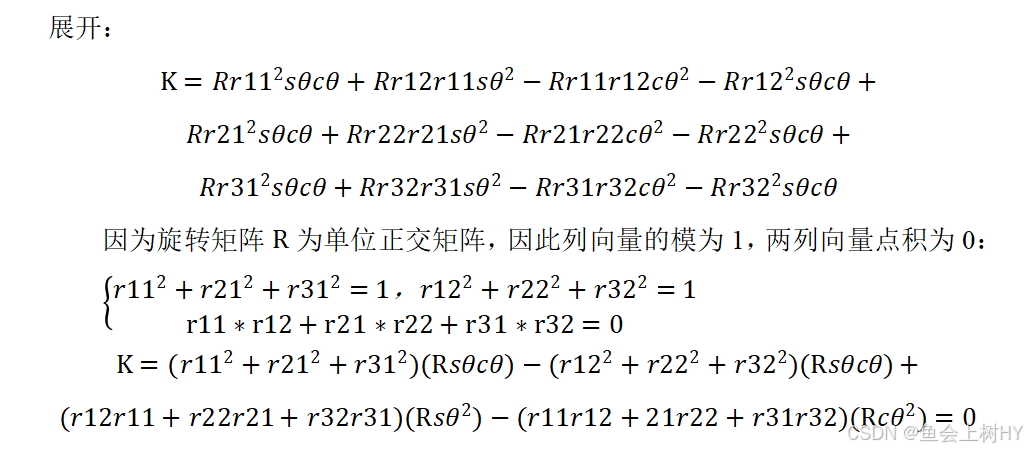
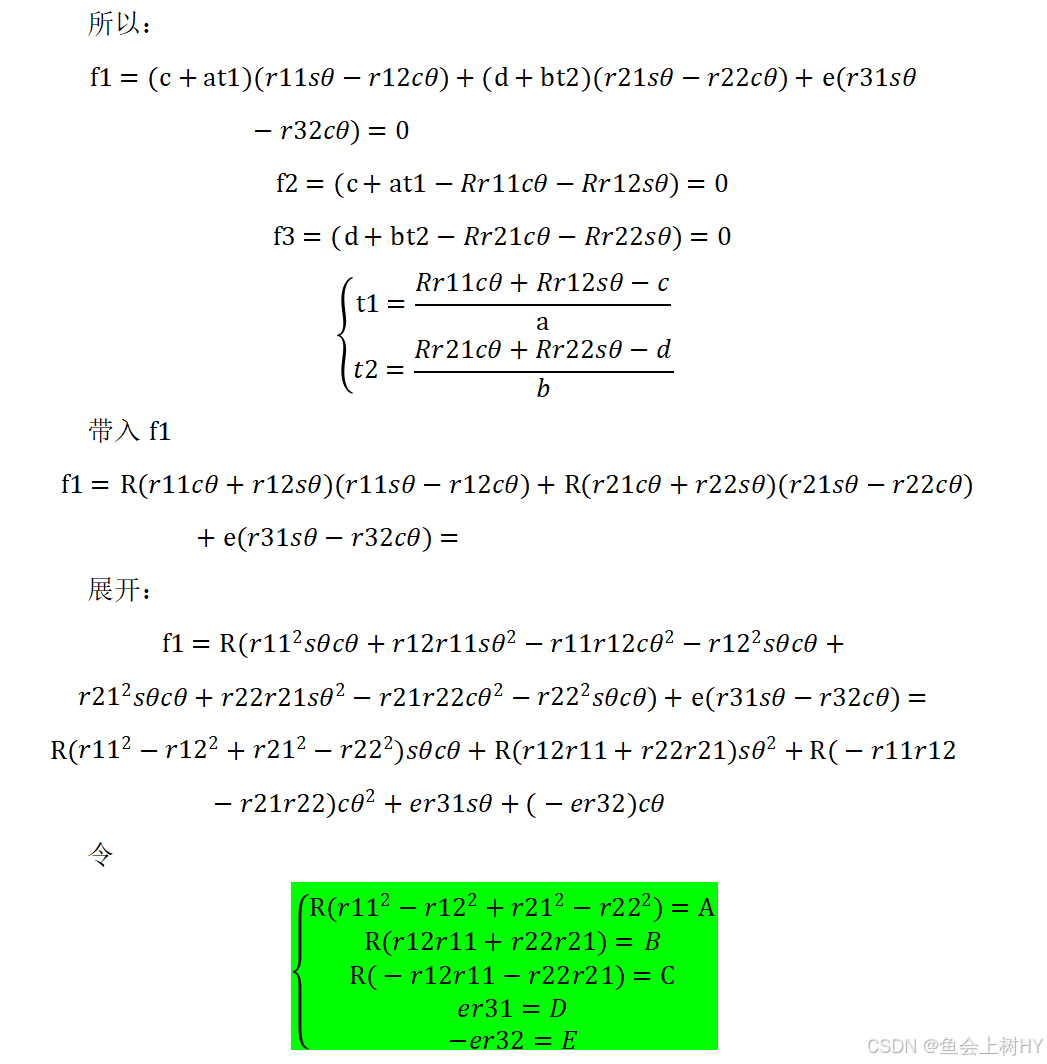
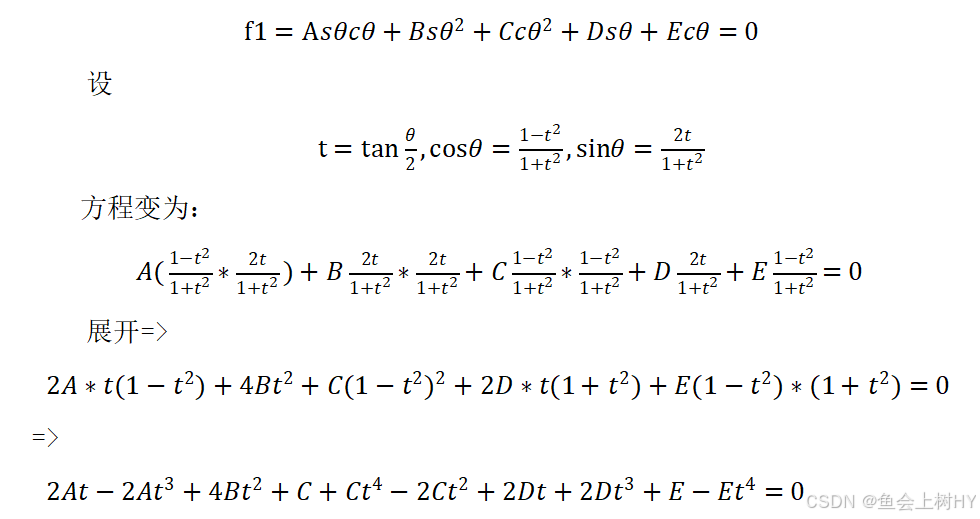
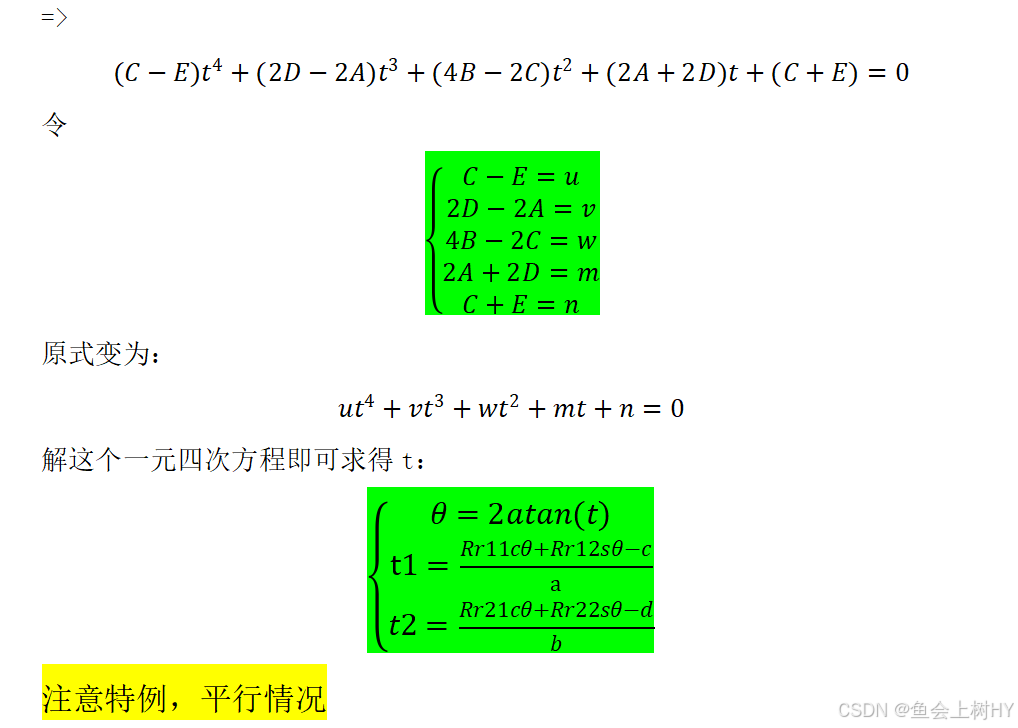
理论推导
matlab代码
function [dmin] = YS_distanceCircleToPlane(length,width,R,Tc1)
% input
% length 矩形的长
% width 矩形的宽
% R 圆的半径
% Tc1 圆心基于矩形第三象限为原点的坐标变换
% output
% dis 最短距离
dmin = 10000;
P1 = [length,width,0];
P2 = [length,0,0];
P3 = [0,0,0];
P4 = [0,width,0];
rect = [length,width,0;
length,0,0;
0,0,0;
0,width,0
];
% 先考虑平行情况
if(abs(abs(Tc1(3,3))-1)<1e-8)
dmin = abs(Tc1(3,4));
return;
end
a = P2(1)-P3(1);
b = P4(2)-P3(2);
c = P3(1)- Tc1(1,4);
d = P3(2)- Tc1(2,4);
e = -Tc1(3,4);
A = R*(Tc1(1,1)^2+Tc1(2,1)^2-Tc1(1,2)^2-Tc1(2,2)^2);
B = R*(Tc1(1,2)*Tc1(1,1)+Tc1(2,2)*Tc1(2,1));
C = -R*(Tc1(1,2)*Tc1(1,1)+Tc1(2,2)*Tc1(2,1));
D = e*Tc1(3,1);
E = -e*Tc1(3,2);
u = C-E;
v = 2*D-2*A;
w = 4*B-2*C;
g = 2*A+2*D;
h = C+E;
% [u,v,w,g,h]
if(abs(u)<=1e-8)
u = 1e-8;
end
if(abs(v)<=1e-8)
v = 1e-8;
end
if(abs(w)<=1e-8)
w = 1e-8;
end
if(abs(g)<=1e-8)
g = 1e-8;
end
if(abs(h)<=1e-8)
h = 1e-8;
end
if(u == 0&&v==0&&w==0)
root = 0;
i = 1;
else if(u == 0&&v==0)
[root,y,i]= Solve2OrderEquaton([w,g,h]);
else if(u == 0)
[root,y,i]= Solve3OrderEquaton([v,w,g,h]);
else
[root,y,i]= Solve4OrderEquaton([u,v,w,g,h]);
end
end
end
for j=1:i
theta = 2*atan(root(j));
t1 = (R*Tc1(1,1)*cos(theta)+R*Tc1(1,2)*sin(theta)-c)/a;
t2 = (R*Tc1(2,1)*cos(theta)+R*Tc1(2,2)*sin(theta)-d)/b;
dis2 = YS_getSharpPointToCircle(t1,t2,length,width,R,Tc1);
if(dis2<dmin)
dmin = dis2;
end
if(dmin<1e-5)
return
end
if(t1>1)
t1 = 1;
[dmin1,P,Q] = YS_distanceCircleToLine(R,Tc1,[length,width,0],[length,0,0]);
if(dmin1<dmin)
P1 = P;
Q1 = Q;
dmin = dmin1;
end
end
if(t1<0)
t1 = 0;
[dmin1,P,Q] = YS_distanceCircleToLine(R,Tc1,[0,0,0],[0,width,0]);
if(dmin1<dmin)
P1 = P;
Q1 = Q;
dmin = dmin1;
end
end
if(t2>1)
t2=1;
[dmin1,P,Q] = YS_distanceCircleToLine(R,Tc1,[0,width,0],[length,width,0]);
if(dmin1<dmin)
P1 = P;
Q1 = Q;
dmin = dmin1;
end
end
if(t2<0)
t2 = 0;
[dmin1,P,Q] = YS_distanceCircleToLine(R,Tc1,[0,0,0],[length,0,0]);
if(dmin1<dmin)
P1 = P;
Q1 = Q;
dmin = dmin1;
end
end
X = P3(1)+t1*a;
Y = P3(2)+t2*b;
Z = 0;
Rx = R*Tc1(1,1)*cos(theta)+R*Tc1(1,2)*sin(theta)+Tc1(1,4);
Ry = R*Tc1(2,1)*cos(theta)+R*Tc1(2,2)*sin(theta)+Tc1(2,4);
Rz = R*Tc1(3,1)*cos(theta)+R*Tc1(3,2)*sin(theta)+Tc1(3,4);
distance = sqrt((Rx-X)^2+(Ry-Y)^2+(Rz-Z)^2);
if(dmin>distance)
dmin = distance;
Q = [Rx,Ry,Rz];
P = [X,Y,Z];
end
end
end测试代码
length = 100;
width = 100;
r = 50;
R = [1,0,0;
0,1,0;
0,0,1];
P = [21.451052, 20.256481, 24.921350]';
Tc1 =[R,P];
dis1=YS_distanceCircleToPlane(length,width,r,Tc1);


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









