







目录
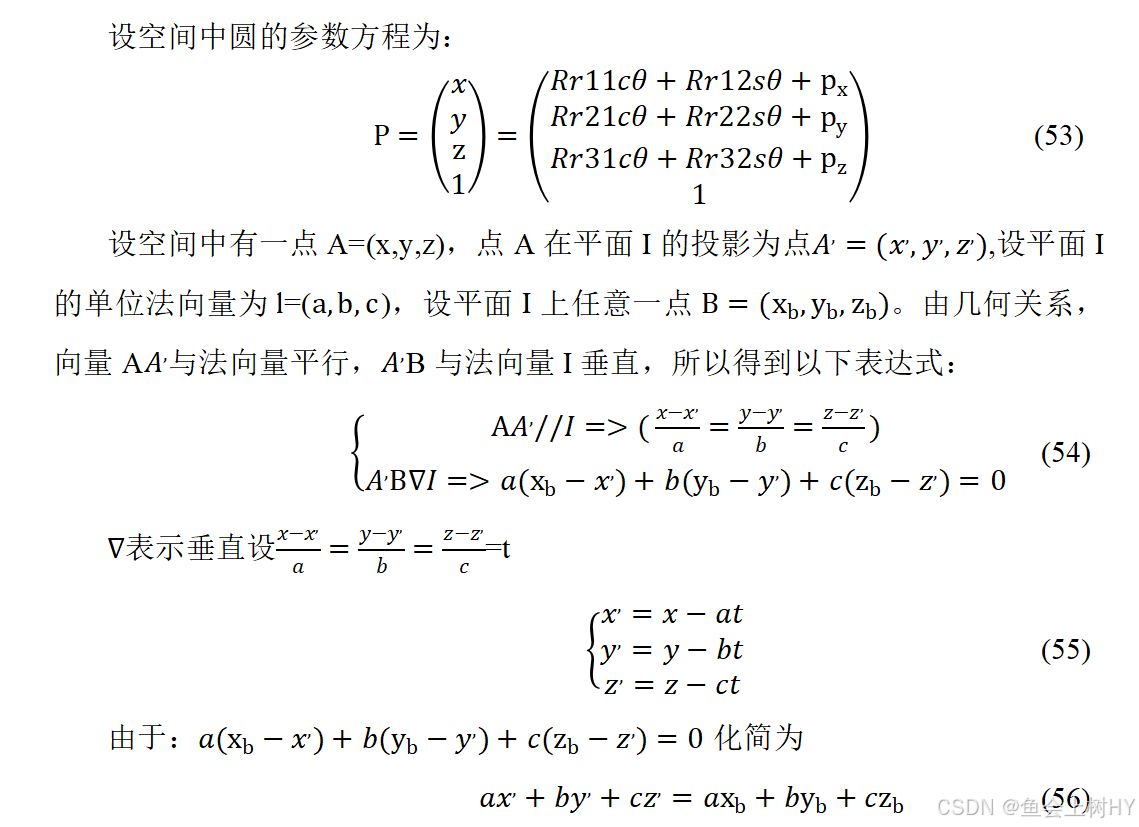
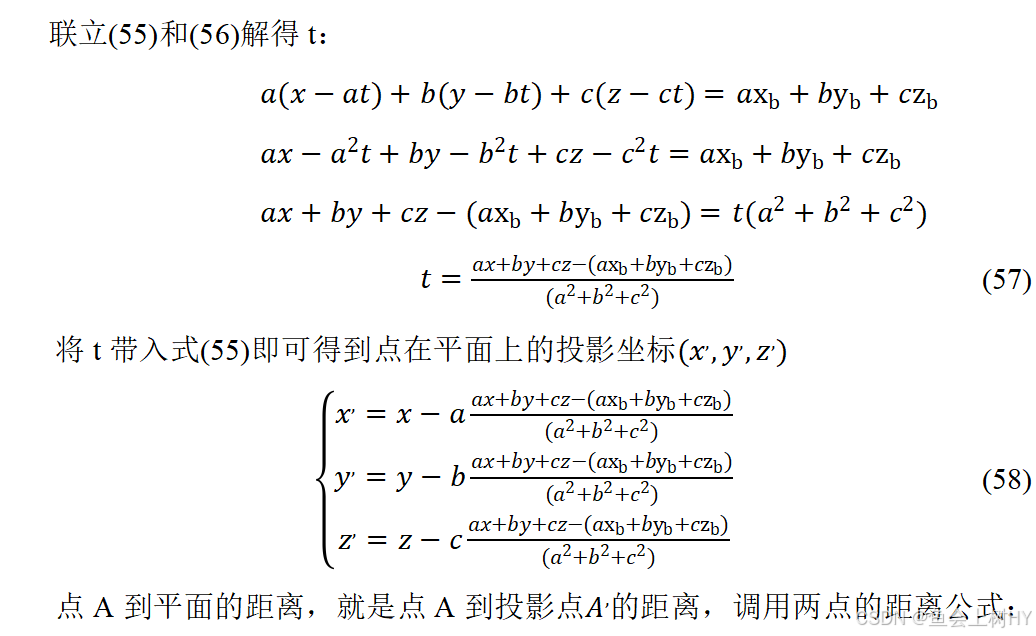
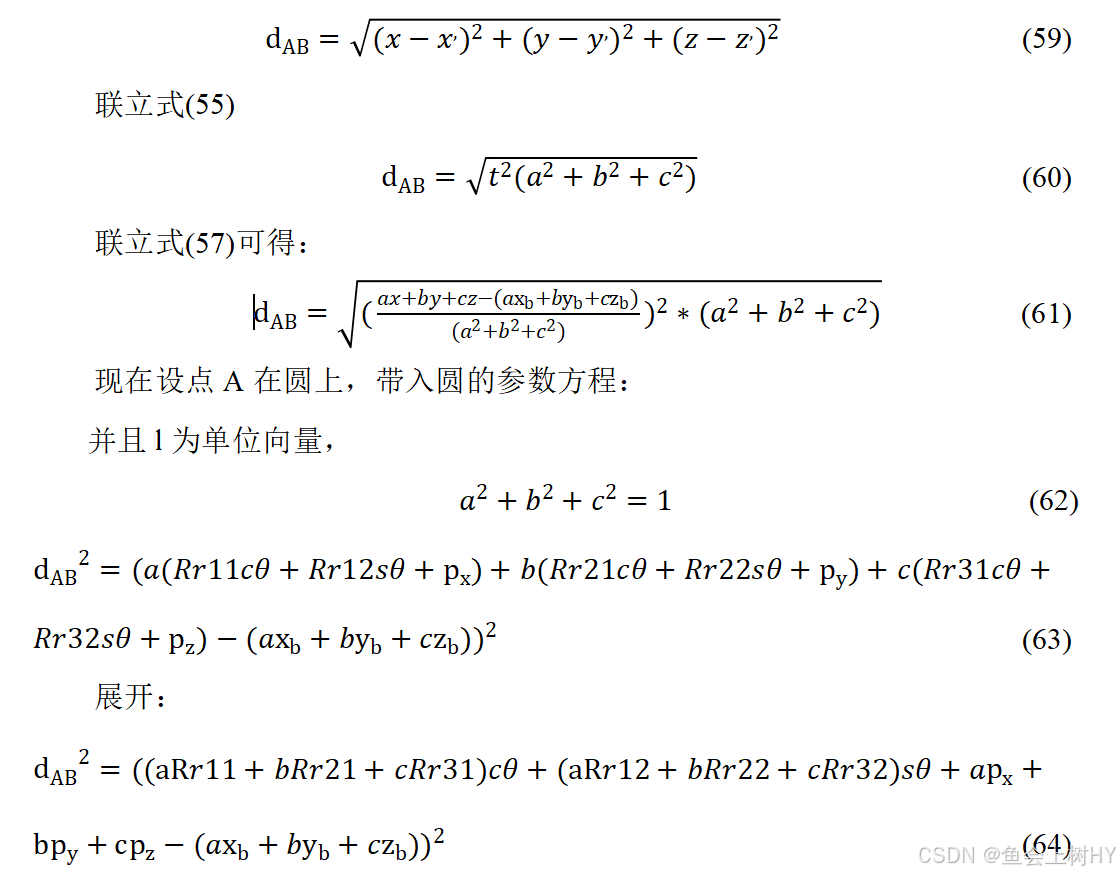
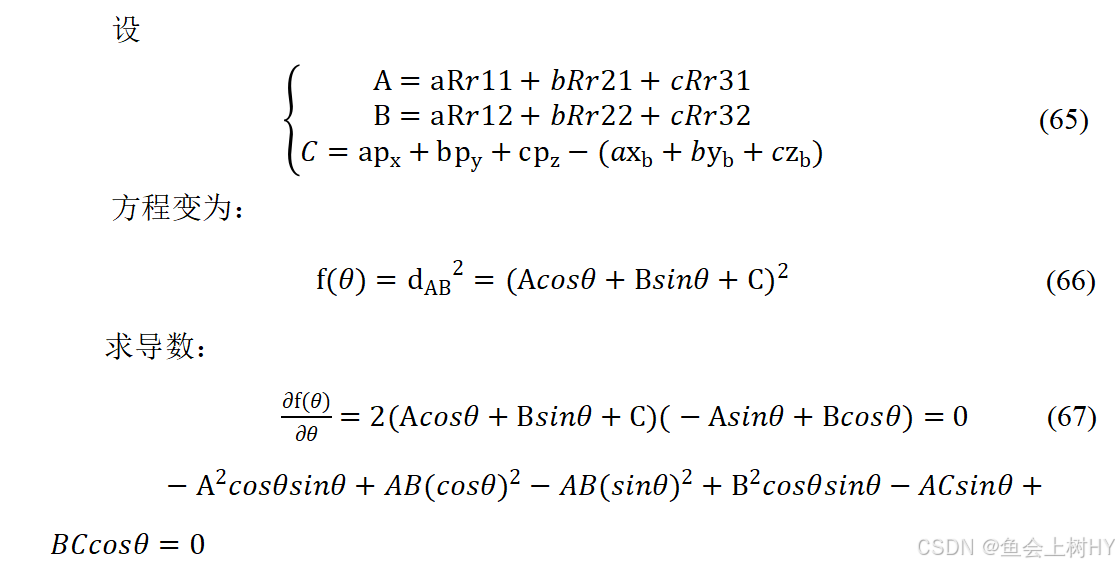
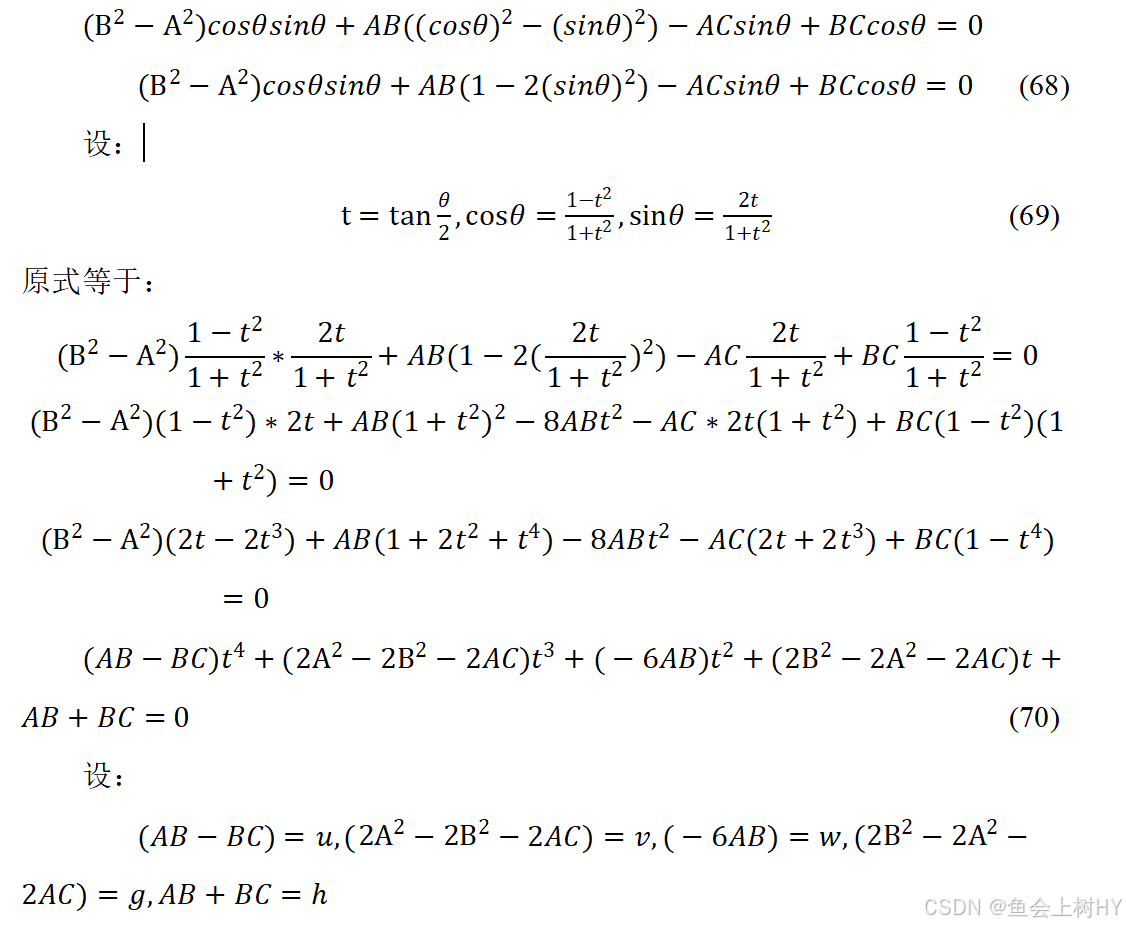
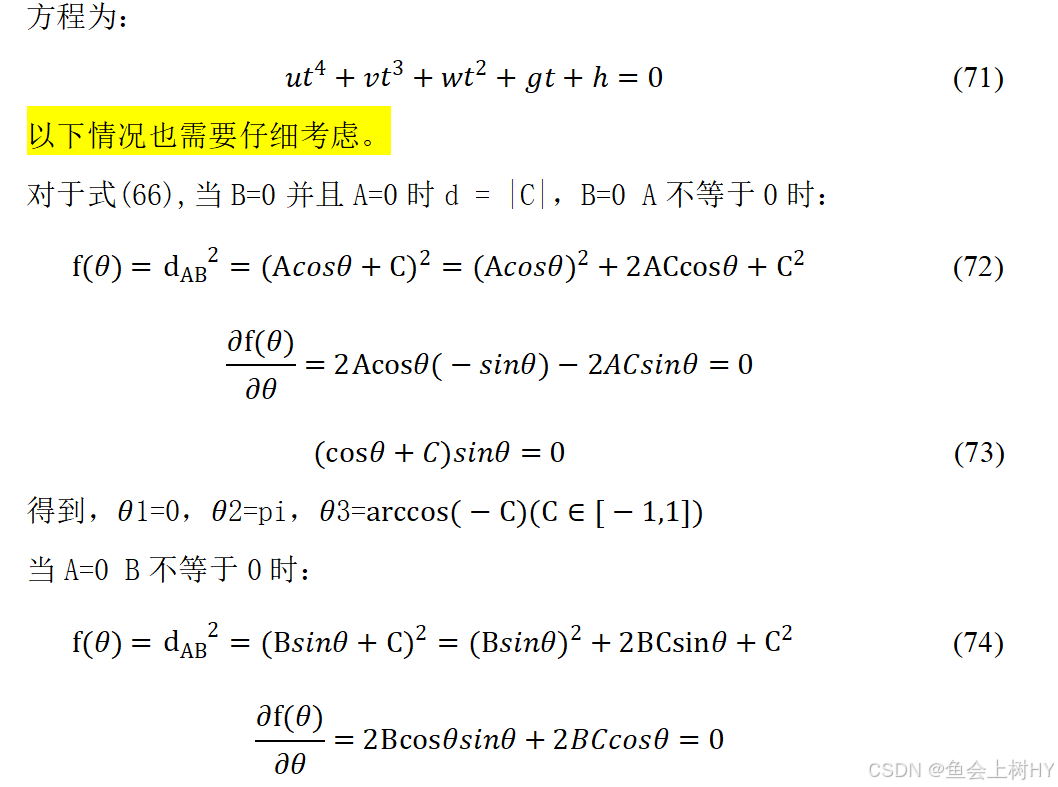
理论公式

matlab代码
function [dis,P,Q,L]=Circle2PlaneDistance(T,R,n,Pn)
% output
% dis 为最短距离,P为距离最短时圆上的点 Q为P对应的投影点 L为最小值有几个
% input
% T为园心到基坐标系的变换矩阵 R为圆半径 n为平面的单位法向量,Pn为平面上一点
d = 1000;
alf = 0;
sym i;
y=0;
P=[];
Q=[];
L = 0;
A = R*(n(1)*T(1,1)+n(2)*T(2,1)+n(3)*T(3,1));
B = R*(n(1)*T(1,2)+n(2)*T(2,2)+n(3)*T(3,2));
C = n(1)*T(1,4)+n(2)*T(2,4)+n(3)*T(3,4)-(n(1)*Pn(1)+n(2)*Pn(2)+n(3)*Pn(3));
if(B==0)
theta(1) = 0;
theta(2) = pi;
i=2;
if(-1<=C&&C<=1)
theta(3) = acos(-C);
i=3;
end
for t=1:i
b = sqrt((A*cos(theta(t))+B*sin(theta(t))+C)^2);
if(b<d)
d=b;
alf = theta(t);
end
if(abs(b) < 1e-8)
alf = theta;
P = [R*T(1,1)*cos(alf)+R*T(1,2)*sin(alf)+T(1,4),R*T(2,1)*cos(alf)+R*T(2,2)*sin(alf)+T(2,4),R*T(3,1)*cos(alf)+R*T(3,2)*sin(alf)+T(3,4)];
tt = n(1)*P(1)+n(2)*P(2)+n(3)*P(3)-(n(1)*Pn(1)+n(2)*Pn(2)+n(3)*Pn(3));
Q = [Q;P(1)-n(1)*tt,P(2)-n(2)*tt,P(3)-n(3)*tt];
L=L+1;
end
end
end
if(A==0)
theta(1) = pi/2;
theta(2) = -pi/2;
i=2;
if(-1<=C&&C<=1)
theta(3) = asin(-C);
i=3;
end
for t=1:i
b = sqrt((A*cos(theta(i))+B*sin(theta(i))+C)^2);
if(b<d)
d=b;
alf = theta(t);
end
if(abs(b) < 1e-8)
alf = theta;
P = [R*T(1,1)*cos(alf)+R*T(1,2)*sin(alf)+T(1,4),R*T(2,1)*cos(alf)+R*T(2,2)*sin(alf)+T(2,4),R*T(3,1)*cos(alf)+R*T(3,2)*sin(alf)+T(3,4)];
tt = n(1)*P(1)+n(2)*P(2)+n(3)*P(3)-(n(1)*Pn(1)+n(2)*Pn(2)+n(3)*Pn(3));
Q = [Q;P(1)-n(1)*tt,P(2)-n(2)*tt,P(3)-n(3)*tt];
L=L+1;
end
end
end
u = A*B-B*C;
v = 2*A*A-2*B*B-2*A*C;
w = -6*A*B;
g = 2*B*B-2*A*A-2*A*C;
h = A*B+B*C;
[u,v,w,g,h];
if(u == 0&&v==0&&w==0)
root = 0;
i = 1;
else if(u == 0&&v==0)
[root,y,i]= Solve2OrderEquaton([v,w,g,h]);
else if(u == 0)
[root,y,i]= Solve3OrderEquaton([v,w,g,h]);
else
[root,y,i] = Solve4OrderEquaton([u,v,w,g,h]);
end
end
end
for t=1:i
theta = 2*atan(root(t));
b = sqrt((A*cos(theta)+B*sin(theta)+C)^2);
if(b<d)
d=b;
alf = theta;
end
if(abs(b) < 1e-8)
alf = theta;
P = [R*T(1,1)*cos(alf)+R*T(1,2)*sin(alf)+T(1,4),R*T(2,1)*cos(alf)+R*T(2,2)*sin(alf)+T(2,4),R*T(3,1)*cos(alf)+R*T(3,2)*sin(alf)+T(3,4)];
tt = n(1)*P(1)+n(2)*P(2)+n(3)*P(3)-(n(1)*Pn(1)+n(2)*Pn(2)+n(3)*Pn(3));
Q = [Q;P(1)-n(1)*tt,P(2)-n(2)*tt,P(3)-n(3)*tt];
L=L+1;
end
end
TB = alf*180/pi;
dis = d;
if(abs(dis) > 1e-8)
P = [R*T(1,1)*cos(alf)+R*T(1,2)*sin(alf)+T(1,4),R*T(2,1)*cos(alf)+R*T(2,2)*sin(alf)+T(2,4),R*T(3,1)*cos(alf)+R*T(3,2)*sin(alf)+T(3,4)];
tt = n(1)*P(1)+n(2)*P(2)+n(3)*P(3)-(n(1)*Pn(1)+n(2)*Pn(2)+n(3)*Pn(3));
Q = [P(1)-n(1)*tt,P(2)-n(2)*tt,P(3)-n(3)*tt];
L=L+1;
end
end
function [root,y,i] = Solve4OrderEquaton(parameter)
a=parameter(2)/parameter(1);
b=parameter(3)/parameter(1);
c=parameter(4)/parameter(1);
d=parameter(5)/parameter(1);
a3=1;
b3=-b;
c3=(a*c-4*d);
d3=-(a^2*d-4*b*d+c^2);
parameter3=[a3,b3,c3,d3];
[root3,y3,i3] = Solve3OrderEquaton(parameter3);
i=0;
root=[];
for j=1:length(root3)
if(a^2/4-b+root3(j)<0||root3(j)^2/4-d<0)
continue;
end
alpha=sqrt(a^2/4-b+root3(j));
beta=sqrt(root3(j)^2/4-d);
if(a*root3(j)/2-c>0)
a21=1;
b21=a/2-alpha;
c21=root3(j)/2-beta;
parameter21=[a21,b21,c21];
[root21,y21,i21] = Solve2OrderEquaton(parameter21);
a22=1;
b22=a/2+alpha;
c22=root3(j)/2+beta;
parameter22=[a22,b22,c22];
[root22,y22,i22] = Solve2OrderEquaton(parameter22);
else
a21=1;
b21=a/2-alpha;
c21=root3(j)/2+beta;
parameter21=[a21,b21,c21];
[root21,y21,i21] = Solve2OrderEquaton(parameter21);
a22=1;
b22=a/2+alpha;
c22=root3(j)/2-beta;
parameter22=[a22,b22,c22];
[root22,y22,i22] = Solve2OrderEquaton(parameter22);
end
root4{j}=[root21,root22];
i4{j}=[i21,i22];
root=[root,root4{j}];
i=i+i21+i22;
break
end
for i_index=length(root):-1:1
for j=i_index-1:-1:1
if(abs(root(i_index)-root(j))<0.00001)
root=root(1:length(root)-1);
i=i-1;
break;
end
end
end
y=root.^4+a*root.^3+b*root.^2+c*root+d;
end
function [root,y,i] = Solve3OrderEquaton(parameter)
a=parameter(1);
b=parameter(2);
c=parameter(3);
d=parameter(4);
a_2=a*a;
a_3=a_2*a;
b_2=b*b;
b_3=b_2*b;
p=c/3/a-b_2/9/a_2;
q=d/2/a+b_3/27/a_3-b*c/6/a_2;
delta=q*q+p^3;
if(delta>0)
i=1;
root=nthroot(-q+sqrt(delta),3)+nthroot(-q-sqrt(delta),3)-b/3/a;
elseif(delta==0)
i=2;
root(1)=-2*nthroot(q,3)-b/3/a;
root(2)=nthroot(q,3)-b/3/a;
else
i=3;
alpha=1/3*acos(-q*sqrt(-p)/p^2);
root(1)=2*sqrt(-p)*cos(alpha)-b/3/a;
root(2)=2*sqrt(-p)*cos(alpha+2/3*pi)-b/3/a;
root(3)=2*sqrt(-p)*cos(alpha+4/3*pi)-b/3/a;
end
y=a*root.^3+b*root.^2+c*root+d;
end
function [root,y,i] = Solve2OrderEquaton(parameter)
a=parameter(1);
b=parameter(2);
c=parameter(3);
delta=b^2-4*a*c;
if(delta>0)
i=2;
root(1)=(-b+sqrt(delta))/2/a;
root(2)=(-b-sqrt(delta))/2/a;
elseif(delta==0)
i=1;
root=-b/2/a;
else
i=0;
root=[];
end
y=a*root.^2+b*root+c;
end
测试代码:
Tc1 = [ -0.5662 0.7741 0.2831 1.0000;
-0.6924 -0.6330 0.3462 1.0000;
0.4472 0 0.8944 1.0000;
0 0 0 1.0000];
R = 3;
n = [0 0 1];
pn = [0 0 0];
[dis,P,Q] = Circle2PlaneDistance(Tc1,R,n,Pn)测试结果:



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









