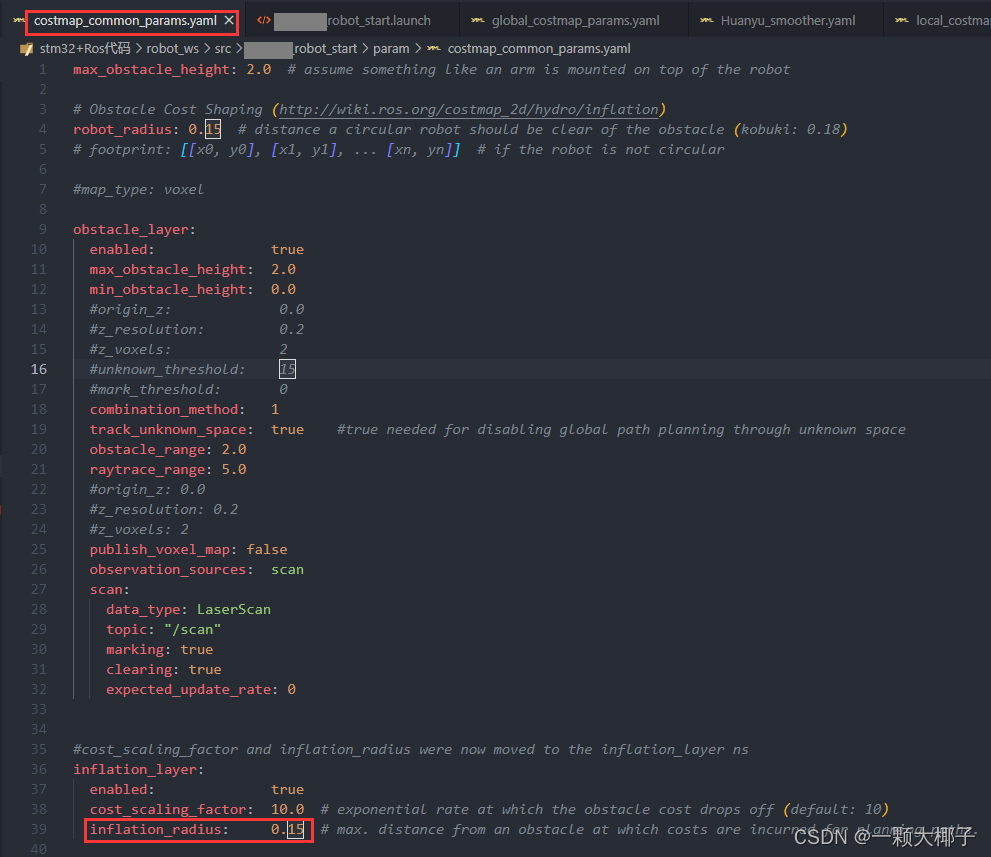
目录 一、原因分析二、解决方法 一、原因分析 从rviz上可以看到全局规划路线已经规划出来,但是小车遇到障碍物后,局部规划路线,需要卡顿很久才能规划出来。因此问题出在局部路线规划上. 二、解决方法 经过分析,发现是在 costmap_common_params.yaml 文件中,小车半径和地图膨胀半径的值不同,导致的。 之前我将 robot_radius 设为了0.20,但是 inflation_radius 还是0.15,可能在局部路径计算的时候会产生错误,需要将 inflation_radius 也改为0.20 注:未经许可请勿转载








 博客探讨了ROS机器人在遇到障碍物时局部规划路线出现延迟的问题,问题根源在于costmap_common_params.yaml配置文件中,robot_radius与inflation_radius设置不一致。解决方案是将inflation_radius调整为与robot_radius相同的值,以避免局部路径计算错误。
博客探讨了ROS机器人在遇到障碍物时局部规划路线出现延迟的问题,问题根源在于costmap_common_params.yaml配置文件中,robot_radius与inflation_radius设置不一致。解决方案是将inflation_radius调整为与robot_radius相同的值,以避免局部路径计算错误。

















 734
734

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言






