









1、本限幅方法将得到的整数定点转回便于与原始数据的小数定点
%%限幅%%
rxFilterOut_real = real(rxFilterOut);
rxFilterOut_imag = imag(rxFilterOut);
rxFilterOut_real(rxFilterOut_real.*2^(AI.l-4)>=2^(AI.l-1))=(2^(AI.l-1)-1)./2^(AI.l-4);
rxFilterOut_real(rxFilterOut_real.*2^(AI.l-4)<=-2^(AI.l-1))=-(2^(AI.l-1)-1)./2^(AI.l-4);
rxFilterOut_imag(rxFilterOut_imag.*2^(AI.l-4)>=2^(AI.l-1))=(2^(AI.l-1)-1)./2^(AI.l-4);
rxFilterOut_imag(rxFilterOut_imag.*2^(AI.l-4)<=-2^(AI.l-1))=-(2^(AI.l-1)-1)./2^(AI.l-4);
rxFilterOut = rxFilterOut_real+1j*rxFilterOut_imag;
1、其中
AI.l表示定点位数;
2、其中使用的数字4为符号位与小数位需要的位数;
3、本方法将幅度限制为定点位数可以表示的最大值。
2、定点相关运算
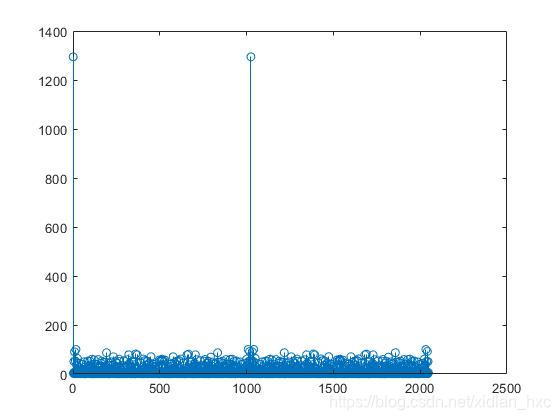
- 定点相关运算确定定时位置一般使用定门限的方法,该门限为了满足所有可能出现的情况一般会使得粗定时(这里表搜索接收帧数据中两段相同的训练符号作相关运算峰值)定时性能较差,而粗定时相关运算的运算量较小(只是在一个时钟加减FIFO中进出的一个值),细定时运算量较大,这样就使得细定时(接收序列与本地序列相关,每个时钟都需要完全重新运算)压力加大,为了减小运算压力,可以将本地训练序列实部虚部只保留符号位,原始数据为0的则保持不表,这样可以大大减小细定时运算量(需要验证原始序列与只保留符号位的序列的相关性,性能过差则不可使用)。
- 实例相关性验证
- Matlab 源码
%% 主函数
chu_1024 = chu(1024);
repmat_chu_3 = repmat(chu_1024,1,3);
real_chu_1024 = real(chu_1024);
imag_chu_1024 = imag(chu_1024);
sign_real_chu_1024 = zeros(1,1024);
index_real = find(real_chu_1024 ~= 0);
sign_real_chu_1024(index_real) = real_chu_1024(index_real)./abs(real_chu_1024(index_real));
sign_imag_chu_1024 = zeros(1,1024);
index_imag = find(imag_chu_1024 ~= 0);
sign_imag_chu_1024(index_imag) = imag_chu_1024(index_imag)./abs(imag_chu_1024(index_imag));
sign_chu_1024 = sign_real_chu_1024 + 1i*sign_imag_chu_1024;
inter = zeros(1,1024*2-1);
for i = 1 : 1024*2-1
inter(i) = sum(repmat_chu_3(i:i+1024-1).*conj(sign_chu_1024));
end
stem(abs(inter))
%% chu序列生成函数
function UW=chu(U)
for n = 0:U-1
F(n+1) = (pi*n*n)./U;
end
I = cos(F);
Q = sin(F);
UW = I + 1i*Q;
end
微信公众号:通信随笔XIDIAN



















 347
347

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











