




 本系统为双轴机构实训平台,包含控制系统与被控对象两部分。控制系统包括水平轴执行机构、人机界面、电源机构及驱动元件等,支持位置控制、高级编程实训。被控对象采用伺服电机驱动。
本系统为双轴机构实训平台,包含控制系统与被控对象两部分。控制系统包括水平轴执行机构、人机界面、电源机构及驱动元件等,支持位置控制、高级编程实训。被控对象采用伺服电机驱动。
系统概述
本系统由控制系统和被控对象两部分组成,可根据课程需要进行双轴机构的轴数增减和循序渐进的运动控制实训。
控制系统部分由水平轴执行机构、人机界面机构、电源机构、驱动元件与控制器等组成。控制方式:人机界面模拟控制。
控制对象部分由水平轴组成;由一台伺服电机拖动。
运动检测实训主要体现在通过脉冲输出对伺服驱动器进行控制、自动调谐性能、机械分析功能、增益搜索功能等。可完成的实训内容包含高级编程、位置控制等实训内容。
一、系统组成
垂直定位系统其中包括:【水平轴执行机构】、【人机界面机构】、【电源机构】、【驱动元件与控制器】。
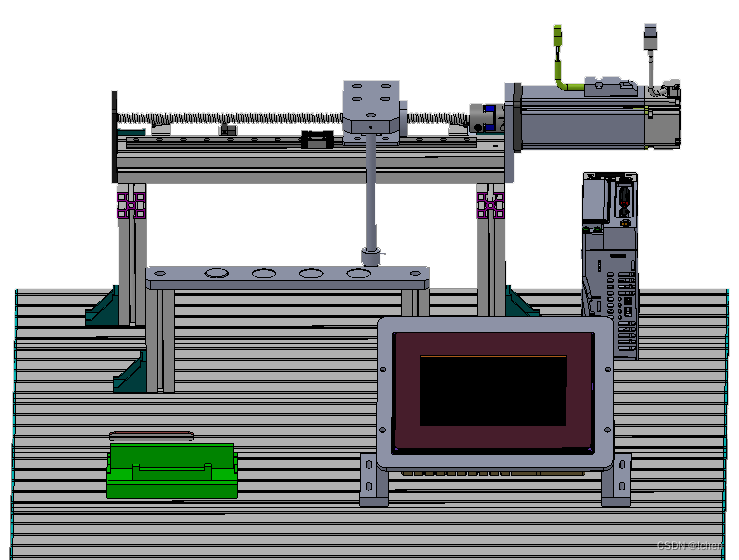
水平轴执行机构:采用伺服电机和传感器,实现水平方向运动。 人机界面机构:虚拟各类按钮和指示灯,及显示和设定伺服电机脉冲值,实现操作控制、 时时监控和脉冲参数的设置。
水平轴执行机构:全长420mm(不包含电机)、机构有效行程200mm、Vmax=100mm/s、双线性轨滚珠丝杠结构、丝杠节距4mm、行程200mm、重复定位精度±0.05mm、配电机安装法兰。 人机界面机构:采用DOP-B07S411,支持RS232、RS485等通讯形式。 电源机构:电源开关 C10 30mA、熔断器 10A*2、24VDC变压器 4.5A。 |
驱动元件与控制器:PLC台达DVP-12SE、伺服控制器 台达ASD-B2-0421-B。
二、操作与维护
1、系统操作
- 系统供电(AC220V、24V),上电请检查用电设备供电情况是否正常,
人机界面开机初始画面点击任意位置切换到系统主画面
本系统采用了位置控制的方式对伺服电机进行控制, 我们可以通过人机界面对四个位置进行手动修改,设置时,请参考“当前输出脉冲值”和电磁铁实际位置进行设置
2、日常维护
- 线路连接:检查各电机电源线及编码器线接口是否接插正确,是否有松动。
- 设备保持清洁:平时注意清理设备上的尘土,请勿放置杂物,严禁液体流入或喷溅。
三、附件
1、PLC I/O分配表
|
PLC型号:DVP-12SE | |||
|
输 入(IN) |
输 出(OUT) | ||
|
地址 |
注 释 |
地址 |
注 释 |
|
X0 |
伺服正限位 |
Y0 |
伺服器脉冲输出 |
|
X1 |
—— |
Y1 |
伺服器旋转方向 |
|
X2 |
伺服负限位 |
Y2 |
电磁铁 |
|
X3 |
—— |
Y3 |
伺服器使能 |
|
X4 |
电机原点传感器 |
|
|
|
X5 |
—— |
|
|
|
X6 |
—— |
|
|
|
X7 |
—— |
|
|
|
注:“——”备用。 | |||


















 2627
2627

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











